| Citation: | LIU S D,LIU Y H,SUN Y M,et al. Small object detection in UAV aerial images based on inverted residual attention[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(3):514-524 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0362

|
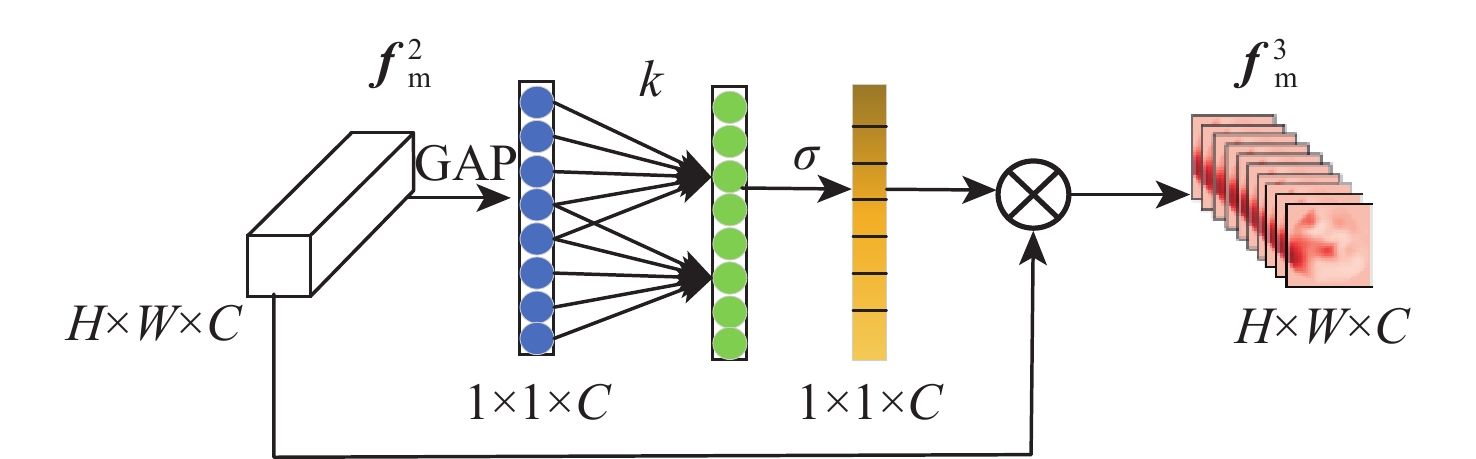
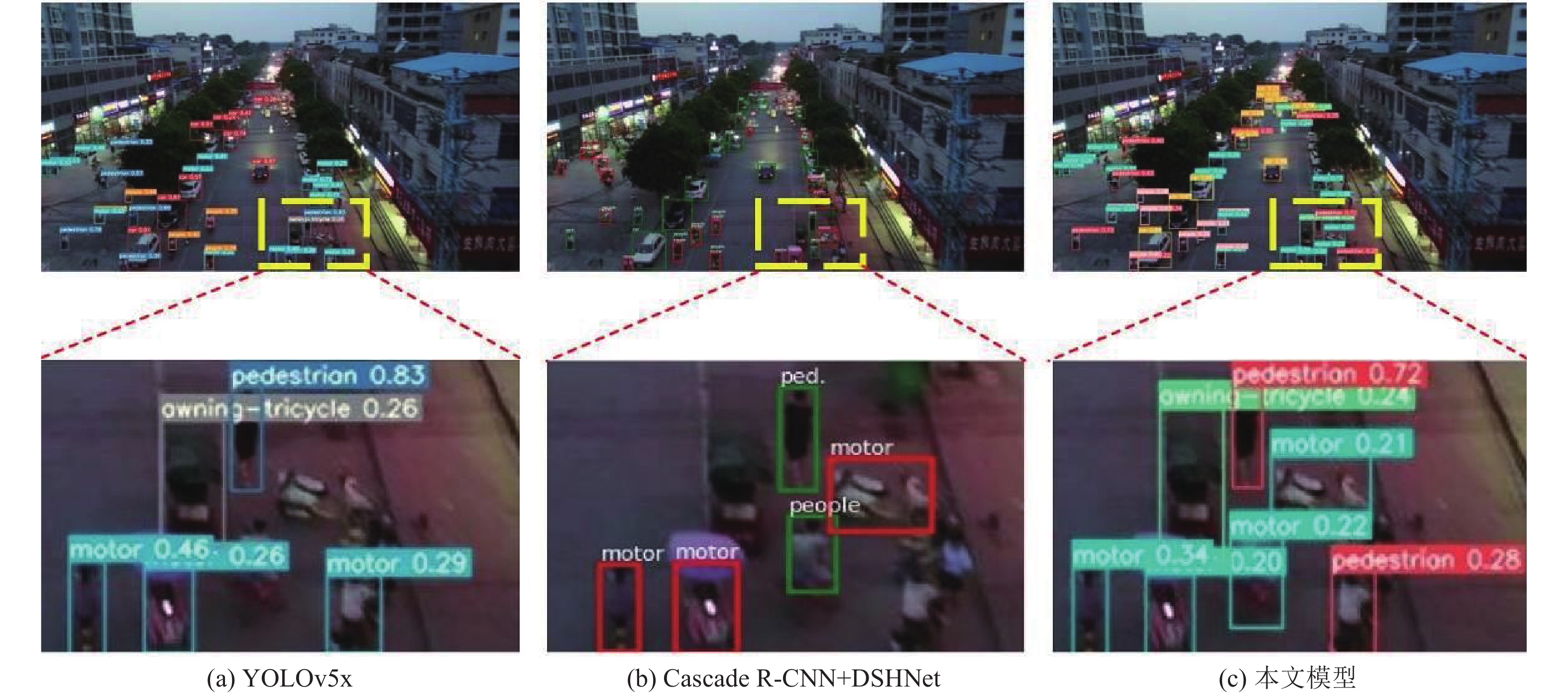
Aiming at the problems of complex background and too many small-size targets in UAV aerial images, a small target detection algorithm based on inverted residual attention is proposed. Firstly, an inverted residual module and an inverted residual attention module are embedded into the backbone network, while rich spatial information and deep semantic information of small targets are obtained by feature information mapping from low dimension to high dimension, thus improving the accuracy of small target detection; Secondly, in feature fusion, a multi-scale feature fusion module is established to fuse the shallow spatial information and deep semantic information, and to generate four detection heads with different sensory fields, which improves the recognition of small-size targets and reduces missed detection of small targets; Finally, a mosaic mixed data enhancement method is designed to establish the linear relationship between the data, increase the complexity of the image background and improve the robustness of the algorithm. The experimental results on data set VisDrone show that the mean average precision of this algorithm is 1.2% higher than that of DSHNet, which means that the proposed algorithm could effectively reduce missed detection and false detection of small targets in UAV aerial images.

| [1] |
WU X, LI W, HONG D, et al. Deep learning for UAV-based object detection and tracking: A survey[EB/OL]. (2021-10-25)[2022-05-01].https://arxiv.org/abs/2110.12638.
|
| [2] |
GIRSHICK R, DONAHUE J, DARRELL T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2014: 580-587.
|
| [3] |
GIRSHICK R. Fast R-CNN[C]//Proceedings of the IEEE International Conference on Computer Vision. Piscataway: IEEE Press, 2015: 1440-1448.
|
| [4] |
REN S Q, HE K M, GIRSHICK R, et al. Faster R-CNN: Towards real-time object detection with region proposal networks[C]//Proceedings of the 28th International Conference on Neural Information Processing Systems. Piscataway: IEEE Press, 2015: 91-99.
|
| [5] |
HE K, GKIOXARI G, DOLLÁR P, et al. Mask R-CNN[C]//Proceedings of the IEEE International Conference on Computer Vision. Piscataway: IEEE Press, 2017: 2961-2969.
|
| [6] |
CAI Z, VASCONCELOS N. Cascade R-CNN: Delving into high quality object detection[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2018: 6154-6162.
|
| [7] |
REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: Unified, real time object detection[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2016: 779-788.
|
| [8] |
REDMON J, FARHADI A. YOLO9000: Better, faster, stronger[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2017: 7263-7271.
|
| [9] |
REDMON J, FARHADI A. YOLOv3: An incremental improvement[EB/OL]. (2018-04-08)[2022-05-01].https://arxiv.org/abs/1804.02767.
|
| [10] |
BOCHKOVSKIY A, WANG C Y, LIAO H Y M. YOLOv4: Optimal speed and accuracy of object detection[EB/OL]. (2020-04-23)[2022-05-01].https://arxiv.org/abs/2004. 10934?sid=NDAqzT.
|
| [11] |
LIU W, ANGUELOV D, ERHAN D, et al. SSD: Single shot multibox detector[C]//Proceedings of the European Conference on Computer Vision. Berlin: Springer, 2016: 21-37.
|
| [12] |
LIN T Y, GOYAL P, GIRSHICK R, et al. Focal loss for dense object detection[C]//Proceedings of the IEEE International Conference on Computer Vision. Piscataway: IEEE Press, 2017: 2980-2988.
|
| [13] |
LIU M, WANG X, ZHOU A, et al. UAV-YOLO: Small object detection on unmanned aerial vehicle perspective[J]. Sensors, 2020, 20(8): 2238. doi: 10.3390/s20082238
|
| [14] |
LIANG X, ZHANG J, ZHUO L, et al. Small object detection in unmanned aerial vehicle images using feature fusion and scaling-based single shot detector with spatial context analysis[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2019, 30(6): 1758-1770.
|
| [15] |
ZHANG P, ZHONG Y, LI X. SlimYOLOv3: Narrower, faster and better for real-time UAV applications[C]//Proceedings of the IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE Press, 2019: 37-45.
|
| [16] |
裴伟, 许晏铭, 朱永英, 等. 改进的 SSD 航拍目标检测方法[J]. 软件学报, 2019, 30(3): 738-758.
PEI W, XU Y M, ZHU Y Y, et al. The target detection method of aerial photography images with improved SSD[J]. Journal of Software, 2019, 30(3): 738-758(in Chinese).
|
| [17] |
刘婷婷, 苗华, 李琳, 等. 融合场景上下文的轻量级目标检测网络[J]. 激光与光电子学进展, 2021, 58(20): 127-135.
LIU T T, MIAO H, LI L, et al. Lightweight target detection network integrating scene context[J]. Laser & Optoelectronics Progress, 2021, 58(20): 127-135(in Chinese).
|
| [18] |
HOWARD A, SANDLER M, CHEN B, et al. Searching for mobileNetV3[C]//Proceedings of the IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE Press, 2019: 1314-1324.
|
| [19] |
TAN M, LE Q. EfficientNetV2: Smaller models and faster training[EB/OL](2021-06-23)[2022-05-01].https://arxiv.org/abs/2104.00298v2.
|
| [20] |
刘艳菊, 王秋霁, 赵开峰, 等. 基于卷积神经网络的热轧钢条表面实时缺陷检测[J]. 仪器仪表学报, 2021, 42(12): 211-219. doi: 10.19650/j.cnki.cjsi.J2108078
LIU Y J, WANG Q J, ZHAO K F, et al. Real-time defect detection of hot rolling steel bar based on convolution neural network[J]. Chinese Journal of Scientific Instrument, 2021, 42(12): 211-219(in Chinese). doi: 10.19650/j.cnki.cjsi.J2108078
|
| [21] |
周中, 张俊杰, 龚琛杰, 等. 基于深度语义分割的隧道渗漏水智能识别[J]. 岩石力学与工程学报, 2022, 41(10): 2082-2093. doi: 10.13722/j.cnki.jrme.2022.0016
ZHOU Z, ZHANG J J, GONG C J, et al. Automatic identification of tunnel leakage based on deep semantic segmentation[J]. Chinese Journal of Rock Mechanics and Engineering, 2022, 41(10): 2082-2093(in Chinese). doi: 10.13722/j.cnki.jrme.2022.0016
|
| [22] |
WANG Q, WU B, ZHU P, et al. ECA-Net: Efficient channel attention for deep convolutional neural networks[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2020: 11534-11542.
|
| [23] |
HOWARD A G, ZHU M, CHEN B, et al. MobileNets: Efficient convolutional neural networks for mobile vision applications[EB/OL]. (2017-04-17)[2022-05-01].https://arxiv.org/abs/1704.04861.
|
| [24] |
HUANG G, SUN Y, LIU Z, et al. Deep networks with stochastic depth[C]//Proceedings of the European Conference on Computer Vision. Berlin: Springer, 2016: 646-661.
|
| [25] |
ZHANG H, CISSE M, DAUPHIN Y N, et al. Mixup: Beyond empirical risk minimization[EB/OL]. (2018-04-27)[2022-05-01].https://arxiv.org/abs/1710.09412.
|
| [26] |
ZHANG X, IZQUIERDO E, CHANDRAMOULI K. Dense and small object detection in UAV vision based on cascade network[C]//Proceedings of the IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE Press, 2019: 118-126.
|
| [27] |
WANG T, LI Y, KANG B, et al. The devil is in classification: A simple framework for long-tail instance segmentation[C]//Proceedings of the European Conference on Computer Vision. Berlin: Springer, 2020: 728-744.
|
| [28] |
LI Y, WANG T, KANG B, et al. Overcoming classifier imbalance for long-tail object detection with balanced group softmax[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2020: 10991-11000.
|
| [29] |
YU W P, YANG T J N, CHEN C. Towards resolving the challenge of long-tail distribution in UAV images for object detection[C]//Proceedings of the 2021 IEEE Winter Conference on Applications of Computer Vision. Piscataway: IEEE Press, 2021: 3258-3267.
|

Figures(11) / Tables(3)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: