| Citation: | TANG Z Y,MA F Y,PEI Z C. Improved PSO-RBF neural network adaptive sliding mode control for quadrotor systems[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(7):1563-1572 (in Chinese) doi: 10.13700/j.bh.1001-5965.2021.0477

|
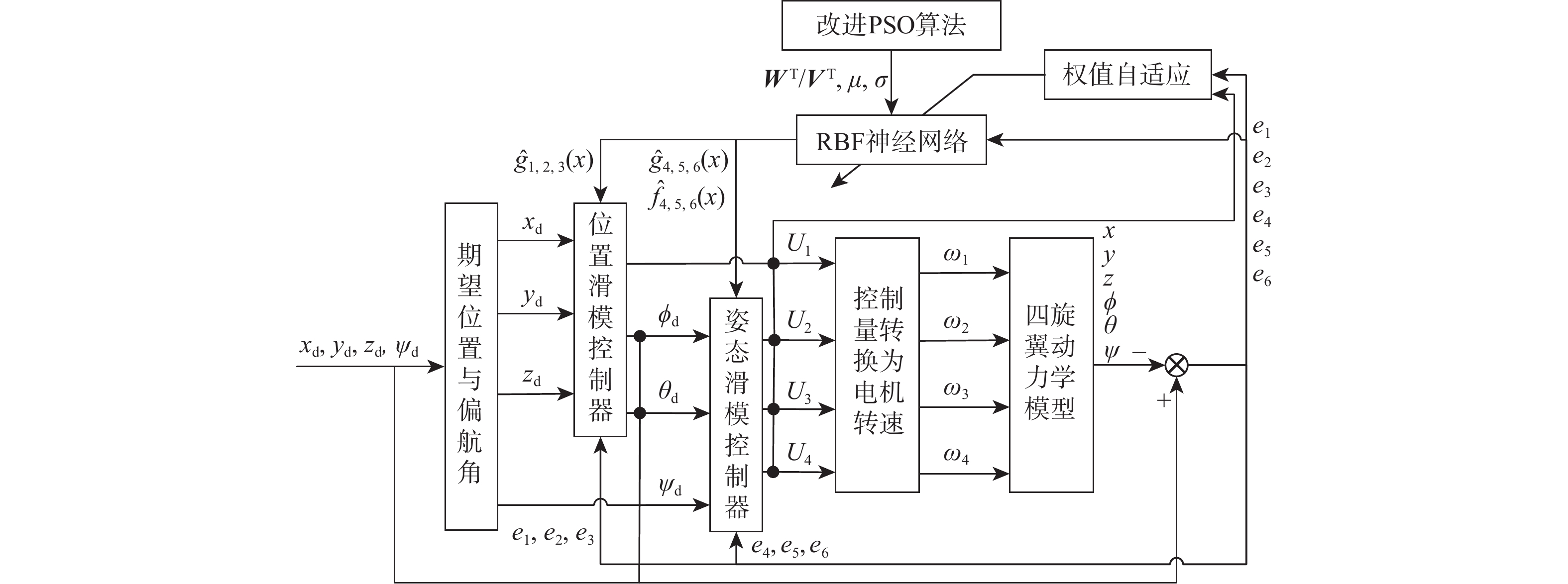
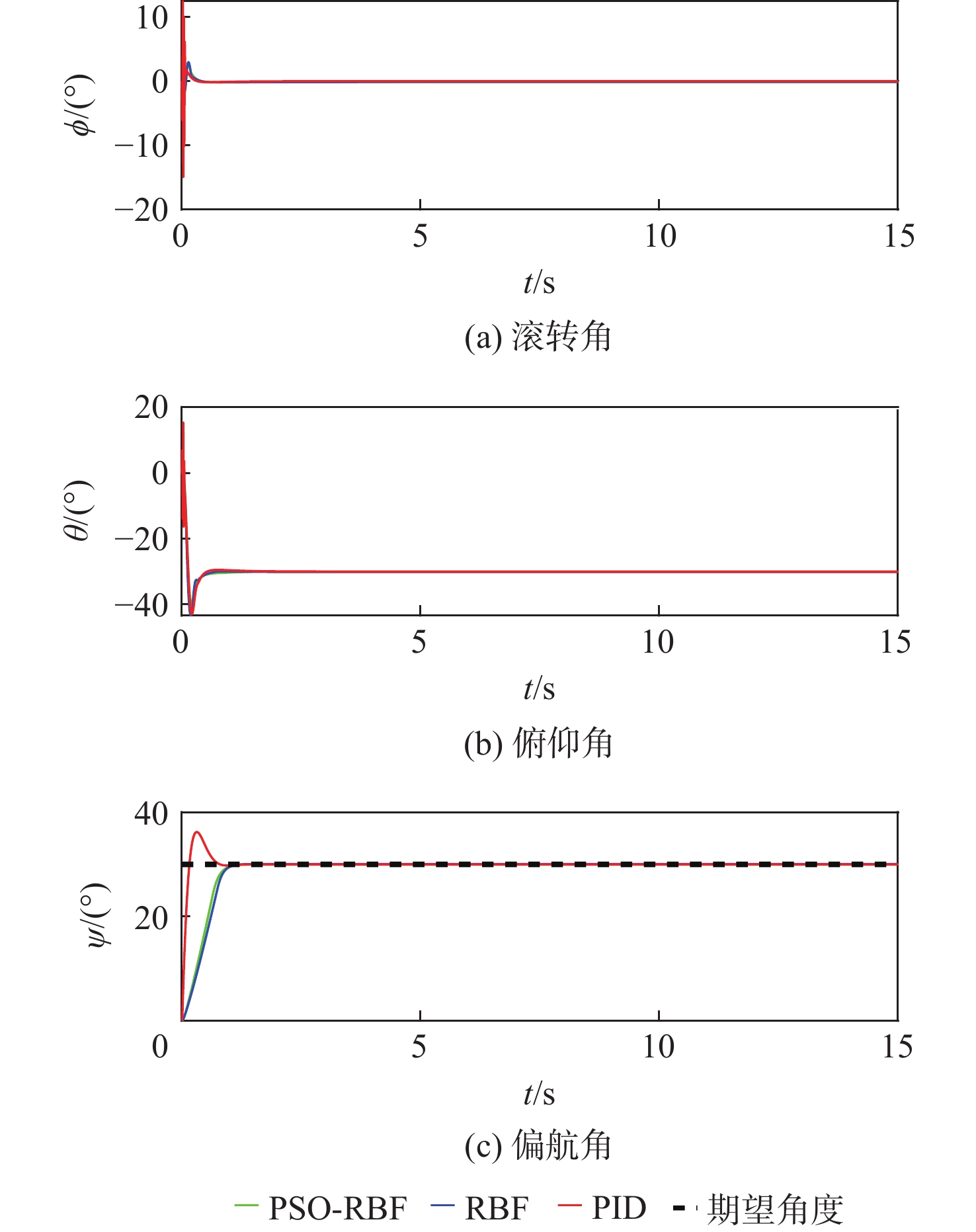
An improved particle swarm optimization-radial basis function (PSO-RBF) neural network adaptive sliding mode controller is proposed for quadrotor systems with nonlinearity, strong coupling, and inaccurate interference. First, based on smooth improvement of the control amount of the RBF neural network sliding mode controller, an improved particle swarm optimization with global optimization capability was used to adjust the fitting parameters of the RBF neural network, thus improving the fitting ability of the network. Next, a dynamic model of quadrotor was built according to themodel parameters of actual quadrotors, the stability of which was then proved by Lyapunov theory.In contrast to the RBF neural network adaptive sliding mode controller and the double closed-loop PID controller, the improved PSO-RBF neural network adaptive sliding mode controller can find the appropriate control quantity in one control cycle, and its adjustment time is about 50% and 75% faster than that of RBF neural network adaptive sliding mode controller and double closed-loop PID controller, respectively. The simulation results show that the improved PSO-RBF neural network adaptive sliding mode controller featuresfasttrack speed with high accuracy, strong disturbance rejection and better robustness.

| [1] |
FU J, CHAI T, SU C, et al. Motion/force tracking control of nonholonomic mechanical systems via combining cascaded design and backstepping[J]. Automatica, 2013, 49(12): 3682-3686. doi: 10.1016/j.automatica.2013.09.004
|
| [2] |
李众, 沈炜皓. 四旋翼无人机的反步RBF网络自适应控制[J]. 指挥控制与仿真, 2020, 42(2): 89-94. doi: 10.3969/j.issn.1673-3819.2020.02.017
LI Z, SHEN W H. Backstepping sliding mode RBF network adaptive attitude control for quadrotor unmanned aerial vehicle[J]. Fire Control & Command Control, 2020, 42(2): 89-94(in Chinese). doi: 10.3969/j.issn.1673-3819.2020.02.017
|
| [3] |
韩业壮, 华容. 四旋翼飞行器的RBF网络自适应滑模控制[J]. 电光与控制, 2017, 24(11): 22-27. doi: 10.3969/j.issn.1671-637X.2017.11.005
HAN Y Z, HUA R. RBF neural network adaptive sliding mode control for quadrotor aerial vehicle[J]. Electronics Optics & Control, 2017, 24(11): 22-27(in Chinese). doi: 10.3969/j.issn.1671-637X.2017.11.005
|
| [4] |
陈骥. 基于双环PID的四旋翼飞行器自主飞行研究[J]. 机电一体化, 2018, 24(7): 22-27. doi: 10.16413/j.cnki.issn.1007-080x.2018.07.004
CHEN J. Research on autonomous flight of quadrotor based on double-loop PID[J]. Mechatronics, 2018, 24(7): 22-27(in Chinese). doi: 10.16413/j.cnki.issn.1007-080x.2018.07.004
|
| [5] |
马敏, 许中冲, 常辰飞, 等. 基于PID和LQR的四旋翼无人机控制系统研究[J]. 测控技术, 2016, 35(10): 42-45. doi: 10.3969/j.issn.1000-8829.2016.10.011
MA M, XU Z C, CHANG C F, et al. Research on four-rotor UAV control system based on PID and LQR[J]. Measurement & Control Technology, 2016, 35(10): 42-45(in Chinese). doi: 10.3969/j.issn.1000-8829.2016.10.011
|
| [6] |
刘慧博, 彭亮, 赵旭. 四旋翼飞行器姿态控制方法研究[J]. 自动化应用, 2020(12): 4-7. doi: 10.19769/j.zdhy.2020.12.002
LIU H B, PENG L, ZHAO X. Research on attitude control method of quadrotor[J]. Automation Application, 2020(12): 4-7(in Chinese). doi: 10.19769/j.zdhy.2020.12.002
|
| [7] |
TAN L, LU L, JIN G. Attitude stabilization control of a quadrotor helicopter using integral backstepping[C]//International Conference on Automatic Control and Artificial Intelligence. London: IET, 2012.
|
| [8] |
姜洋. 四旋翼垂直起降机的鲁棒控制问题研究[D]. 哈尔滨: 哈尔滨工业大学, 2009.
JIANG Y. Research of four rotor vertical take-offs and landings aircraft robust control[D]. Harbin: Harbin Instituteof Technology, 2009(in Chinese).
|
| [9] |
高福海, 胡盛斌, 王晨悦. 基于内外环的四旋翼飞行器的双模糊滑模控制[J]. 智能计算机与应用, 2020, 10(7): 158-165.
GAO F H, HU S B, WANG C Y. Double fuzzy sliding mode control of four rotor vehicle based on inner and outer rings[J]. Intelligent Computer and Applications, 2020, 10(7): 158-165(in Chinese).
|
| [10] |
王翼虎, 王思明. 基于改进粒子群算法的无人机路径规划[J]. 计算机工程与科学, 2020, 42(9): 1690-1696. doi: 10.3969/j.issn.1007-130X.2020.09.020
WANG Y H, WANG S M. UAV path planning based on improved particle swarm optimization[J]. Computer Engineering & Science, 2020, 42(9): 1690-1696(in Chinese). doi: 10.3969/j.issn.1007-130X.2020.09.020
|
| [11] |
SESHAGIRI S, KHALIL H K. Output feedback control of nonlinear systems using RBF neural networks[J]. IEEE Transactions on Neural Networks, 2000, 11(1): 69-79. doi: 10.1109/72.822511
|
| [12] |
孙瑞华, 郑重, 幸家正, 等. 基于RBF神经网络优化的四旋翼PID控制系统设计[J]. 自动化应用, 2018(5): 3-4. doi: 10.3969/j.issn.1674-778X.2018.05.002
SUN R H, ZHENG Z, XING J Z, et al. Design of quadrotor PID control system based on RBF neural networks[J]. Automation Application, 2018(5): 3-4(in Chinese). doi: 10.3969/j.issn.1674-778X.2018.05.002
|
| [13] |
LIN X, WANG Y, LIU Y. Neural network-based robust terminal sliding-mode control of quadrotor[J]. Asian Journal of Control, 2022, 24(1): 427-438. doi: 10.1002/asjc.2478
|
| [14] |
郝海燕, 王新军. 基于改进PSO-RBF滑模控制的光伏系统控制方法[J]. 电源技术, 2020, 44(8): 1148-1151. doi: 10.3969/j.issn.1002-087X.2020.08.019
HAO H Y, WANG X J. Method of tracking maximum power point of photovoltaic system based on improved PSO-RBF sliding mode control[J]. Chinese Journal of Power Sources, 2020, 44(8): 1148-1151(in Chinese). doi: 10.3969/j.issn.1002-087X.2020.08.019
|
| [15] |
付兴武, 胡洋. 基于改进粒子群算法的三维路径规划[J]. 电光与控制, 2021, 28(3): 86-89. doi: 10.3969/j.issn.1671-637X.2021.03.017
FU X W, HU Y. Three-dimensional path planning based on improved PSO algorithm[J]. Electronics Optics & Control, 2021, 28(3): 86-89(in Chinese). doi: 10.3969/j.issn.1671-637X.2021.03.017
|
| [16] |
MAHONY R, KUMAR V, CORKE P. Multi-rotor aerial vehicles: Modeling, estimation, and control of quadrotor[J]. IEEE Robotics and Automation Magazine, 2012, 19(3): 20-32. doi: 10.1109/MRA.2012.2206474
|
| [17] |
朱毅飞, 林德福, 莫雳, 等. 四旋翼无人机旋翼对机身非定常气动干扰特性[J]. 兵工学报, 2022, 43(2): 410-422. doi: 10.3969/j.issn.1000-1093.2022.02.019
ZHU Y F, LIN D F, MO L, et al. Transient aerodynamic interference between rotor and fuselage for a quadcopter[J]. Acta Armamentarii, 2022, 43(2): 410-422(in Chinese). doi: 10.3969/j.issn.1000-1093.2022.02.019
|
| [18] |
刘金琨. 滑模变结构控制MATLAB仿真[M]. 3版. 北京: 清华大学出版社, 2015: 15-28.
LIU J K. Sliding mode control design and MATLAB simulation[M]. 3rd ed. Beijing: Tsinghua University Press, 2015: 15-28(in Chinese).
|
| [19] |
申珊颖. 斜十字四旋翼飞行器实验建模与控制技术研究[D]. 南京: 南京航空航天大学, 2013: 20-42.
SHEN S Y. Modelling based on experiment and control technology of an oblique cross quadrotor[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2013: 20-42(in Chinese).
|
| [20] |
WANG X, CHEN Z, YANG G. Finite-time-convergent differentiator based on singular perturbation technique[J]. IEEE Transactions on Automatic Control, 2007, 52(9): 1731-1737. doi: 10.1109/TAC.2007.904290
|

Figures(9) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: