| Citation: | WANG Z D,GUANG C H,WANG L Q,et al. Design and implementation of robot-assisted subretinal injection system[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(9):2406-2414 (in Chinese) doi: 10.13700/j.bh.1001-5965.2021.0667

|
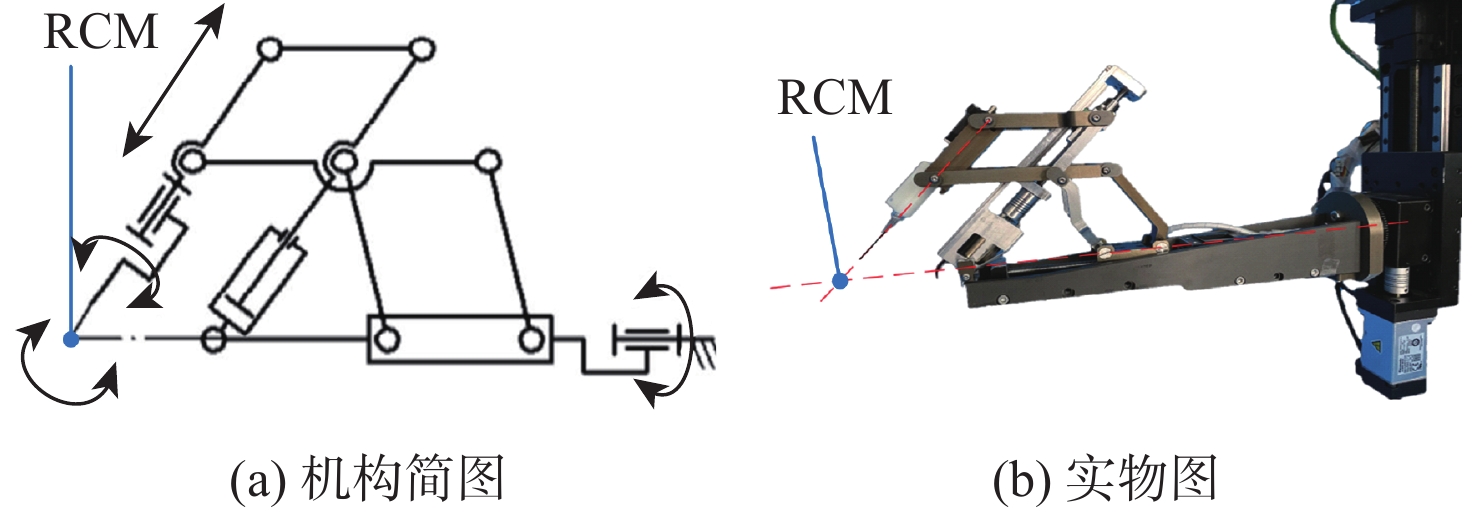
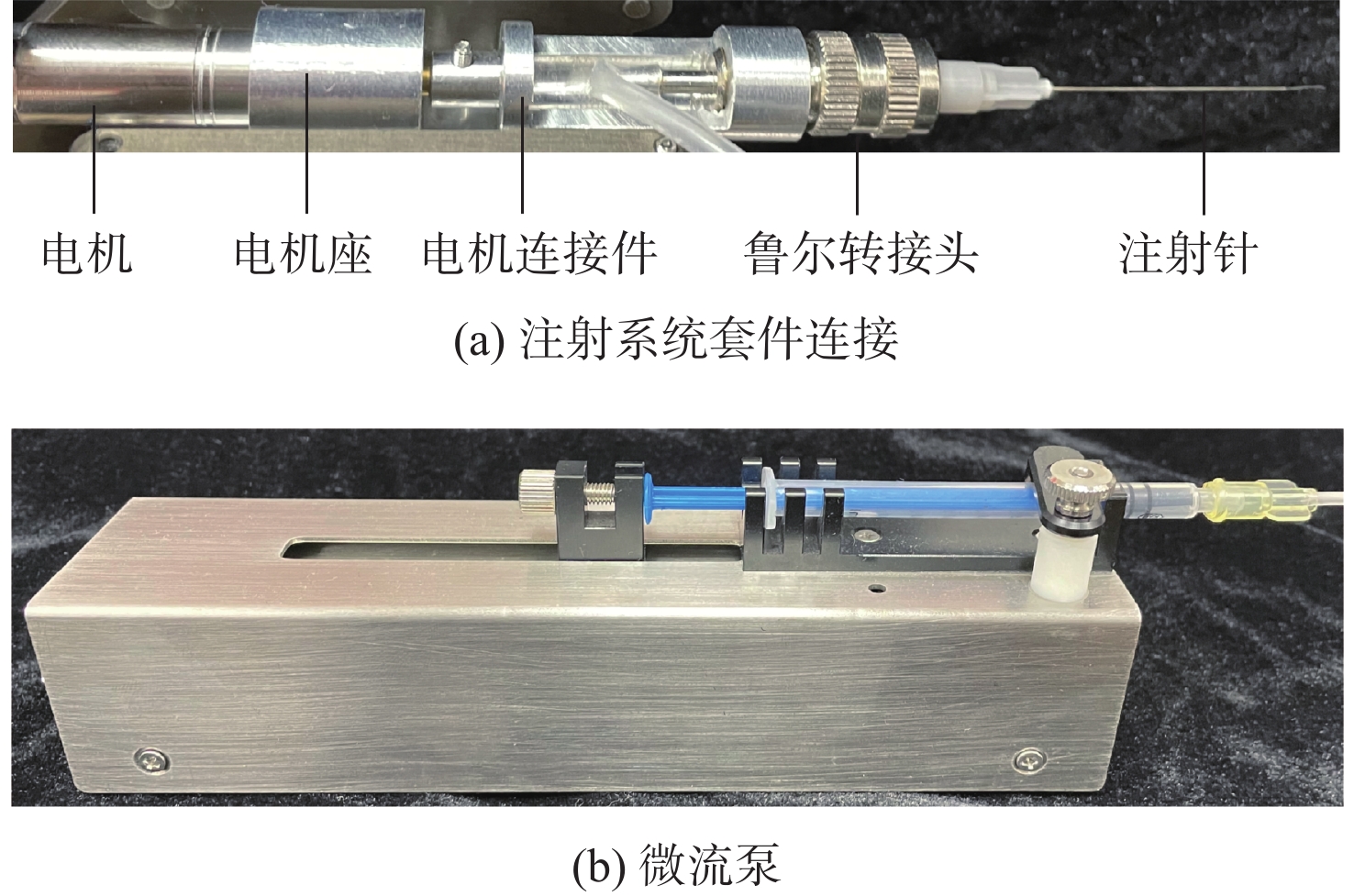
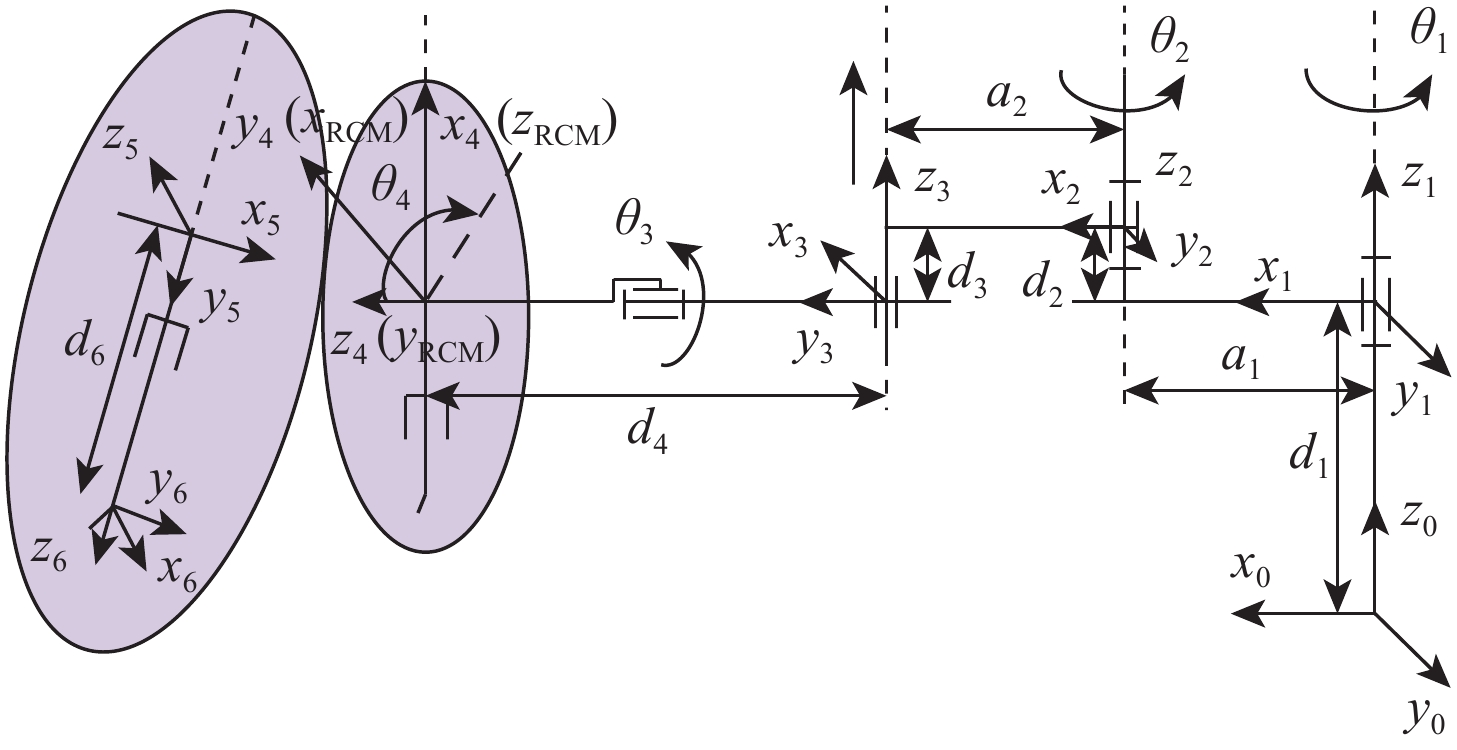
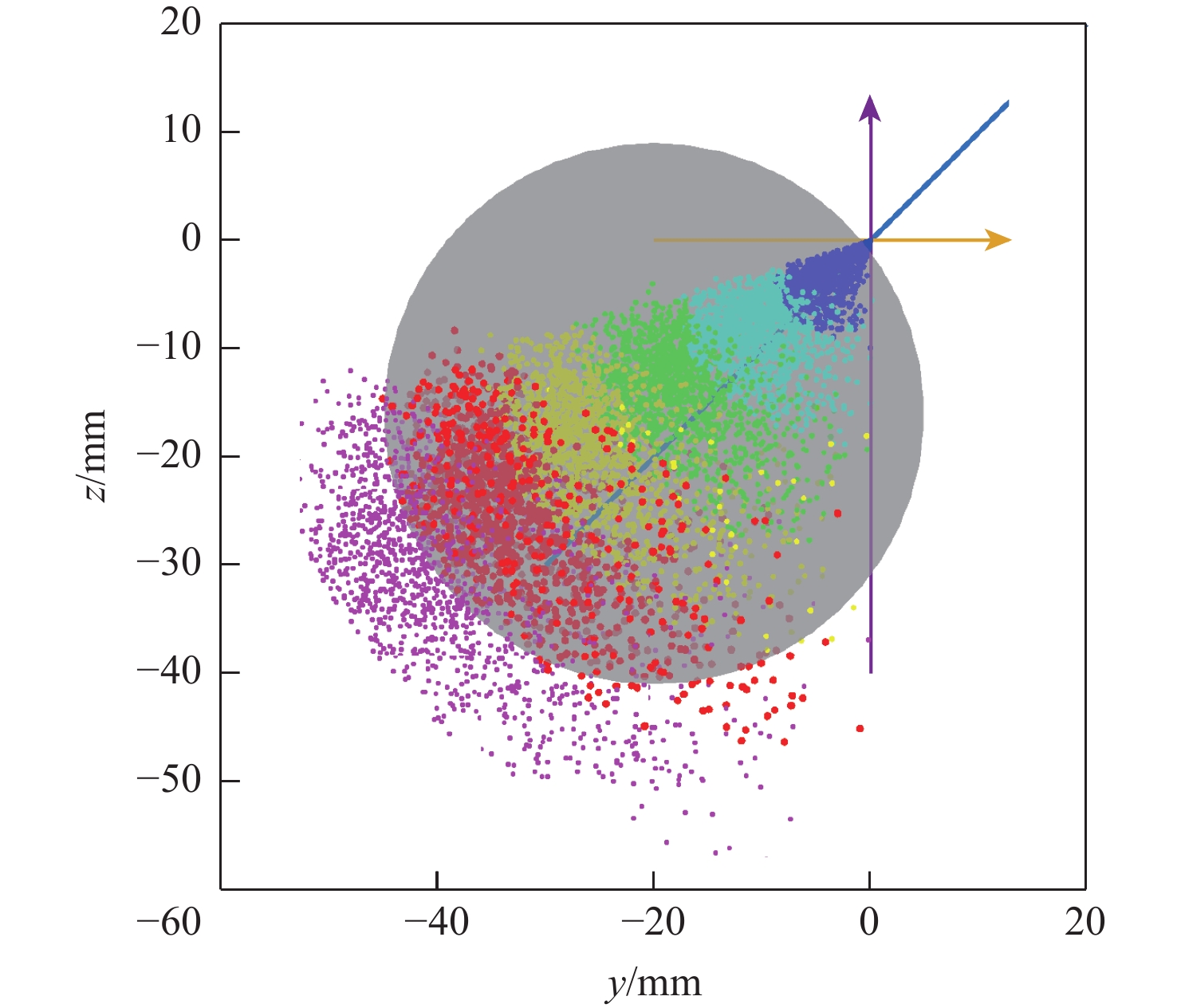
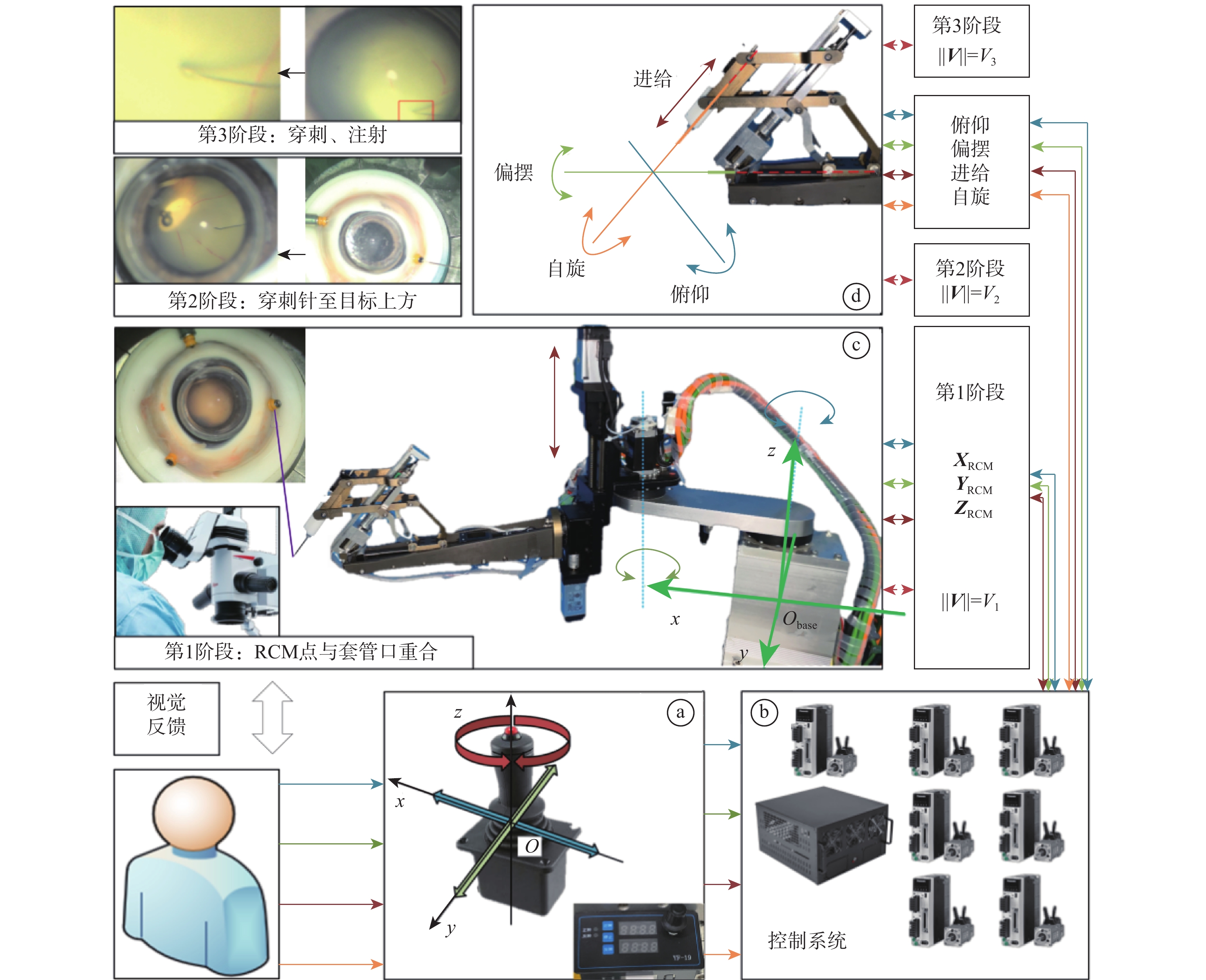
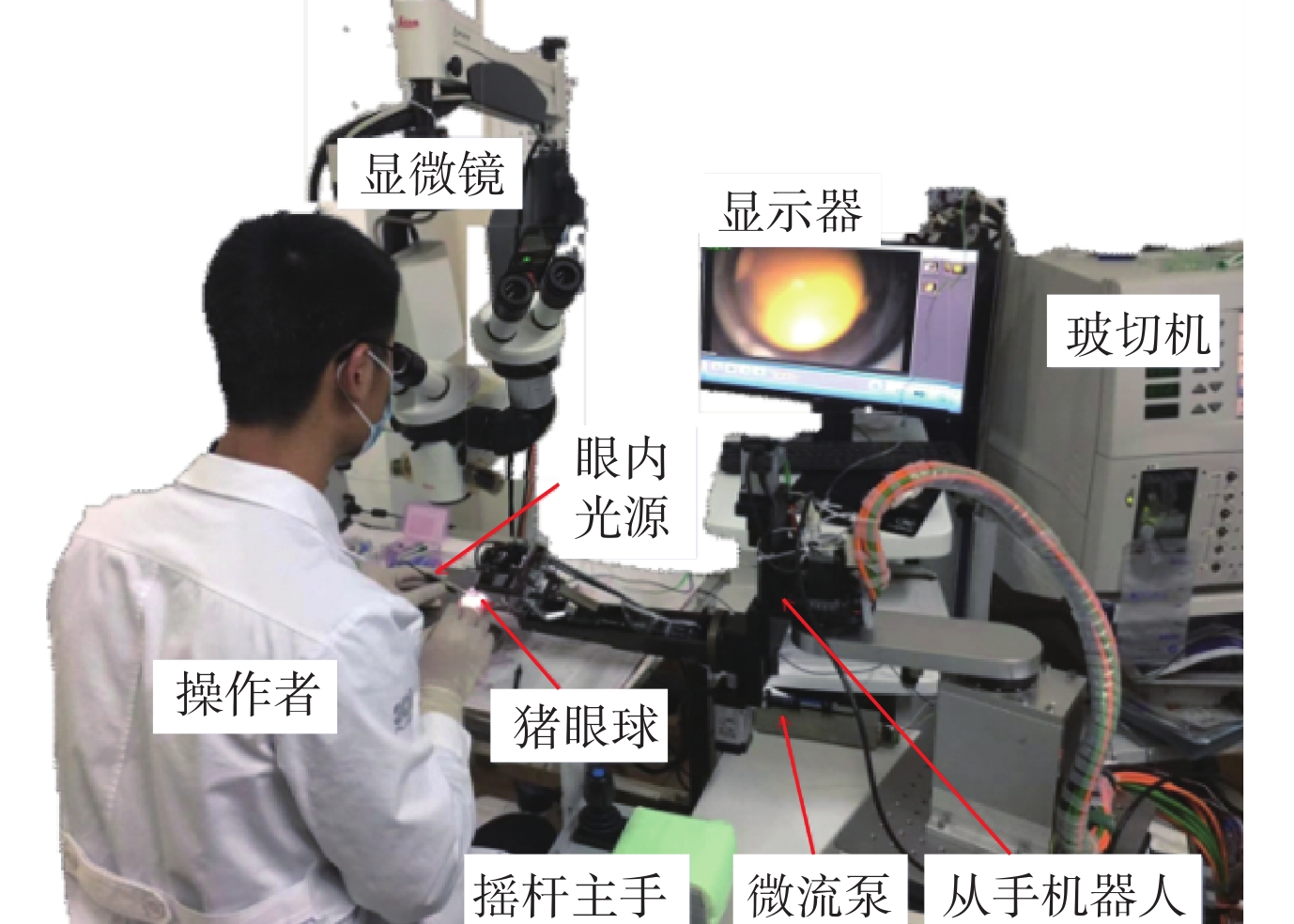
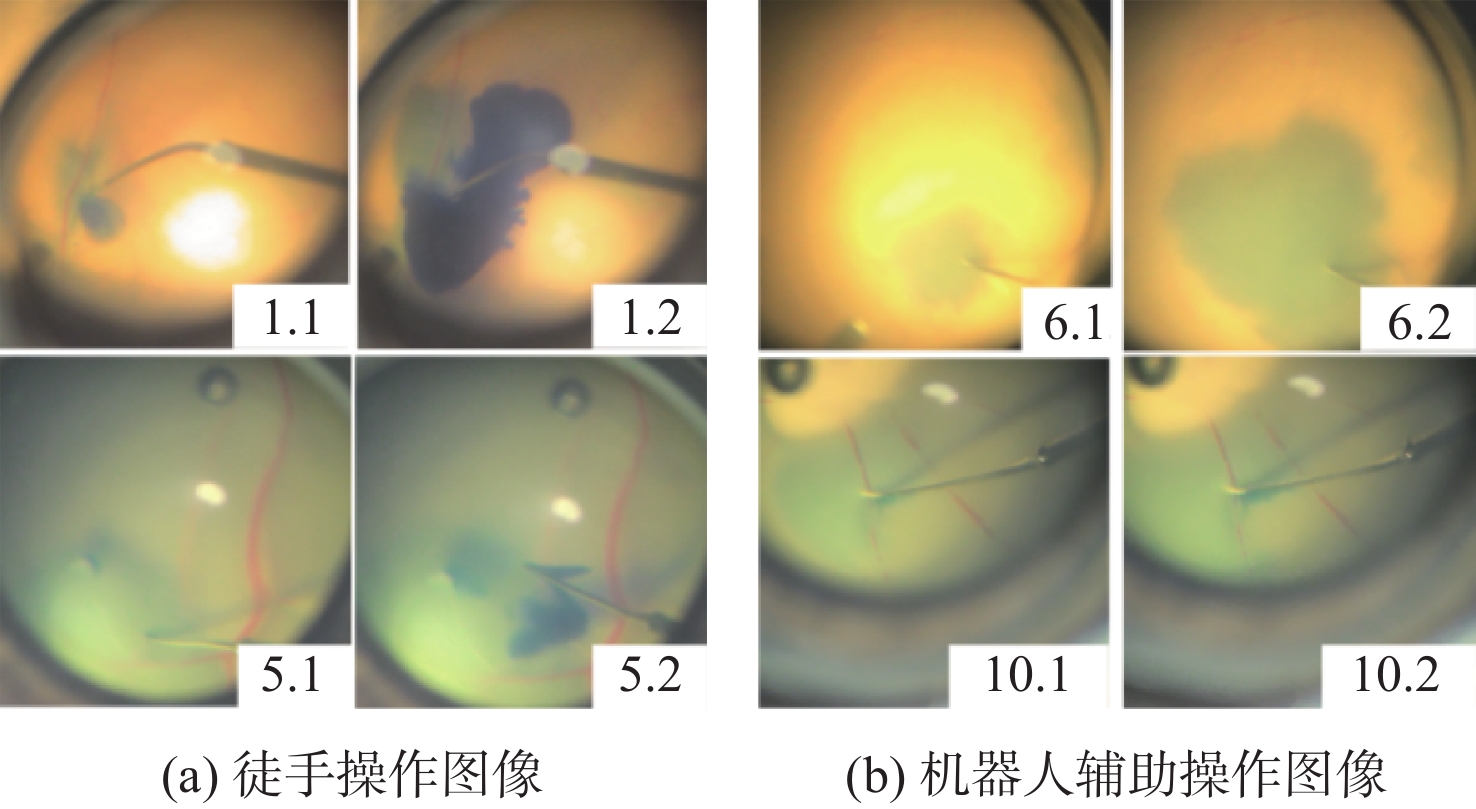
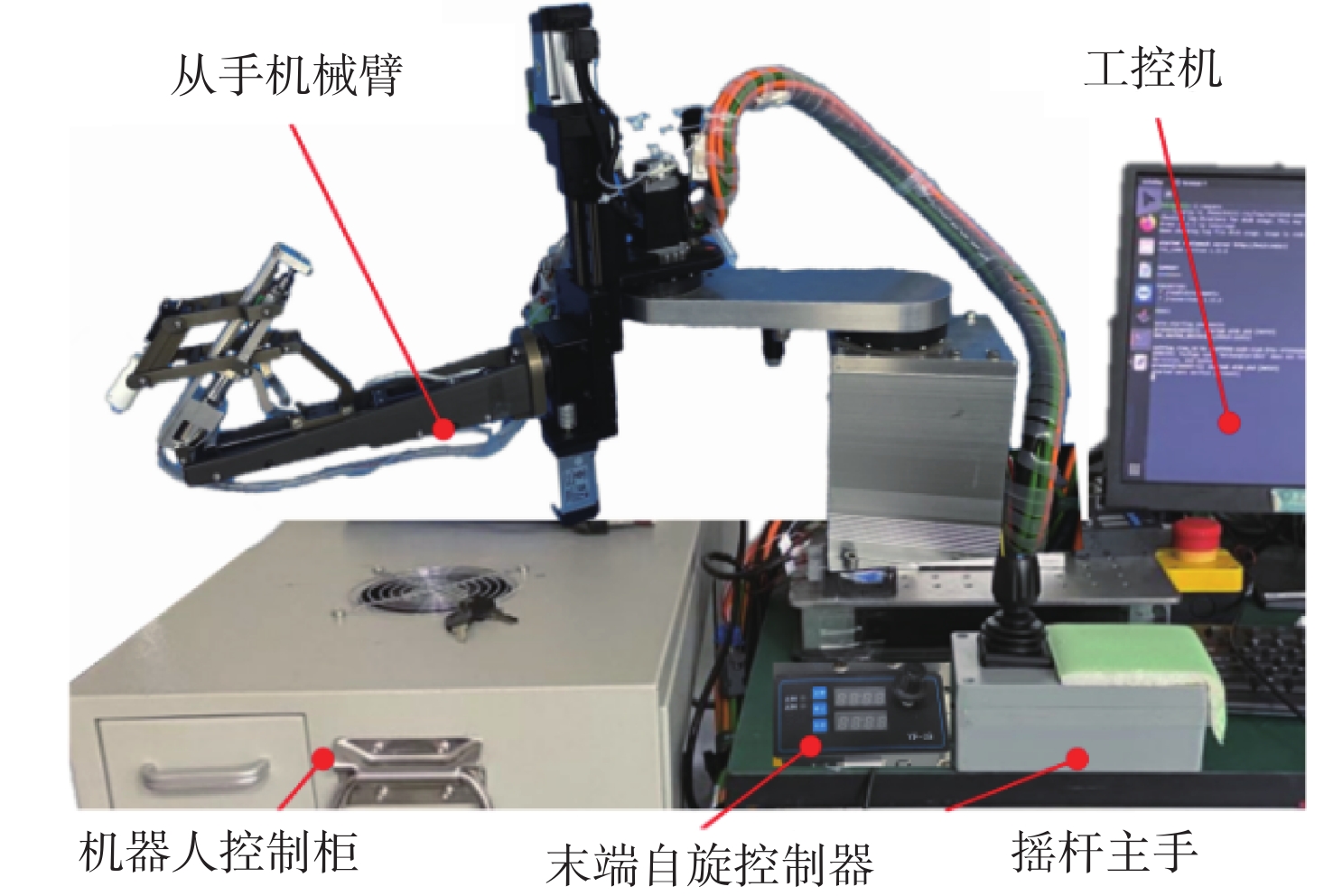
Subretinal injection of human embryonic stem cells is an effective procedure for treating retinal degeneration, which imposes high demands on the precision, stability, and safety of the surgical procedure. To address these challenges, a robot-assisted retinal surgery system based on a master-slave control approach is proposed. The system utilizes a master robot to control a slave robot during the subretinal injection operation. By constructing the direct and inverse kinematic models of the slave robot, the precise motion requirements for the subretinal injection are determined. Additionally, the system incorporates the concept of the remote center of motion (RCM) to adjust the position of the surgical instruments during remote motion. A velocity mapping model is derived to facilitate the adjustment of the RCM point, state transitions, and separation process during the procedure.The validation of the system’s accuracy and stability is conducted through ex vivo porcine eyeball subretinal puncture injection experiments, simulating the conditions of intraocular surgery. The results demonstrate that the robot-assisted system exhibits stable needle maintenance and precise motion, indicating its superiority over manual procedures in terms of reducing trauma to the retina and achieving more stable injections. This technology represents a advancement in microsurgery techniques, enhancing the precision and safety of subretinal injection procedures for the treatment of retinal degeneration.

| [1] |
MILLER J W, D’ANIERI L L, HUSAIN D, et al. Age-related macular degeneration (AMD): A view to the future[J]. Journal of Clinical Medicine, 2021, 10(5): 1124. doi: 10.3390/jcm10051124
|
| [2] |
HANDA J T, RICKMAN C B, DICK A D, et al. A systems biology approach towards understanding and treating non-neovascular age-related macular degeneration[J]. Nature Communications, 2019, 10(1): 106-116. doi: 10.1038/s41467-018-08036-6
|
| [3] |
ZHU J, LAMBA D A. Small molecule-based retinal differentiation of human embryonic stem cells and induced pluripotent stem cells[J]. Bio-Protocol, 2018, 8(12): e2882.
|
| [4] |
SHIRAI H, MANDAI M, MATSUSHITA K, et al. Transplantation of human embryonic stem cell-derived retinal tissue in two primate models of retinal degeneration[J]. Proceedings of the National Academy of Sciences of the United States of America, 2016, 113(1): 81-90.
|
| [5] |
YE K, TAKEMOTO Y, ITO A, et al. Reproducible production and image-based quality evaluation of retinal pigment epithelium sheets from human induced pluripotent stem cells[J]. Scientific Reports, 2020, 10(1): 1748-1760. doi: 10.1038/s41598-020-58656-6
|
| [6] |
CHAO J R, LAMBA D A, KLESERT T R, et al. Transplantation of human embryonic stem cell-derived retinal cells into the subretinal space of a non-human primate[J]. Translational Vision Science & Technology, 2017, 6(3): 4.
|
| [7] |
HE C Y, YANG Y. Multipoint force-constrained admittance control for retinal surgical robot[J]. Journal of Mechanical Engineering, 2021, 57(9): 12-18. doi: 10.3901/JME.2021.09.012
|
| [8] |
XIAO J J, YANG Y, SHEN L J, et al. A robotic system for retinal vascular bypass surgery[J]. Robot, 2014, 36(3): 293-299(in Chinese).
|
| [9] |
HE C Y, YANG Y, LIANG Q F, et al. Applications and research progress of robot assisted eye surgery[J]. Robot, 2019, 41(2): 265-275(in Chinese).
|
| [10] |
ÜNERI A, BALICKI M A, HANDA J, et al. New steady-hand eye robot with micro-force sensing for vitreoretinal surgery[C]//2010 3rd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics. Piscataway: IEEE Press, 2010: 814-819.
|
| [11] |
HE X C, ROPPENECKER D, GIERLACH D, et al. Toward clinically applicable steady-hand eye robot for vitreoretinal surgery[C]// Proceedings of ASME 2012 International Mechanical Engineering Congress and Exposition. New York: ASME, 2013: 145-153.
|
| [12] |
EDWARDS T L, XUE K, MEENINK H C M, et al. First-in-human study of the safety and viability of intraocular robotic surgery[J]. Nature Biomedical Engineering, 2018, 2(9): 649-656. doi: 10.1038/s41551-018-0248-4
|
| [13] |
GIJBELS A, SMITS J, SCHOEVAERDTS L, et al. In-human robot-assisted retinal vein cannulation, D world first[J]. Annals of Biomedical Engineering, 2018, 46(10): 1676-1685. doi: 10.1007/s10439-018-2053-3
|
| [14] |
GIJBELS A, WILLEKENS K, ESTEVENY L, et al. Towards a clinically applicable robotic assistance system for retinal vein cannulation[C]//2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics. Piscataway: IEEE Press, 2016: 284-291.
|
| [15] |
SU P, DENG S J, HUANG L, et al. Analysis and evaluation of a robotic trephination in penetrating keratoplasty[J]. Journal of Medical Devices, 2016, 10(2): 024503. doi: 10.1115/1.4032869
|
| [16] |
XIAO J J, HUANG L, SHEN L J, et al. Design and research of a robotic aided system for retinal vascular bypass surgery[J]. Journal of Medical Devices, 2014, 8(4): 044501. doi: 10.1115/1.4027230
|
| [17] |
HE C Y, HUANG L, YANG Y, et al. Research and realization of a master-slave robotic system for retinal vascular bypass surgery[J]. Chinese Journal of Mechanical Engineering, 2018, 31(1): 1-10. doi: 10.1186/s10033-018-0219-4
|
| [18] |
HUANG L, YANG Y, SU P, et al. Type synthesis of 1R1T remote center of motion mechanisms[J]. Journal of Mechanical Engineering, 2015, 51(13): 131-136(in Chinese). doi: 10.3901/JME.2015.13.131
|
| [19] |
SCRUGGS B A, JIAO C H, CRANSTON C M, et al. Optimizing donor cellular dissociation and subretinal injection parameters for stem cell-based treatments[J]. Stem Cells Translational Medicine, 2019, 8(8): 797-809. doi: 10.1002/sctm.18-0210
|
| [20] |
SINGH S P N, RIVIERE C N. Physiological tremor amplitude during retinal microsurgery[C]//Proceedings of the IEEE 28th Annual Northeast Bioengineering Conference. Piscataway: IEEE Press, 2002: 171-172.
|
Figures(17) / Tables(3)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: