| Citation: | ZHENG W M,XU Y,LUO D L. Fixed-time formation control of quadrotor UAV swarm with unknown disturbances[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(5):1702-1712 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0506

|
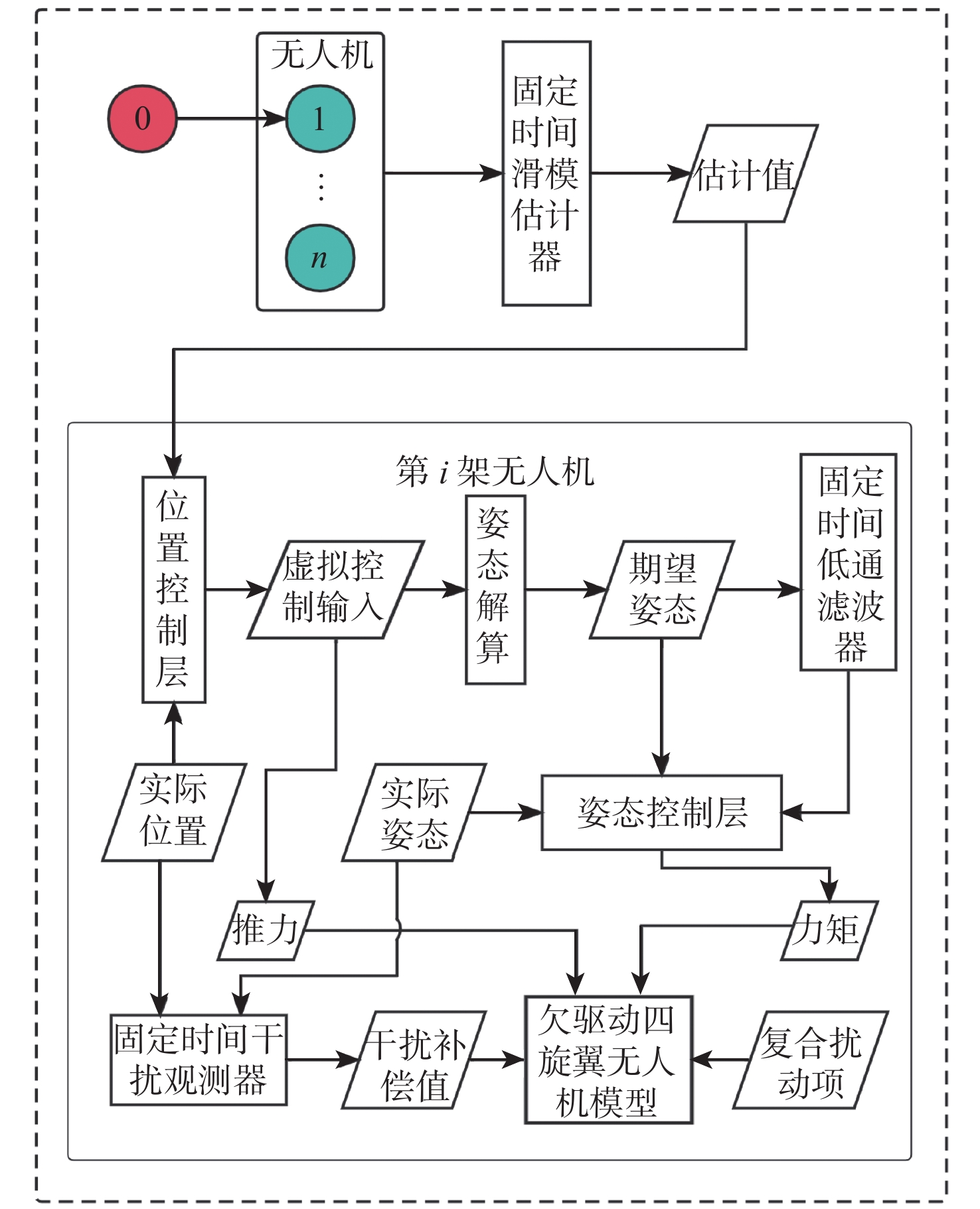
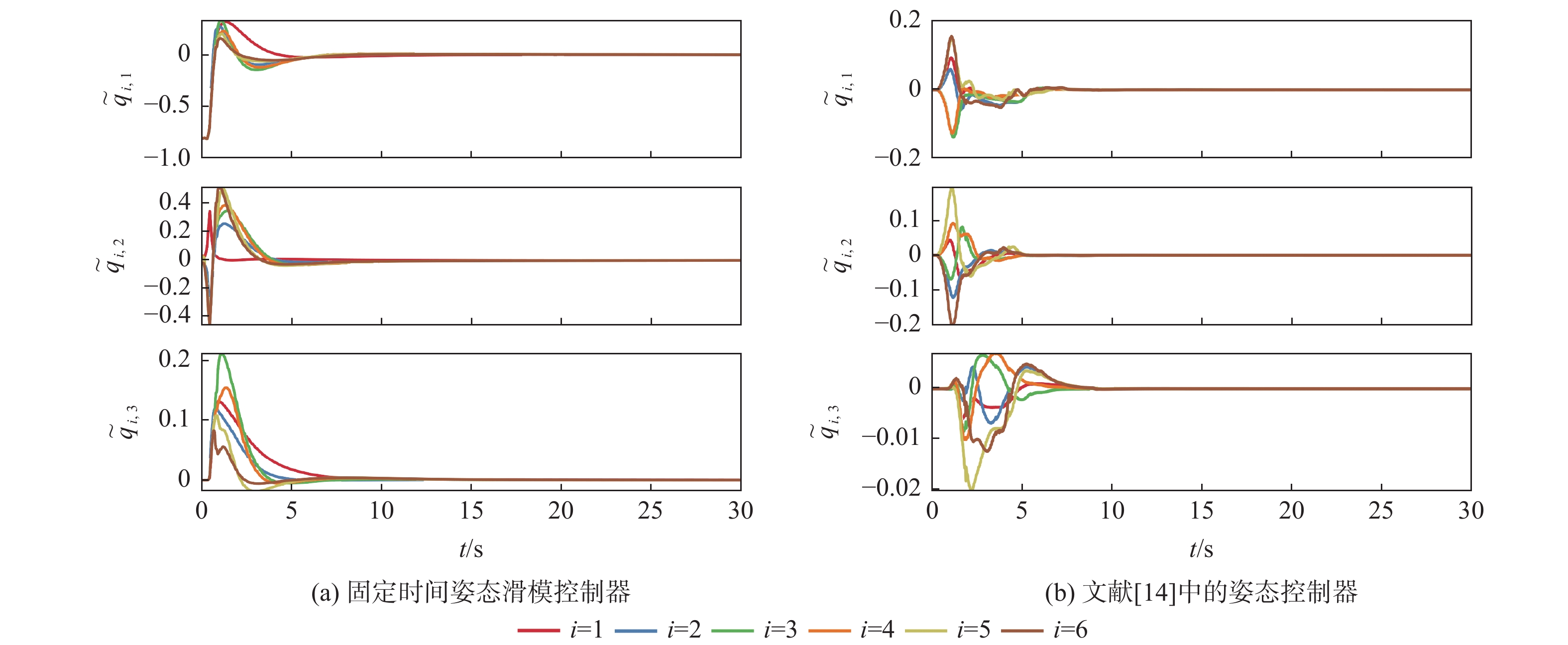
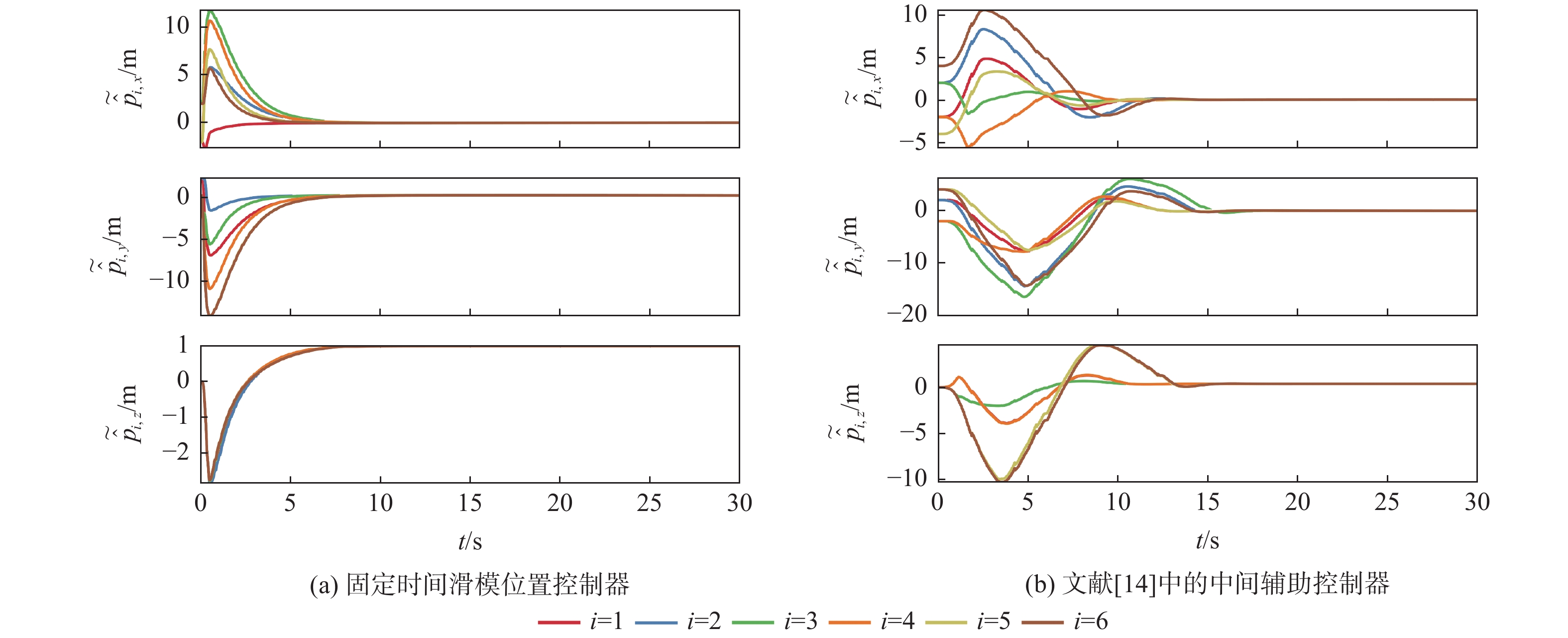
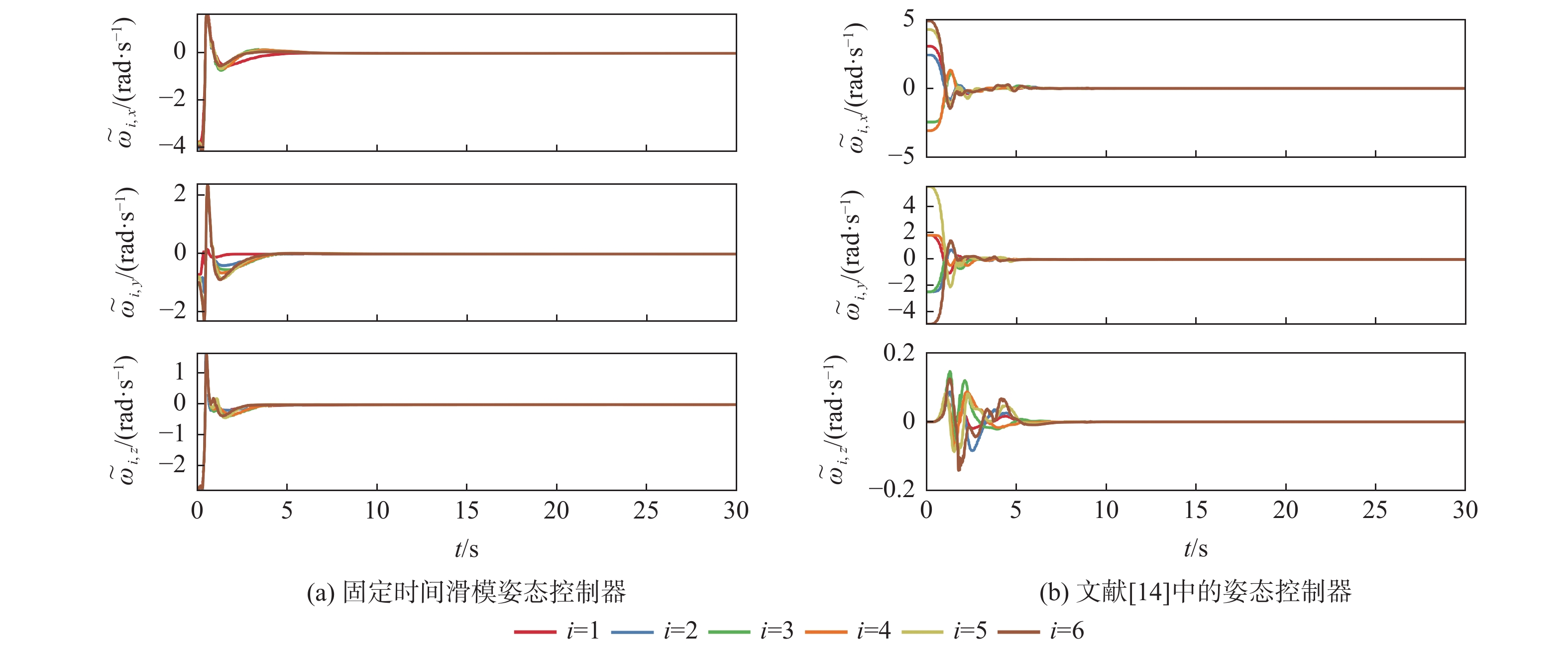
A fixed-time formation control approach is proposed for the formation control of underactuated nonlinear quadrotor UAV swarm with unknown disturbances. Firstly, a distributed fixed-time sliding mode estimator is designed. Each UAV can quickly estimate its own desired position information under the condition that only some UAVs can obtain the desired trajectory. Secondly,in order for the UAV to produce disturbance estimates to counteract the impact of the compound disturbances, a fixed-time disturbance observer is also inserted to estimate the unknown compound disturbances. Then, fixed-time sliding mode controllers are designed in the position layer and control layer of the UAV to track the desired trajectory. The proposed method can satisfy the attitude stability convergence. Finally, the accuracy and effectiveness of the proposed method are verified through numerical simulation.

| [1] |
段海滨, 申燕凯, 赵彦杰, 等. 2020年无人机热点回眸[J]. 科技导报, 2021, 39(1): 233-247.
DUAN H B, SHEN Y K, ZHAO Y J, et al. Review of technological hotspots of unmanned aerial vehicle in 2020[J]. Science & Technology Review, 2021, 39(1): 233-247(in Chinese).
|
| [2] |
任章, 郭栋, 董希旺, 等. 飞行器集群协同制导控制方法及应用研究[J]. 导航定位与授时, 2019, 6(5): 1-9.
REN Z, GUO D, DONG X W, et al. Research on the cooperative guidance and control method and application for aerial vehicle swarm systems[J]. Navigation Positioning and Timing, 2019, 6(5): 1-9(in Chinese).
|
| [3] |
徐力昊, 张宇, 许斌. 基于双向电机驱动的四旋翼机动飞行控制[J]. 北京航空航天大学学报, 2021, 47(2): 373-381.
XU L H, ZHANG Y, XU B. Maneuvering flight control of QUAV based on bi-directional motor actuation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(2): 373-381(in Chinese).
|
| [4] |
KENDOUL F, NONAMI K, FANTONI L, et al. An adaptive vision-based autopilot for mini flying machines guidance, navigation and control[J]. Autonomous Robots, 2009, 27(3): 165. doi: 10.1007/s10514-009-9135-x
|
| [5] |
CHEN M, HUZMEZAN M. A combined MBPC/ 2 DOF H∞ controller for a quad rotor UAV[C]//Proceedings of AIAA Guidance, Navigation, and Control Conference and Exhibit. Reston: AIAA, 2003: 1716-1721.
|
| [6] |
BOUABDALLAH S, NOTH A, SIEGWART R. PID vs LQ control techniques applied to an indoor micro quadrotor[C]//Proceedings of IEEE/RSJ International Conference on Intelligent Robots & Systems. Piscataway: IEEE Press, 2004: 2451-2456.
|
| [7] |
马思迁, 董朝阳, 马鸣宇, 等. 基于自适应通信拓扑四旋翼无人机编队重构控制[J]. 北京航空航天大学学报, 2018, 44(4): 841-850.
MA S Q, DONG C Y, MA M Y, et al. Formation reconfiguration control of quadrotor UAVs based on adaptive communication topology[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(4): 841-850(in Chinese).
|
| [8] |
EFE M O. Robust low altitude behavior control of a quadrotor rotorcraft through sliding modes[C]//Proceedings of Control & Automation, 2007. MED '07. Mediterranean Conference on. Piscataway: IEEE Press, 2007: 1162-1167.
|
| [9] |
GONZALEZ-HERNANDEZ I, PALACIOS F M, CRUZ S S, et al. Real-time altitude control for a quadrotor helicopter using a super-twisting controller based on high-order sliding mode observer[J]. International Journal of Advanced Robotic Systems, 2017, 14(1): 172988141668711.
|
| [10] |
SATICI A C, POONAWALA H A, SPONG M W. Robust Optimal Control of Quadrotor UAVs[J]. IEEE Access, 2013, 1: 79-93. doi: 10.1109/ACCESS.2013.2260794
|
| [11] |
REN W. Consensus strategies for cooperative control of vehicle formations[J]. IET Control Theory & Applications, 2007, 1(2): 505-512.
|
| [12] |
MOREAU L. Stability of multiagent systems with time-dependent communication links[J]. IEEE Transactions on Automatic Control, 2005, 50(2): 169-182. doi: 10.1109/TAC.2004.841888
|
| [13] |
朱旭, 张逊逊, 尤谨语, 等. 基于信息一致性的无人机紧密编队集结控制[J]. 航空学报, 2015, 36(12): 3919-3929.
ZHU X, ZHANG X X, YOU J Y, et al. Swarm control of UAV close formation based on information consensus[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(12): 3919-3929(in Chinese).
|
| [14] |
郑伟铭, 徐扬, 罗德林. 多四旋翼无人机系统分布式分层编队合围控制[J]. 北京航空航天大学学报, 2022, 48(6): 1091-1105.
ZHENG W M, XU Y, LUO D L. Distributed hierarchical formation-containment control of multiple quadrotor UAV systems[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(6): 1091-1105(in Chinese).
|
| [15] |
CHEN G, LEWIS F L, XIE L. Finite-time distributed consensus via binary control protocols[J]. Automatica, 2011, 47(9): 1962-1968. doi: 10.1016/j.automatica.2011.05.013
|
| [16] |
LIU X, LAM J, YU W, et al. Finite-time consensus of multiagent systems with a switching protocol[J]. IEEE Transactions on Neural Networks & Learning Systems, 2016, 27(4): 853-862.
|
| [17] |
POLYAKOV A. Nonlinear feedback design for fixed-time stabilization of linear control systems[J]. IEEE Transactions on Automatic Control, 2012, 57(8): 2106-2110. doi: 10.1109/TAC.2011.2179869
|
| [18] |
MENG D, JIA Y, Du J. Finite-time consensus for multiagent systems with cooperative and antagonistic interactions[J]. IEEE Transactions on Neural Networks and Learning Systems, 2016, 27(4): 762-770. doi: 10.1109/TNNLS.2015.2424225
|
| [19] |
HONG H, YU W, YU X, et al. Fixed-time connectivity-preserving distributed average tracking for multiagent systems[J]. IEEE Transactions on Circuits & Systems II Express Briefs, 2017, 64(10): 1192-1196.
|
| [20] |
NING B, ZUO Z, JIN J, et al. Distributed fixed-time coordinated tracking for nonlinear multi-agent systems under directed graphs[J]. Asian Journal of Control, 2018, 20(2): 646-658. doi: 10.1002/asjc.1612
|
| [21] |
SHUSTER M. A survey of attitude representations[J]. Journal of Astronautical Sciences, 1993, 41(4): 439-517.
|
| [22] |
LI W, LIU L, FENG G. Containment control with multiple leaders for nonlinear multi-agent systems with unstabilizable linearizations[J]. Neurocomputing, 2020, 380: 43-50. doi: 10.1016/j.neucom.2019.10.088
|
| [23] |
ZUO Z Y, TIAN B L, DEFOORT M, et al. Fixed-time consensus tracking for multi-agent systems with high-order integrator dynamics[J]. IEEE Transactions on Automatic Control, 2018, 63(2): 563-570. doi: 10.1109/TAC.2017.2729502
|
| [24] |
DONG Y, ZOU A M, SUN Z W. Predefined-time predefined-bounded attitude tracking control for rigid spacecraft[J]. IEEE Transactions on Aerospace and Electronic Systems, 2022, 58(1): 464-472. doi: 10.1109/TAES.2021.3103258
|
| [25] |
邹尧, 孟子阳. 垂直起降飞行器的自适应集群编队飞行控制[J]. 中国科学:技术科学, 2020, 50(4): 369-379. doi: 10.1360/SST-2019-0289
ZOU Y, MENG Z Y. Adaptive formation control of multiple vertical takeoff and landing UAVs[J]. Scientia Sinica Technologica, 2020, 50(4): 369-379(in Chinese). doi: 10.1360/SST-2019-0289
|
Figures(9) / Tables(1)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: