| Citation: | ZHANG J,WEN C,YANG X,et al. Design of an electric drive aircraft tug control system based on ADRC[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(5):1017-1026 (in Chinese) doi: 10.13700/j.bh.1001-5965.2021.0377

|
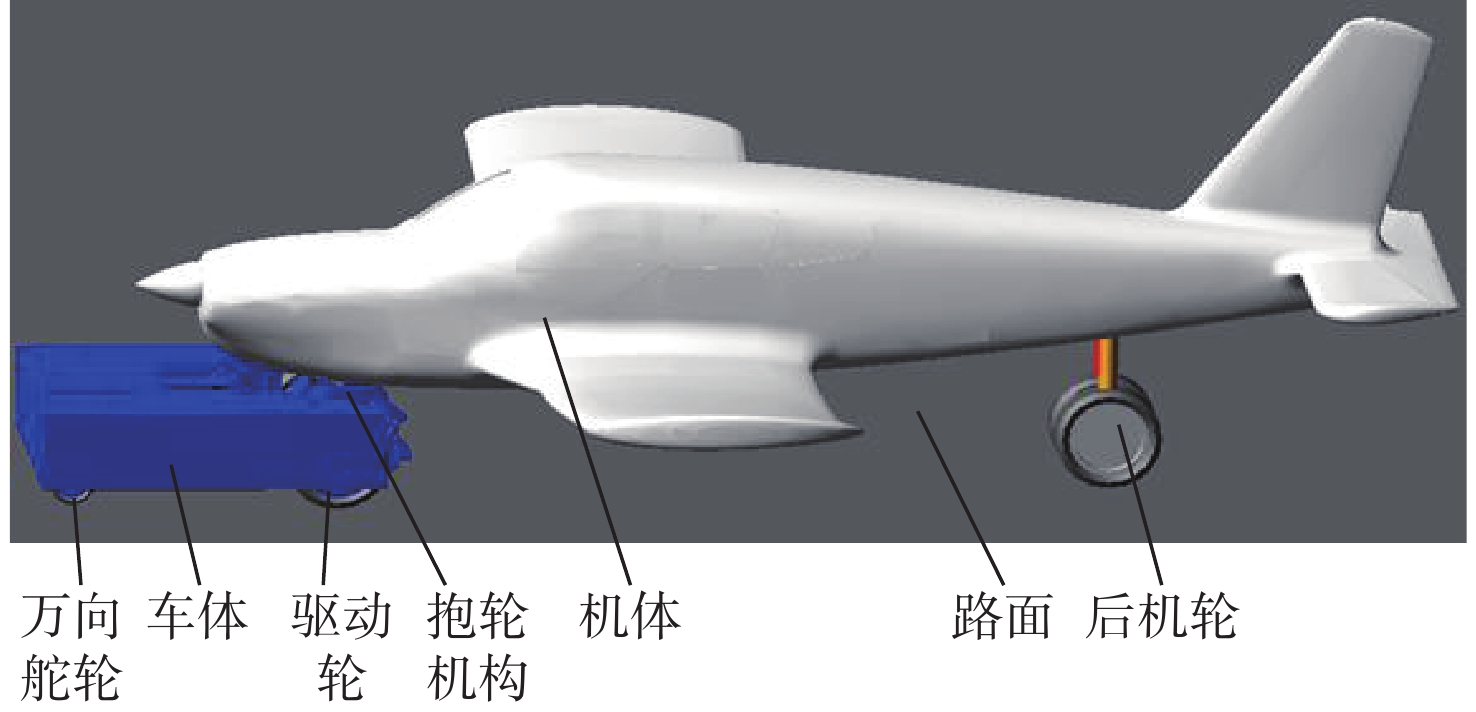
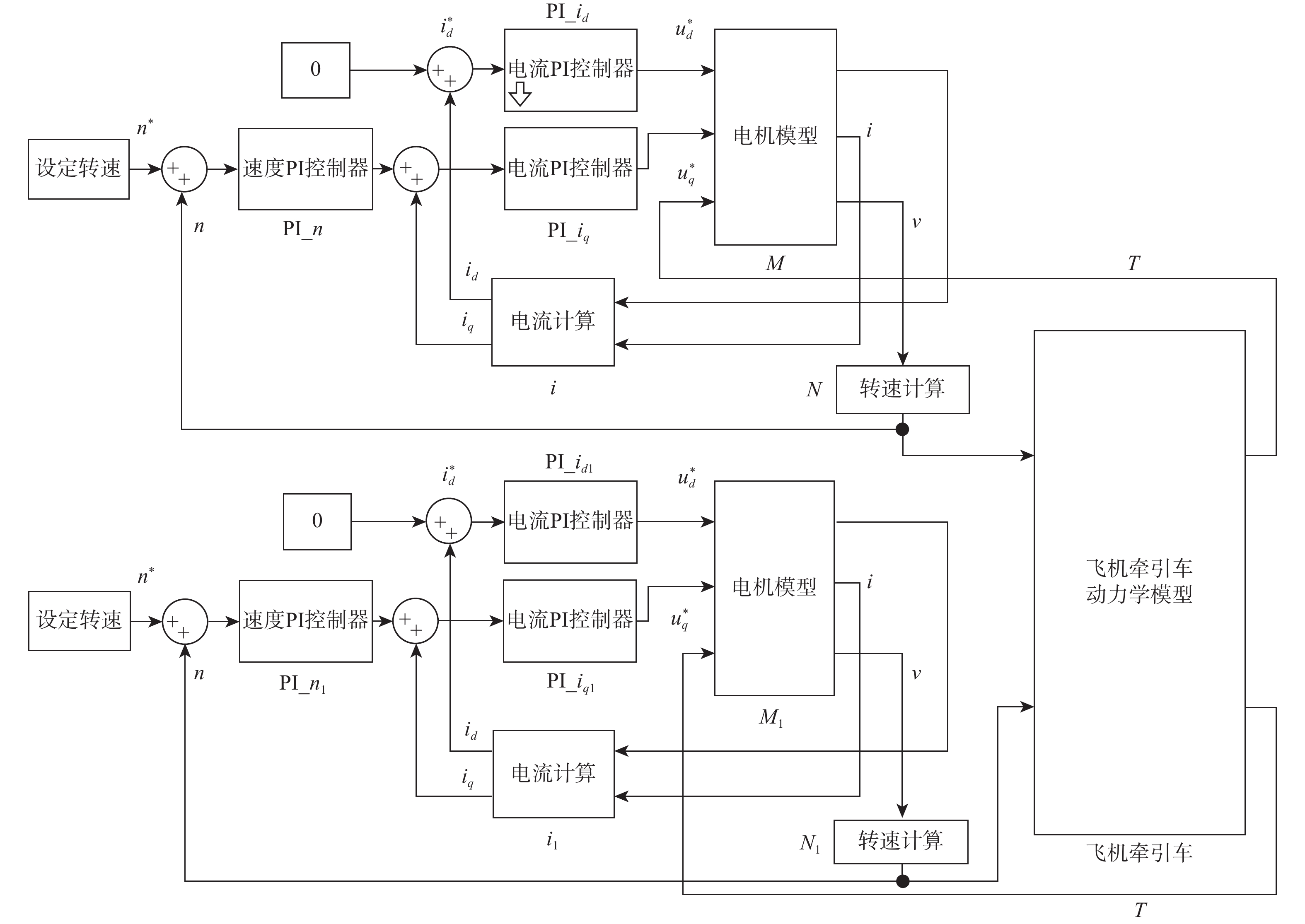
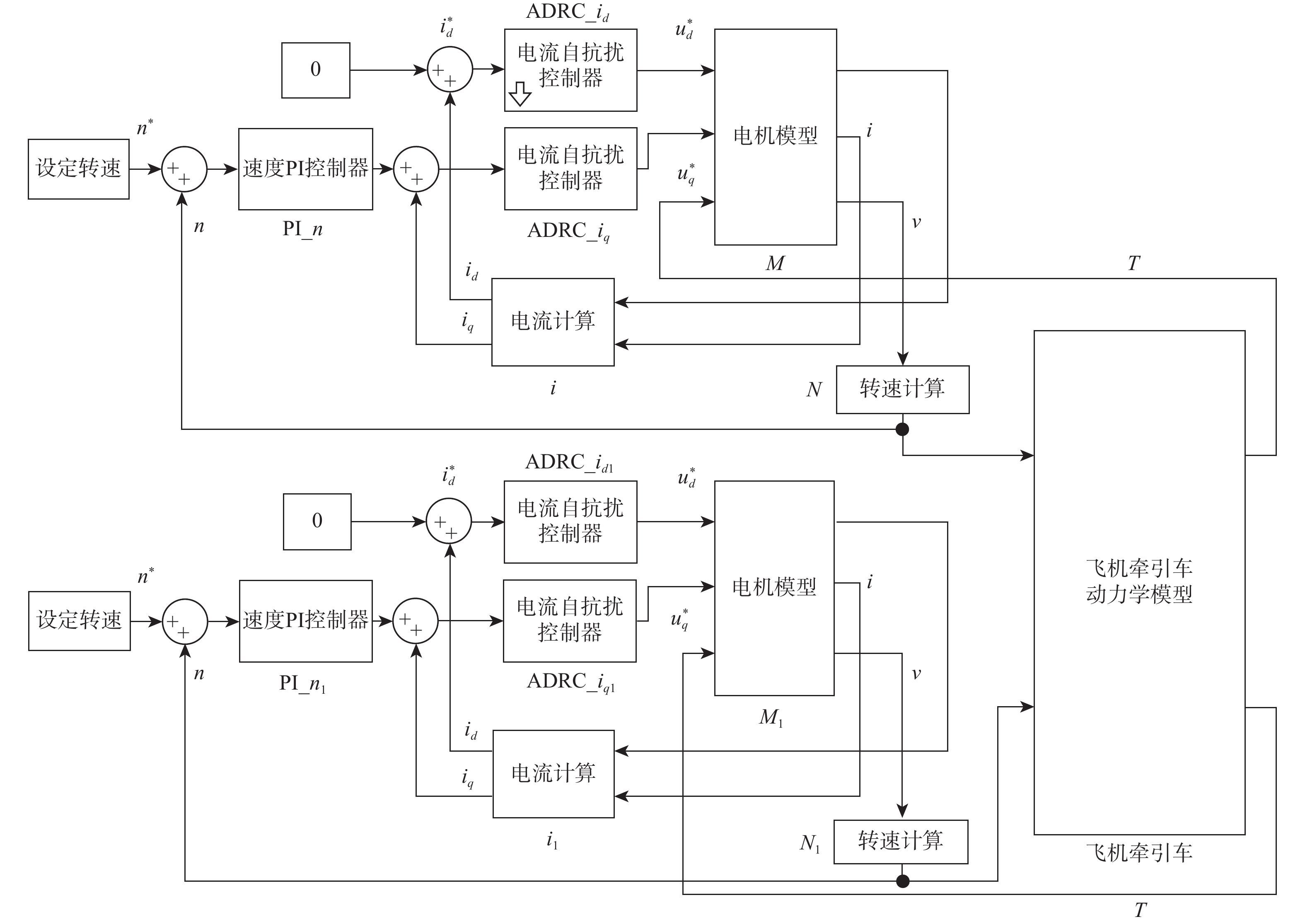
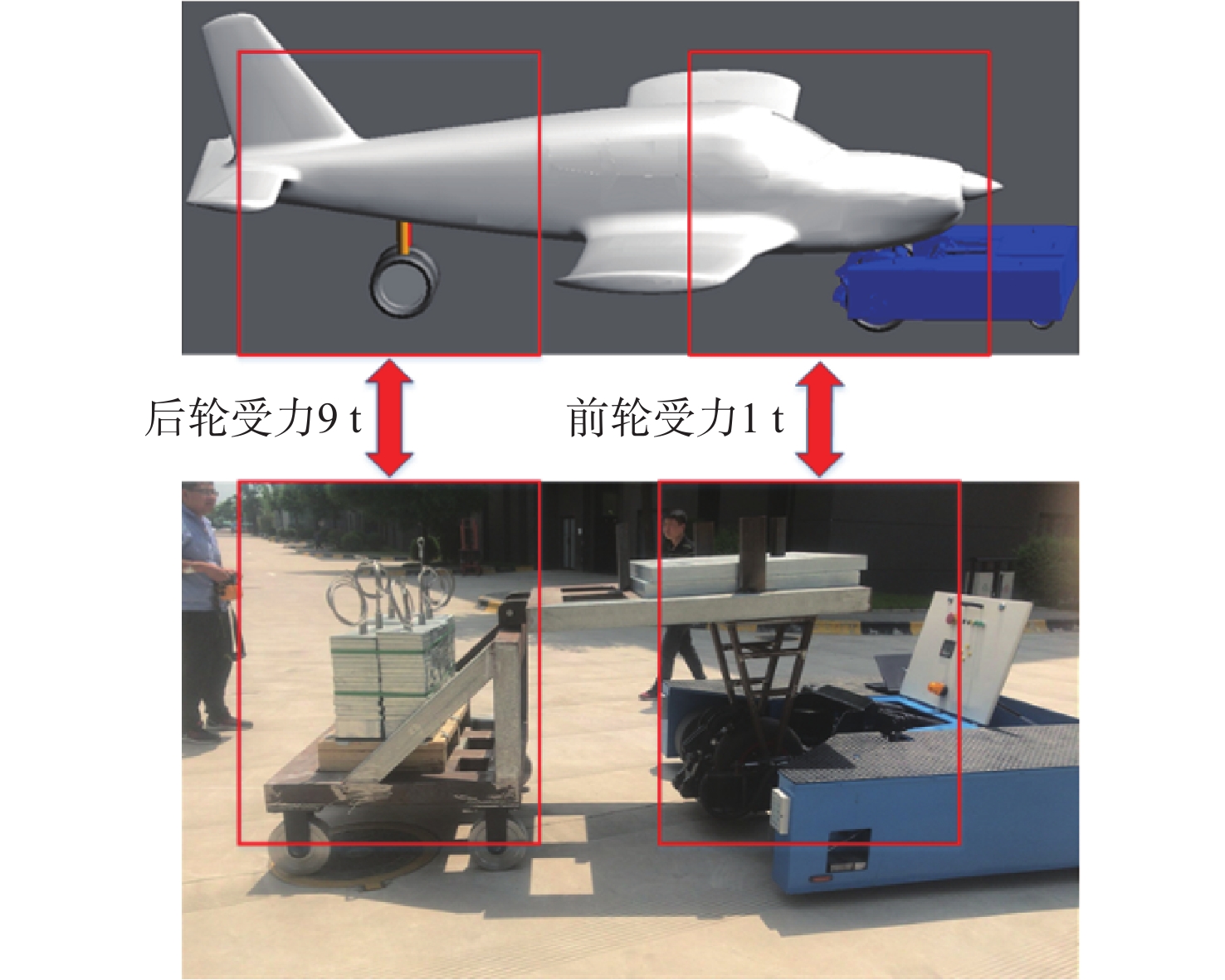
Large inertia, a high center of mass, and time-varying friction are aspects of the aircraft towing process that have a significant impact on the stability of the aircraft tug. In order to improve the stability of the electric aircraft tug, the variable speed and torque that affect the stability of aircraft traction are taken as the research objects, and the control effect of the designed strategy is analyzed. Using ADAMS and MATLAB/Simulink simulation software, the aircraft and tug dynamic model and motor model are constructed, and the second-order nonlinear auto disturbance rejection controller based on speed and torque is designed. The dynamic characteristics of the wheel speed of the aircraft tug based on active disturbance rejection control (ADRC) and PID control during the shifting process are compared and analyzed, and the prototype control test of the shifting process is carried out. The results show that the aircraft traction system based on the second-order nonlinear auto-disturbance rejection control algorithm has better gear shifting effects, and the wheel speed during gear shifting is better in terms of response speed, stability and anti-disturbance ability; the test results match the simulation results, and the coincidence proves the feasibility and correctness of the simulation model and simulation results, which lays the foundation for the research of highly stable aircraft tug.
| [1] |
赵宏伟. A320系列飞机遥控无杆牵引车结构设计和力学分析[D]. 天津: 中国民航大学, 2017: 10-20.
ZHAO H W. Structural design and mechanical analysis of A320 series aircraft remote control rodless tug[D]. Tianjin: Civil Aviation University of China, 2017: 10-20(in Chinese).
|
| [2] |
朱贺. 飞机牵引系统制动性能分析[D]. 天津: 中国民航大学, 2016: 15-25.
ZHU H. Analysis of the braking performance of aircraft traction system[D]. Tianjin: Civil Aviation University of China, 2016: 15-25 (in Chinese).
|
| [3] |
王志, 陈文科, 闫洪峰, 等. 电动无杆飞机牵引车设计[J]. 液压气动与密封, 2006(3): 8-10.
WANG Z, CHEN W K, YAN H F, et al. Design of electric rodless aircraft tractor[J]. Hydraulics Pneumatics & Seals, 2006(3): 8-10(in Chinese).
|
| [4] |
魏延辉, 彭富国, 盛超, 等. 自主式水下机器人运动稳定性控制方法[J]. 华中科技大学学报(自然科学版), 2014, 42(2): 127-132.
WEI Y H, PENG F G, SHENG C, et al. Motion stability control method of autonomous underwater robot[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2014, 42(2): 127-132(in Chinese).
|
| [5] |
俞建成, 张艾群, 王晓辉, 等. 基于模糊神经网络水下机器人直接自适应控制[J]. 自动化学报, 2007, 33(8): 840-846.
YU J C, ZHANG A Q, WANG X H, et al. Motion stability control method of autonomous underwater robot[J]. Acta Automatica Sinica, 2007, 33(8): 840-846(in Chinese).
|
| [6] |
魏静波, 刘昆, 吴锦杰. 惯性定向三轴稳定卫星姿态自适应滑模控制[J]. 控制与决策, 2013, 28(8): 1231-1234. doi: 10.13195/j.cd.2013.08.113.weijb.007
WEI J B, LIU K, WU J J. Inertially oriented three-axis stabilized satellite attitude adaptive sliding mode control[J]. Control and Decision, 2013, 28(8): 1231-1234(in Chinese). doi: 10.13195/j.cd.2013.08.113.weijb.007
|
| [7] |
殷春武, 刘素兵. 非合作目标捕获过程中姿态反演滑模控制[J]. 控制工程, 2019, 26(2): 276-281. doi: 10.14107/j.cnki.kzgc.160311
YING C W, LIU S B. Attitude inversion sliding mode control in the process of non-cooperative target acquisition[J]. Control Engineering, 2019, 26(2): 276-281(in Chinese). doi: 10.14107/j.cnki.kzgc.160311
|
| [8] |
马龙, 孙汉旭, 宋荆洲, 等. 一种球形机器人高速直线运动的自适应控制方法[J]. 振动与冲击, 2021, 40(6): 201-211. doi: 10.13465/j.cnki.jvs.2021.06.027
MA L, SUN H X, SONG J Z, et al. An adaptive control method for high-speed linear motion of spherical robot[J]. Journal of Vibration and Shock, 2021, 40(6): 201-211(in Chinese). doi: 10.13465/j.cnki.jvs.2021.06.027
|
| [9] |
DUMLU A. Design of a fractional-order adaptive integral sliding mode controller for the trajectory tracking control of robot manipulators[J]. Proceedings of the Institution of Mechanical Engineers, Part I:Journal of Systems and Control Engineering, 2018, 232(9): 1212-1229. doi: 10.1177/0959651818778218
|
| [10] |
YUE M, LIU B Y, WEI X, et al. Adaptive sliding-mode control of spherical robot with estimated rolling resistance[J]. Cybernetics and Systems, 2014, 45(5): 407-417. doi: 10.1080/01969722.2014.919205
|
| [11] |
周凯, 孙彦成, 王旭东, 等. 永磁同步电机的自抗扰控制调速策略[J]. 电机与控制学报, 2018, 22(2): 57-63. doi: 10.15938/j.emc.2018.02.008
ZHOU K, SUN Y C, WANG X D, et al. Speed regulation strategy of auto-disturbance rejection control for permanent magnet synchronous motor[J]. Electric Machines and Control, 2018, 22(2): 57-63(in Chinese). doi: 10.15938/j.emc.2018.02.008
|
| [12] |
李锦英, 付承毓, 唐涛, 等. 运动平台上光电跟踪系统的自抗扰控制器设计[J]. 控制理论与应用, 2012, 29(7): 955-958.
LI J Y, FU C Y, TANG T, et al. Design of active disturbance rejection controller for photoelectric tracking system on motion platform[J]. Control Theory and Applications, 2012, 29(7): 955-958(in Chinese).
|
| [13] |
孙明玮, 邱德敏, 王永坤, 等. 大口径深空探测天线的抗风干扰伺服系统[J]. 光学精密工程, 2013, 21(6): 1568-1575. doi: 10.3788/OPE.20132106.1568
SUN M W, QIU D M, WANG Y K, et al. Anti-wind interference servo system of large-aperture deep-space detection antenna[J]. Optics and Precision Engineering, 2013, 21(6): 1568-1575(in Chinese). doi: 10.3788/OPE.20132106.1568
|
| [14] |
朱进权, 葛琼璇, 王晓新, 等. 基于自抗扰和负载功率前馈的高速磁悬浮系统PWM整流器控制策略[J]. 电工技术学报, 2021, 36(2): 320-329. doi: 10.19595/j.cnki.1000-6753.tces.191572
ZHU J Q, GE Q X, WANG X X, et al. PWM rectifier control strategy for high-speed magnetic levitation system based on auto disturbance rejection and load power feedforward[J]. Transactions of China Electrotechnical Society, 2021, 36(2): 320-329(in Chinese). doi: 10.19595/j.cnki.1000-6753.tces.191572
|
| [15] |
周新力, 李醒飞. 光电跟踪系统积分反步自抗扰控制策略[J]. 天津大学学报(自然科学与工程技术版), 2021, 54(4): 378-387.
ZHOU X L, LI X F. PWM rectifier control strategy for high-speed magnetic levitation system based on auto disturbance rejection and load power feedforward[J]. Journal of Tianjin University (Science and Technology), 2021, 54(4): 378-387(in Chinese).
|
| [16] |
姚芳, 林祥辉, 吴正斌, 等. 汽车防抱死制动系统的自抗扰控制研究[J]. 中国公路学报, 2021, 34(3): 1-10. doi: 10.19721/j.cnki.1001-7372.2021.03.018
YAO F, LIN X H, WU Z B, et al. Research on auto disturbance rejection control of automobile anti-lock braking system[J]. China Journal of Highway and Transport, 2021, 34(3): 1-10(in Chinese). doi: 10.19721/j.cnki.1001-7372.2021.03.018
|
| [1] | TANG Wenting, LI Bo, JI Mengqi. Lightweight Neural Network Design for Infrared Small Ship Detection[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0747 |
| [2] | BAI He, LI Yu, HAO Ming, XU Tingting. Graph neural network recommendation algorithm fused with dual-channel attention and time encoding[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0795 |
| [3] | REN Liqiang, WANG Haipeng, PAN Xinlong, WAN Bing, TANG Tiantian. A complex maneuver recognition method based on wavelet time-frequency image and lightweight CNN-Transformer hybrid neural network[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0745 |
| [4] | FAN Yu, JIANG Chenxi, WANG Wenjun, ZHOU Jingze. On the Detection of Multiple Bolt Loosening based on Wave Mode Information and Neural Network[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0800 |
| [5] | LU S Q,GUAN F X,LAI H T,et al. Two-stage underwater image enhancement method based on convolutional neural networks[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(1):321-332 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.1003. |
| [6] | ZHEN Chong, FENG Xinyu. Carrier-based aircraft direct lift control based on sliding mode observer and non-linear dynamic inversion technology[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0373 |
| [7] | JI X,WU T X,WANG H G,et al. Attribute aggregation entity alignment based on multi-channel graph neural network[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(9):2791-2799 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0703. |
| [8] | ZHAO S,LIN L,LI Z,et al. Deck motion prediction and compensation technology based on BP neural network[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(9):2772-2780 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0743. |
| [9] | LI Rui, TANG Xun, DU Yanwei, ZHANG Rui, XU Bin. Terrain contour aided navigation based on neural network[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0376 |
| [10] | NIE Li, LI Chenliang, LIU Wangkui, SHEN Haidong, LIU Yanbin, CHEN Jinbao. Adaptive neural network based fixed-time command-filtered control for quadrotor unmanned aerial vehicles[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0403 |
| [11] | YI Shaopeng, DONG Wei, WANG Weilin, WANG Chunyan, YI Aiqing, WANG Jianan. Neural Network Controller-Based Safe Landing Algorithm for UAVs[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0402 |
| [12] | YAN Kun, ZHAO Jin-ze, CHEN Chao-bo, GAO Song, CAO Kai. Neural network-based fault tolerant control for unmanned helicopter with multiple actuator faults[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0699 |
| [13] | ZHOU Y J,WAN Q,XU Y Z,et al. Redundancy design of a FADS system on a complex leading-edge vehicle using neural network approach[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(3):757-764 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0341. |
| [14] | LIU Qiang, SHANG Shang, QIAO Tie-zhu, ZHU Jian, SHI Yi-shan. Ionospheric clutter suppression method based on improved TCN-Elman neural network[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0429 |
| [15] | ZHANG Wei, CHANG Ben-qiang, YANG Xu, XIONG Xiao. Fire source localization prediction for long and short term memory networks based on Bayesian optimization algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0482 |
| [16] | WANG Y G,YAO S Z,TAN H B. Residual SDE-Net for uncertainty estimates of deep neural networks[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(8):1991-2000 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0604. |
| [17] | JIANG Y,CHEN M Y,YUAN Q,et al. Departure flight delay prediction based on spatio-temporal graph convolutional networks[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(5):1044-1052 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0415. |
| [18] | BAI Chao-ping, ZHANG Shen-yi, ZHANG Xin, SUN Yue-qiang, ZHANG Shuai, WANG Zi-ting. Spaceborne particle identification platform and application based on convolutional neural network[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0171 |
| [19] | ZHAO J Y,HU J,YAO J Y,et al. EHA fault diagnosis and fault tolerant control based on adaptive neural network robust observer[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(5):1209-1221 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0416. |
| [20] | SHU Hong-bin, YU Chuan-qiang, LIU Zhi-hao, TANG Sheng-jin, CHEN Jian-wei. State estimation of multi-axle special vehicles by fusion of neural network and unscented Kalman filter[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2022.0535 |


Figures(13) / Tables(6)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

LIU H Y,MA Z Q,YE Y F,et al. Smart contracts-as-a-service with on-chain and off-chain collaboration[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(10):3262-3273 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0784




 DownLoad:
DownLoad: