| Citation: | ZUO L,ZHANG X L,LI Z Y,et al. UAV control law design method based on active-disturbance rejection control[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(5):1512-1522 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0488

|
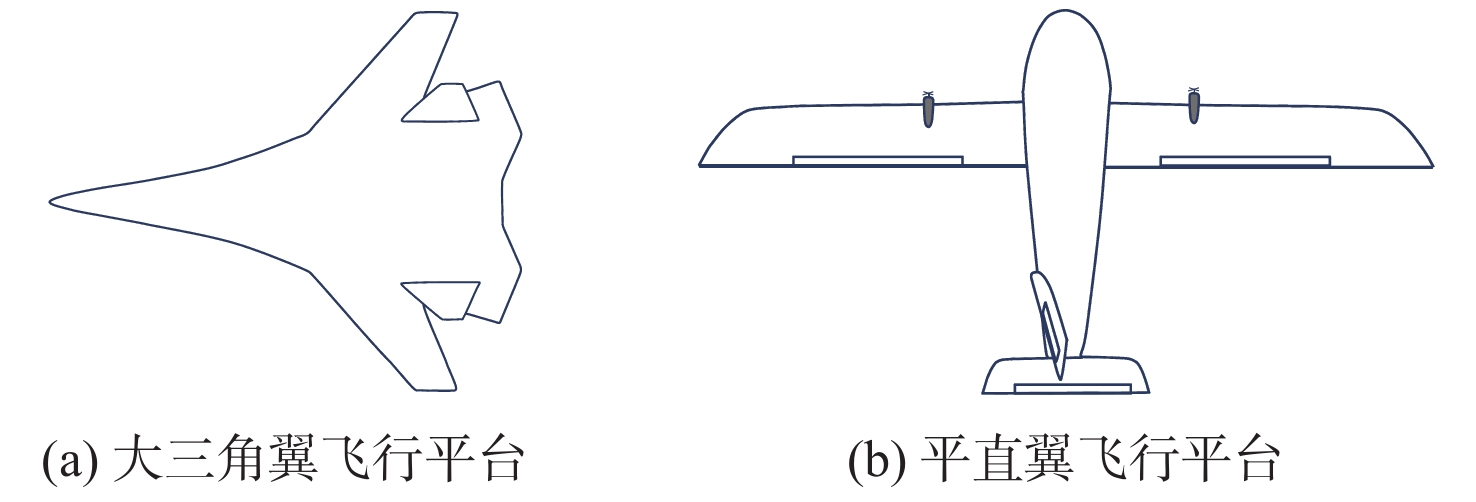
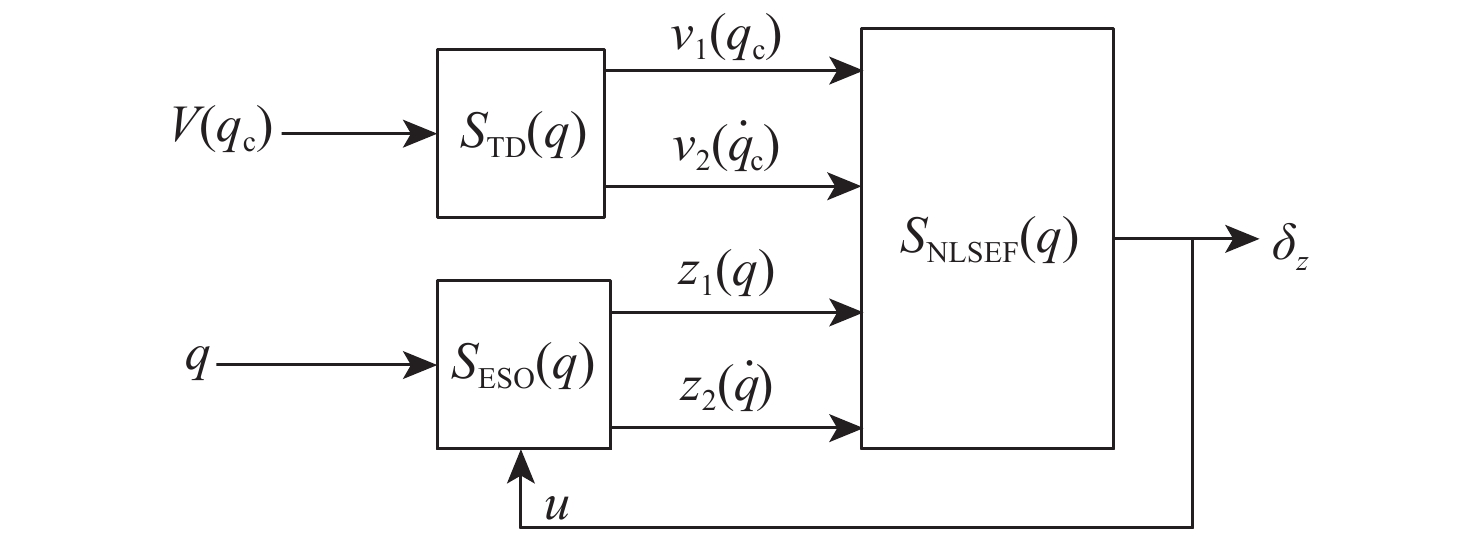
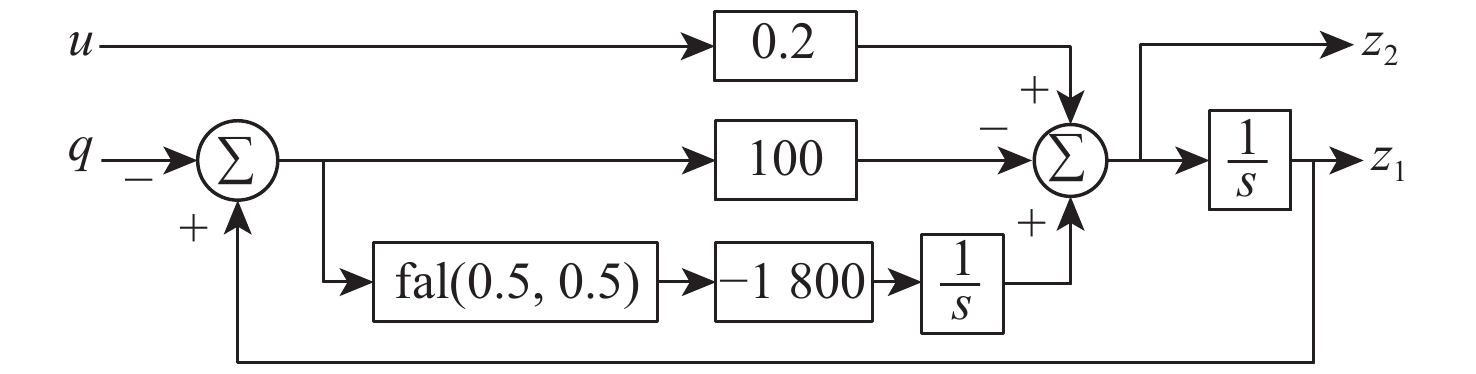
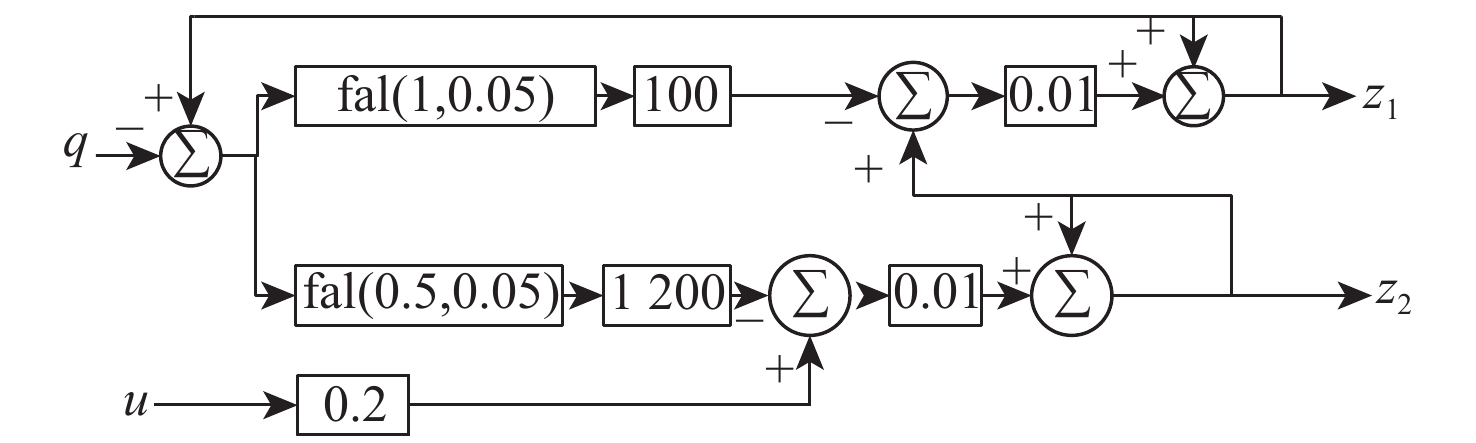
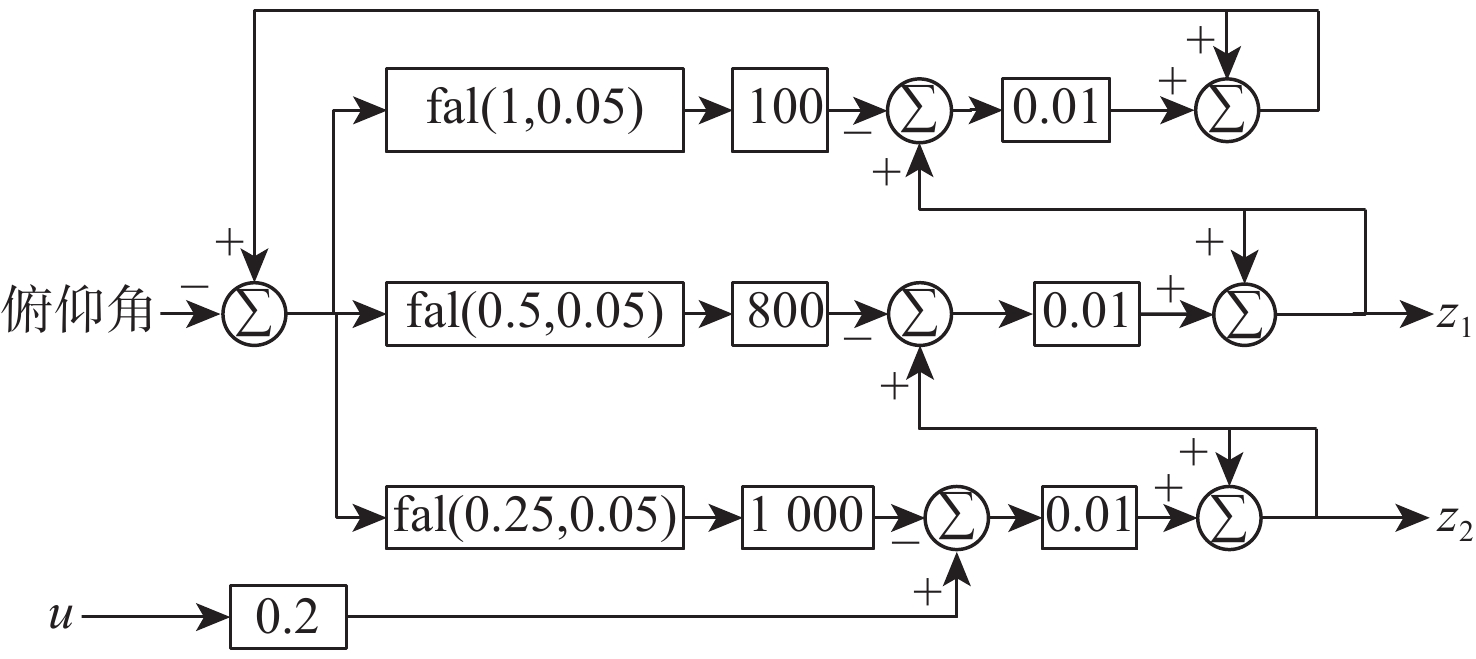
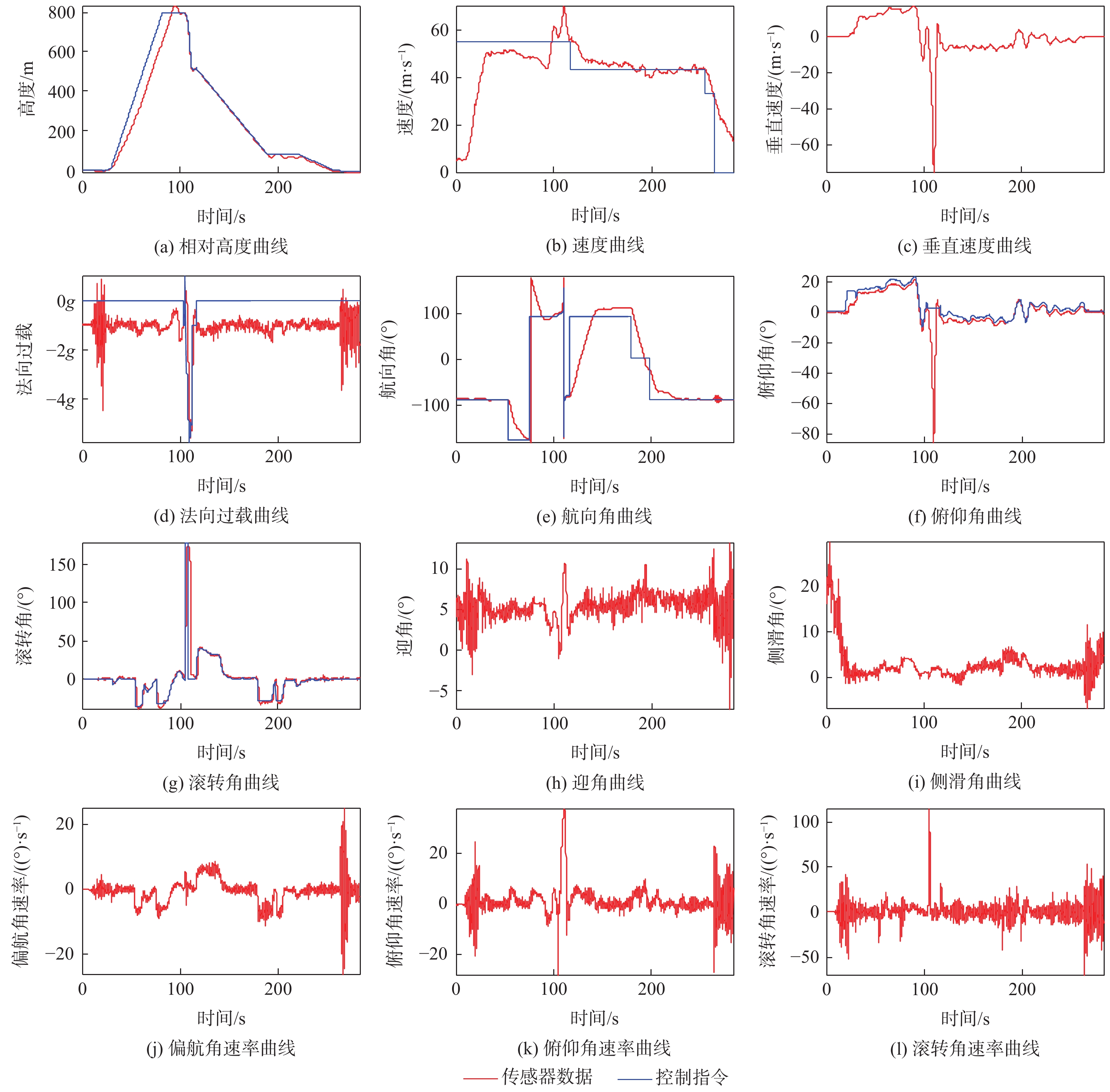
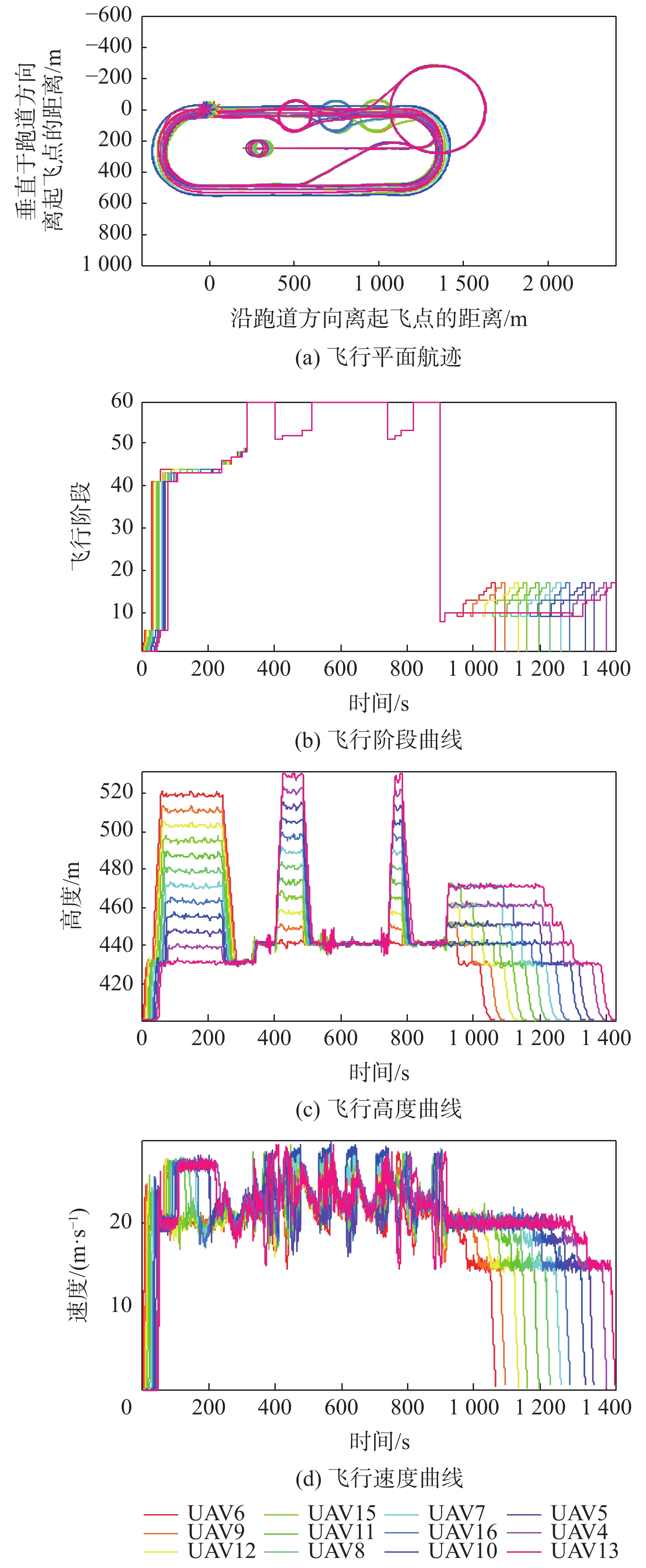
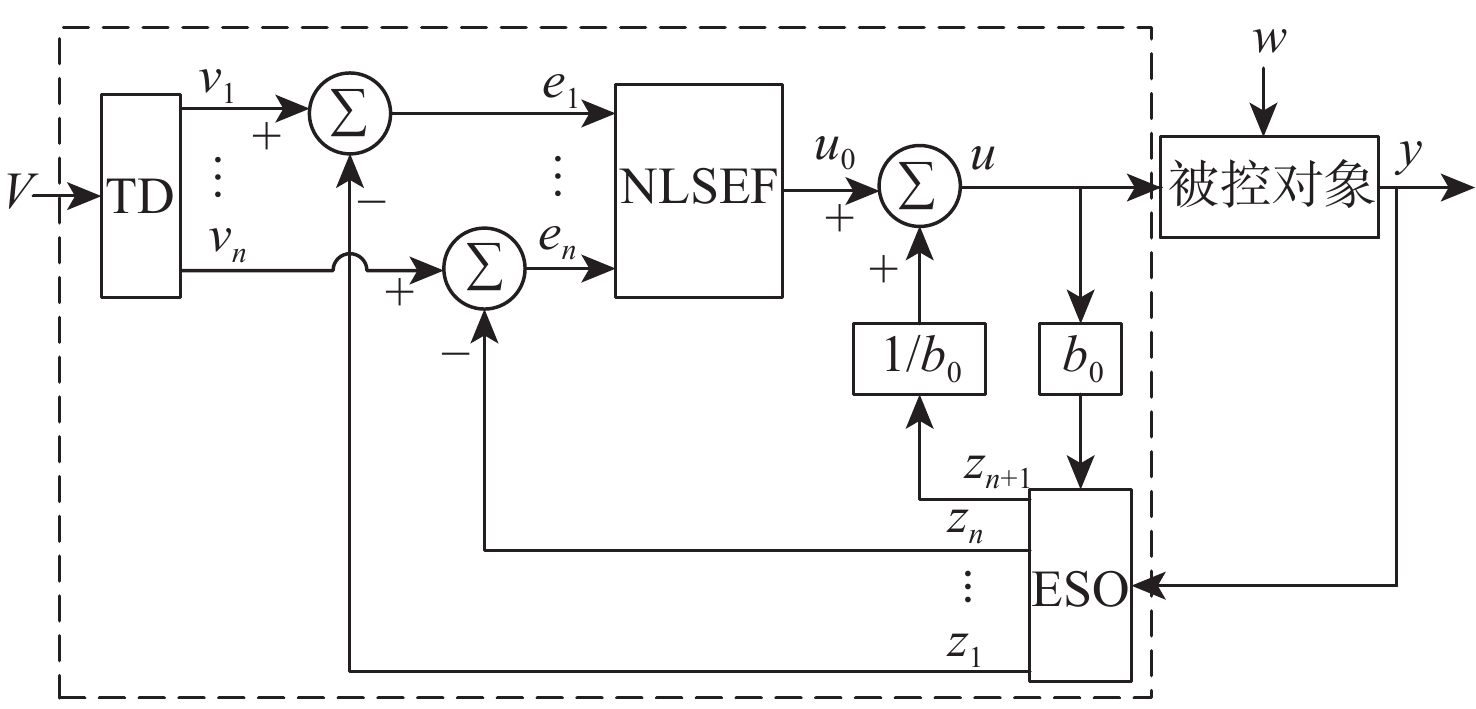
To provided a fast solution to multi-UAV and multi-task flight control law design, this paper presents a control law structure based on the active-disturbance rejection control method, and designs a reusable extended state observer and tracking differentiator. Meanwhile, the application of this method to three different UAV platforms is introduced. Then, the agility evaluation tests, the maneuver flight tests and the multi-UAV formation flight tests were carried out respectively. As a result, the 7000 kg supersonic UAV_A obtained better agility than the target plane; the 60 kg UAV_B successfully completed the 5.8

| [1] |
韩京清. 自抗扰控制技术: 估计补偿不确定因素的控制技术[M]. 北京: 国防工业出版社, 2008.
HAN J Q. Active disturbance rejection control technique[M]. Beijing: National Defense Industry Press, 2008(in Chinese).
|
| [2] |
朱斌. 自抗扰控制入门[M]. 北京: 北京航空航天大学出版社, 2017.
ZHU B. Introduction to active disturbance rejection control[M]. Beijing: Beihang University Press, 2017(in Chinese).
|
| [3] |
孙明玮, 马建顺, 朴敏楠, 等. 高超声速飞行器自抗扰控制方法[M]. 北京: 科学出版社, 2018.
SUN M W, MA J S, PIAO M N, et al. Active disturbance rejection control method for hypersonic vehicle [M]. Beijing: Science Press, 2018(in Chinese).
|
| [4] |
赵志良. 自抗扰控制设计与理论分析[M]. 北京: 科学出版社, 2022.
ZHAO Z L. Active disturbance rejection control design and theoretical analysis[M]. Beijing: Science Press, 2022(in Chinese).
|
| [5] |
GAO Z Q. Scaling and bandwidth-parameterization based controller-tuning[C]//Proceedings of the 2003 American Control Conference. Piscataway: IEEE Press, 2003: 4989-4996.
|
| [6] |
TIAN G, GAO Z Q. Benchmark tests of active disturbance rejection control on an industrial motion control platform[C]//Proceedings of the 2009 American Control Conference. Piscataway: IEEE Press, 2009: 5552-5557.
|
| [7] |
ZHENG Q, GAO L, GAO Z Q. On stability analysis of active disturbance rejection control for nonlinear time-varying plants with unknown dynamics [C]//Proceedings of the 46th IEEE Conference on Decision and Control. Piscataway: IEEE Press, 2007: 3501-3506.
|
| [8] |
高志强. 自抗扰控制思想探究[J]. 控制理论与应用, 2013, 30(12): 1498-1509. doi: 10.7641/CTA.2013.31087
GAO Z Q. On the foundation of active disturbance rejection control[J]. Control Theory & Applications, 2013, 30(12): 1498-1509(in Chinese). doi: 10.7641/CTA.2013.31087
|
| [9] |
ZHANG B, ZHU X P, ZHOU Z, et al. Design of nonlinear flight control law for a tailless unmanned aerial vehicle [C]//Proceedings of the IEEE International Conference of IEEE Region 10. Piscataway: IEEE Press, 2013: 1-4.
|
| [10] |
薛文超, 黄朝东, 黄一. 飞行制导控制一体化设计方法综述[J]. 控制理论与应用, 2013, 30(1): 1511-1520.
XUE W C, HUANG C D, HUANG Y. Design methods for the integrated guidance and control system[J]. Control Theory & Applications, 2013, 30(1): 1511-1520(in Chinese).
|
| [11] |
张波, 周洲, 祝小平. 自抗扰实现飞翼布局无人机全包线飞行控制[J]. 控制理论与应用, 2015, 32(10): 1370-1377.
ZHANG B, ZHOU Z, ZHU X P. Practical active disturbance rejection solution to a fly wing UAV flight control within full envelope[J]. Control Theory & Applications, 2015, 32(10): 1370-1377(in Chinese).
|
| [12] |
刘基玉, 刘林, 樊战旗. 改进 ADRC 及其在飞行增稳控制中的应用[J]. 飞行力学, 2010, 28(3): 35-38.
LIU J Y, LIU L, FAN Z Q. Improved ADRC and its application in flight control augmentation[J]. Flight Dynamics, 2010, 28(3): 35-38(in Chinese).
|
| [13] |
石嘉, 裴忠才, 唐志勇, 等. 改进型自抗扰四旋翼无人机控制系统设计与实现[J]. 北京航空航天大学学报, 2021, 47(9): 1823-1831.
SHI J, PEI Z C, TANG Z Y, et al. Design and realization of an improved active disturbance rejection quadrotor UAV control system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(9): 1823-1831(in Chinese).
|
| [14] |
崔乃刚, 张亮, 韦常柱, 等. 可重复使用运载器大姿态机动自抗扰控制[J]. 中国惯性技术学报, 2017, 25(3): 387-394.
CUI N G, ZHANG L, WEI C Z, et al. Active disturbance rejection control for reusable launch vehicle with large attitude maneuver[J]. Journal of Chinese Inertial Technology, 2017, 25(3): 387-394(in Chinese).
|
| [15] |
SUN M, WANG Z H, CHEN Z Q. Practical solution to attitude control within wide envelope[J]. Aircraft Engineering and Aerospace Technology, 2014, 86(2): 117-128. doi: 10.1108/AEAT-10-2012-0167
|
Figures(21) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: