| Citation: | PAN C Z,HE G,LI Z J,et al. Adaptive filtered control for uncertain electro-hydraulic servo systems with time-varying output constraints[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(6):1819-1828 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0497

|
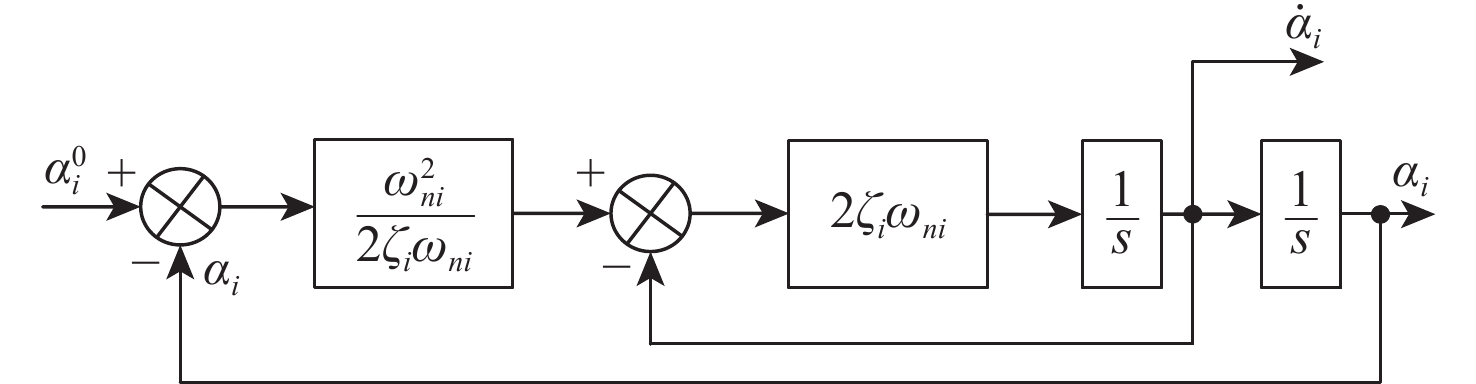
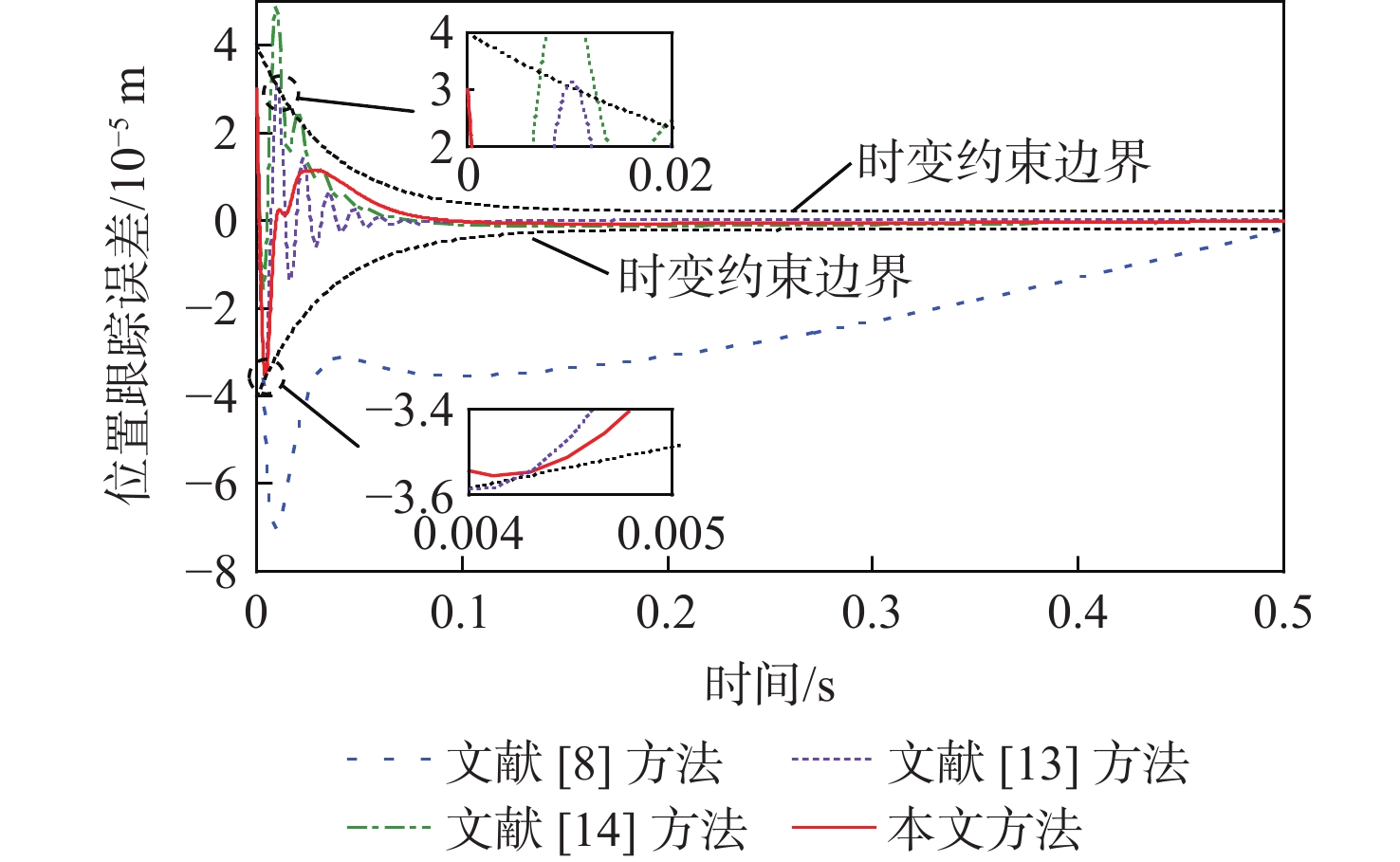
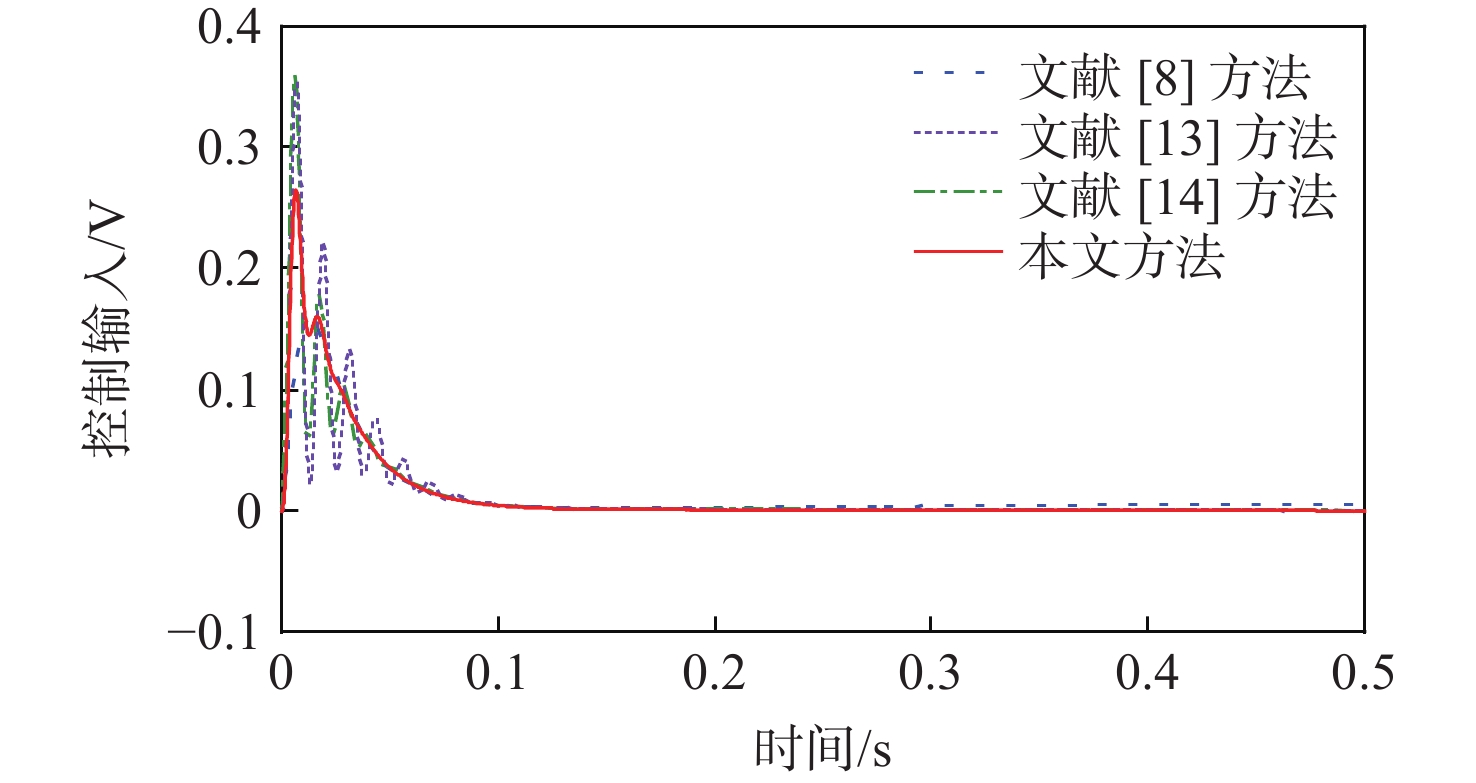
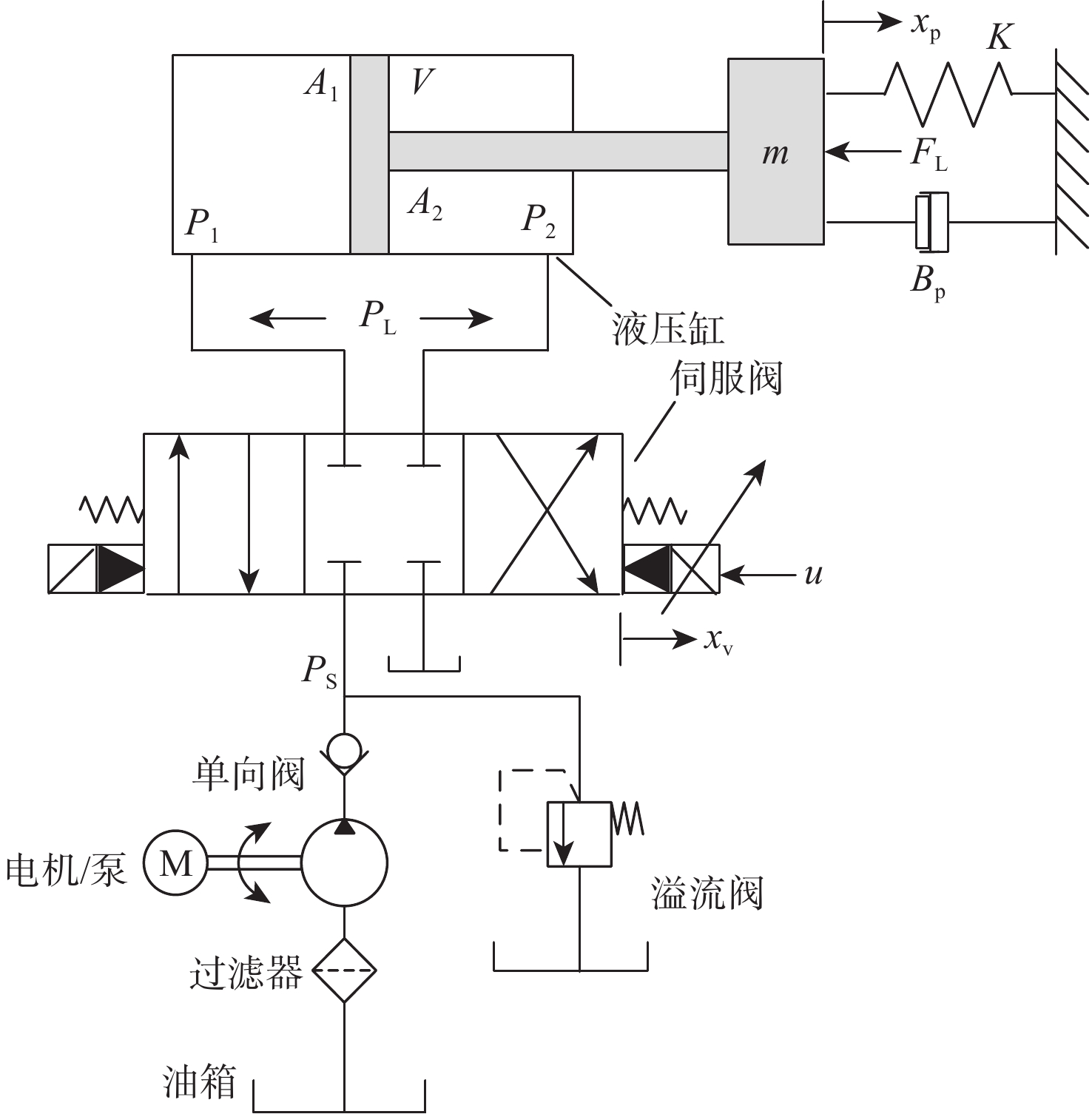
To address such problems as output constraints and uncertainties in the position tracking control of electro-hydraulic servo systems, an adaptive filter control method with output constrained was proposed based on the time-varying tangent barrier Lyapunov function. Firstly, a tangent barrier Lyapunov function with a time-varying constrained boundary was derived. By setting the parameters of the time-varying boundary function, the output of the system achieved good transient and steady performance.Secondly, a radial basis function (RBF) neural network and a weight adaptive learning law were designed to approximate the compound disturbance composed of model uncertainties and unknown disturbances online, and the approximate value was used for feedback control.Then, a second-order command filter backstepping method was used to design a state feedback control law and an error compensation mechanism, so as to avoid“computation explosion”in the backstepping design and eliminate the filtering error so that the position tracking accuracy of the system could be improved. Finally, the convergence of all error signals in a closed-loop system was proven by the Lyapunov stability theory. The simulation results show that the steady-state tracking error of the system under the proposed method is about 3.48×10−8 m.Compared with other control methods, the tracking error is always constrained within the time-varying constraint boundary, and control performance and tracking accuracy are both improved.

| [1] |
MACALUSO A, JACAZIO G. Prognostic and health management system for fly-by-wire electro-hydraulic servo actuators for detection and tracking of actuator faults[J]. Procedia CIRP, 2017, 59: 116-121. doi: 10.1016/j.procir.2016.09.016
|
| [2] |
郭新平, 汪成文, 刘华, 等. 基于扩张状态观测器的泵控电液伺服系统滑模控制[J]. 北京航空航天大学学报, 2020, 46(6): 1159-1168.
GUO X P, WANG C W, LIU H, et al. Extended-state-observer based sliding mode control for pump-controlled electro-hydraulic servo system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(6): 1159-1168(in Chinese).
|
| [3] |
刘华, 汪成文, 郭新平, 等. 电液负载敏感位置伺服系统自抗扰控制方法[J]. 北京航空航天大学学报, 2020, 46(11): 2131-2139.
LIU H, WANG C W, GUO X P, et al. Active disturbance rejection control method for position servo system based on electro-hydraulic load sensing[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(11): 2131-2139(in Chinese).
|
| [4] |
FENG H, MA W, YIN C B, et al. Trajectory control of electro-hydraulic position servo system using improved PSO-PID controller[J]. Automation in Construction, 2021, 127: 103722. doi: 10.1016/j.autcon.2021.103722
|
| [5] |
YUAN H B, NA H C, KIM Y B. System identification and robust position control for electro-hydraulic servo system using hybrid model predictive control[J]. Journal of Vibration and Control, 2018, 24(18): 4145-4159. doi: 10.1177/1077546317721417
|
| [6] |
ONDER M, BAYRAK A, AKSOY S. RISE-based backstepping control design for an electro-hydraulic arm system with parametric uncertainties[J]. International Journal of Control, 2022, 95(10): 2815-2827. doi: 10.1080/00207179.2021.1939164
|
| [7] |
YANG X B, ZHENG X L, CHEN Y H. Position tracking control law for an electro-hydraulic servo system based on backstepping and extended differentiator[J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(1): 132-140. doi: 10.1109/TMECH.2017.2746142
|
| [8] |
郭洪波, 李洪人. 基于Backstepping的阀控非对称缸电液伺服系统非线性控制[J]. 液压与气动, 2004(10): 38-40.
GUO H B, LI H R. Backstepping-based nonlinear control for asymmetric cylinder electro-hydraulic servo system[J]. Chinese Hydraulics & Pneumatics, 2004(10): 38-40(in Chinese).
|
| [9] |
MINTSA H A, VENUGOPAL R, KENNE J P, et al. Feedback linearization-based position control of an electrohydraulic servo system with supply pressure uncertainty[J]. IEEE Transactions on Control Systems Technology, 2012, 20(4): 1092-1099. doi: 10.1109/TCST.2011.2158101
|
| [10] |
WRAT G, BHOLA M, RANJAN P, et al. Energy saving and fuzzy-PID position control of electro-hydraulic system by leakage compensation through proportional flow control valve[J]. ISA Transactions, 2020, 101: 269-280. doi: 10.1016/j.isatra.2020.01.003
|
| [11] |
邵俊鹏, 王仲文, 李建英, 等. 电液位置伺服系统的规则自校正模糊PID控制器[J]. 中南大学学报(自然科学版), 2010, 41(3): 960-965.
SHAO J P, WANG Z W, LI J Y, et al. Rule self-tuning fuzzy-PID controller ofelectro-hydraulic position servo system[J]. Journal of Central South University (Science and Technology), 2010, 41(3): 960-965(in Chinese).
|
| [12] |
张震阳, 汪成文, 郭新平, 等. 基于ESO的电液位置伺服系统反步滑模控制[J]. 北京航空航天大学学报, 2022, 48(6): 1082-1090.
ZHANG Z Y, WANG C W, GUO X P, et al. Backstepping sliding mode control of electro hydraulic position servo system based on ESO[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(6): 1082-1090(in Chinese).
|
| [13] |
方一鸣, 石胜利, 李建雄, 等. 基于指令滤波的电液伺服系统自适应反步控制[J]. 电机与控制学报, 2013, 17(9): 105-110. doi: 10.3969/j.issn.1007-449X.2013.09.016
FANG Y M, SHI S L, LI J X, et al. Adaptive backstepping control for electro-hydraulic servo system with input saturation based on command filter[J]. Electric Machines and Control, 2013, 17(9): 105-110(in Chinese). doi: 10.3969/j.issn.1007-449X.2013.09.016
|
| [14] |
王广文, 姚建勇. 基于指令滤波的电液伺服系统输出反馈控制[J]. 上海交通大学学报, 2019, 53(12): 1482-1487.
WANG G W, YAO J Y. Output feedback control of electro-hydraulic servo systems with command filter[J]. Journal of Shanghai Jiao Tong University, 2019, 53(12): 1482-1487(in Chinese).
|
| [15] |
MA H F, LI Y M, XIONG Z H. Design of funnel function-based discrete-time sliding mode control[J]. IET Control Theory & Applications, 2020, 14(16): 2413-2418.
|
| [16] |
YANG X W, DENG W X, YAO J Y. Neural adaptive dynamic surface asymptotic tracking control of hydraulic manipulators with guaranteed transient performance[J]. IEEE Transactions on Neural Networks and Learning Systems, 2023, 34(10): 7339-7349. doi: 10.1109/TNNLS.2022.3141463
|
| [17] |
董振乐, 杨英浩, 姚建勇, 等. 匹配和不匹配干扰共存时电液伺服系统预设性能渐近跟踪控制[J]. 中国机械工程, 2022, 33(20): 2437-2443.
DONG Z L, YANG Y H, YAO J Y, et al. Asymptotic prescribedperformance tracking control of electro-hydraulic servo systems undermatched and unmatched disturbance[J]. China Mechanical Engineering, 2022, 33(20): 2437-2443(in Chinese).
|
| [18] |
LI Y M, TONG S C, LIU L, et al. Adaptive output-feedback control design with prescribed performance for switched nonlinear systems[J]. Automatica, 2017, 80: 225-231. doi: 10.1016/j.automatica.2017.02.005
|
| [19] |
NIE S C, QIAN L F, CHEN L M, et al. Barrier Lyapunov functions-based dynamic surface control with tracking error constraints for ammunition manipulator electro-hydraulic system[J]. Defence Technology, 2021, 17(3): 836-845. doi: 10.1016/j.dt.2020.04.010
|
| [20] |
王云飞, 赵继云, 满家祥, 等. 基于干扰观测器的状态受限多缸同步控制策略[J]. 华南理工大学学报(自然科学版), 2022, 50(2): 93-101.
WANG Y F, ZHAO J Y, MAN J X, et al. Multi-cylinder synchronization control strategy with state constraint based on disturbance observer[J]. Journal of South China University of Technology (Natural Science Edition), 2022, 50(2): 93-101(in Chinese).
|
| [21] |
GUO Q, LIU Y L, JIANG D, et al. Prescribed performance constraint regulation of electrohydraulic control based on backstepping with dynamic surface[J]. Applied Sciences, 2018, 8(1): 76. doi: 10.3390/app8010076
|
| [22] |
徐张宝, 朱忠领, 马大为, 等. 考虑状态约束的液压系统自适应控制[J]. 西安交通大学学报, 2017, 51(1): 97-102.
XU Z B, ZHU Z L, MA D W, et al. Adaptive control of hydraulic systems with state constraints[J]. Journal of Xi’an Jiaotong University, 2017, 51(1): 97-102(in Chinese).
|
| [23] |
GUO Q, LI X C, JIANG D. Full-state error constraints based dynamic surface control of electro-hydraulic system[J]. IEEE Access, 2018, 6: 53092-53101. doi: 10.1109/ACCESS.2018.2870956
|
| [24] |
YANG G C. Dual extended state observer-based backstepping control of electro-hydraulic servo systems with time-varying output constraints[J]. Transactions of the Institute of Measurement and Control, 2020, 42(5): 1070-1080. doi: 10.1177/0142331219883056
|
| [25] |
陈强, 丁科新, 南余荣. 带有输出约束的柔性关节机械臂预设性能自适应控制[J]. 控制与决策, 2021, 36(2): 387-394.
CHEN Q, DING K X, NAN Y R. Prescribed performance adaptive control of flexible-joint manipulators with output constraints[J]. Control and Decision, 2021, 36(2): 387-394(in Chinese).
|
| [26] |
姚文龙, 亓冠华, 池荣虎, 等. 具有未知负载扰动的水井钻机电液伺服系统无模型自适应控制[J]. 控制理论与应用, 2022, 39(2): 231-240.
YAO W L, QI G H, CHI R H, etal. Model-free adaptive control for water well drilling rig electro-hydraulic servo with unknown load disturbance[J]. Control Theory & Applications, 2022, 39(2): 231-240 (in Chinese).
|
| [27] |
叶小华, 岑豫皖, 赵韩, 等. 基于液压弹簧刚度的阀控非对称缸建模仿真[J]. 中国机械工程, 2011, 22(1): 23-27.
YE X H, CEN Y W, ZHAO H, et al. Modeling and simulation of hydraulic spring stiffness-based asymmetrical cylinder controlled by valve[J]. China Mechanical Engineering, 2011, 22(1): 23-27(in Chinese).
|
| [28] |
BESSA W M, DUTRA M S, KREUZER E. Sliding mode control with adaptive fuzzy dead-zone compensation of an electro-hydraulic servo-system[J]. Journal of Intelligent and Robotic Systems, 2010, 58(1): 3-16. doi: 10.1007/s10846-009-9342-x
|
| [29] |
GUANC, PAN S X. Adaptive sliding mode control of electro-hydraulic system with nonlinear unknown parameters[J]. Control Engineering Practice, 2008, 16(11): 1275-1284.
|
| [30] |
HARTMAN E J, KEELER J D, KOWALSKI J M. Layered neural networks with Gaussian hidden units as universal approximations[J]. Neural Computation, 1990, 2(2): 210-215. doi: 10.1162/neco.1990.2.2.210
|
| [31] |
PARK J, SANDBERG I. Universal approximation using radial-basis-function networks[J]. Neural Computation, 1991, 3(2): 246-257. doi: 10.1162/neco.1991.3.2.246
|
| [32] |
FARRELL J A, POLYCARPOU M, SHARMA M, et al. Command filtered backstepping[J]. IEEE Transactions on Automatic Control, 2009, 54(6): 1391-1395. doi: 10.1109/TAC.2009.2015562
|
| [33] |
DONG W J, FARRELL J A, POLYCARPOU M M, et al. Command filtered adaptive backstepping[J]. IEEE Transactions on Control Systems Technology, 2012, 20(3): 566-580. doi: 10.1109/TCST.2011.2121907
|
Figures(7) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: