| Citation: | DONG B X,QIN T,YANG X,et al. Human-machine collaborative control of forward shovel hydraulic mining excavators[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(6):1952-1959 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0517

|
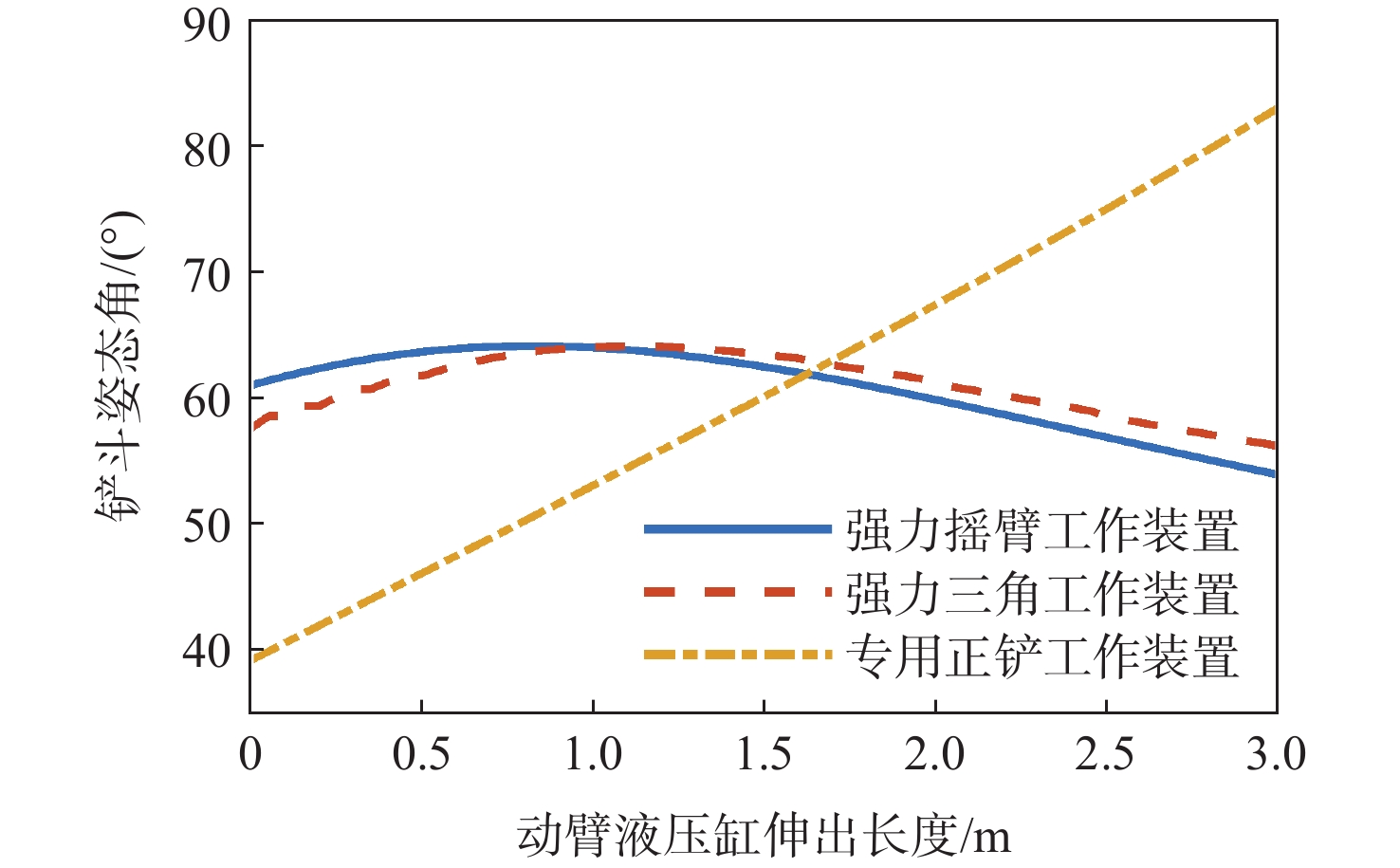
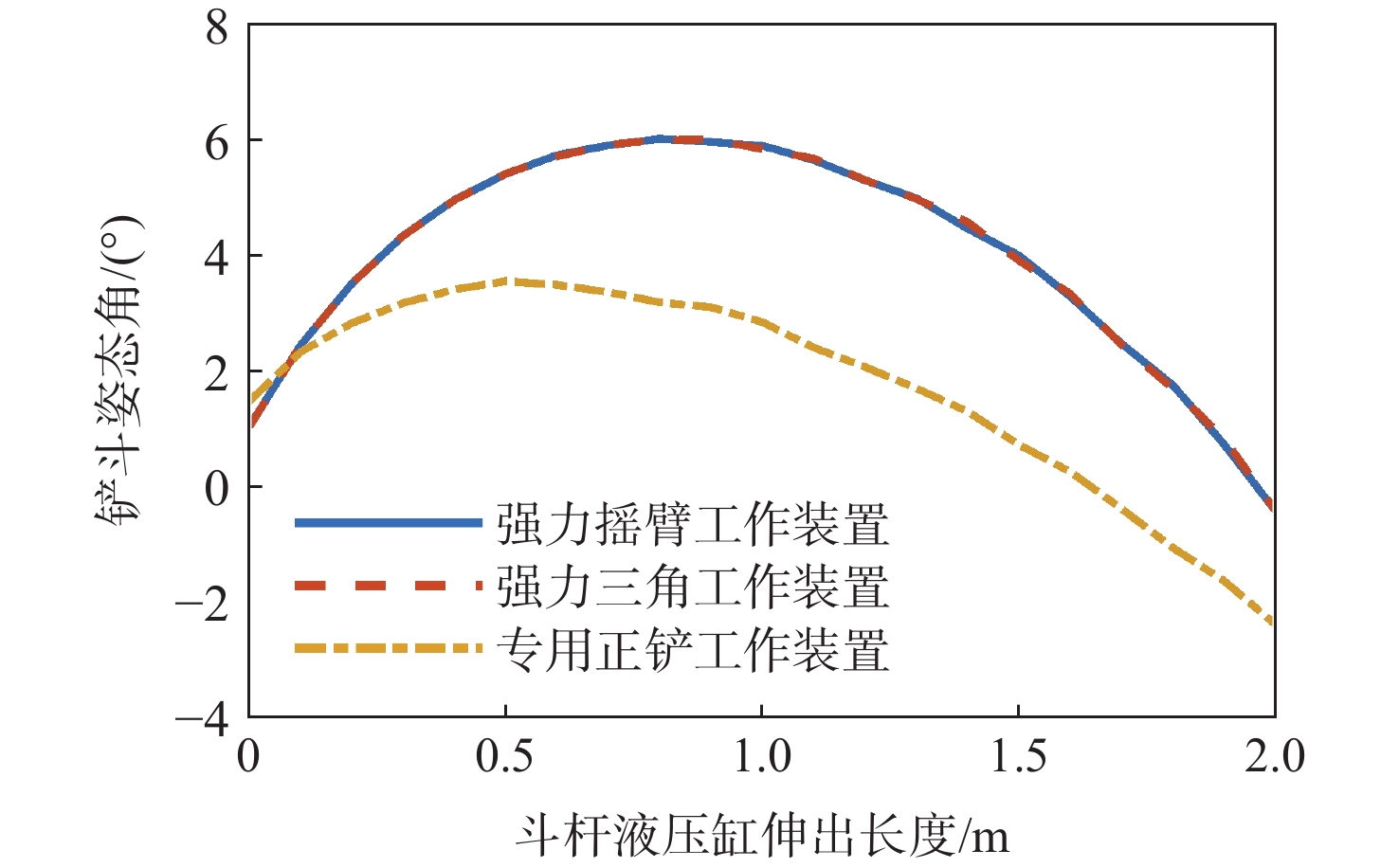
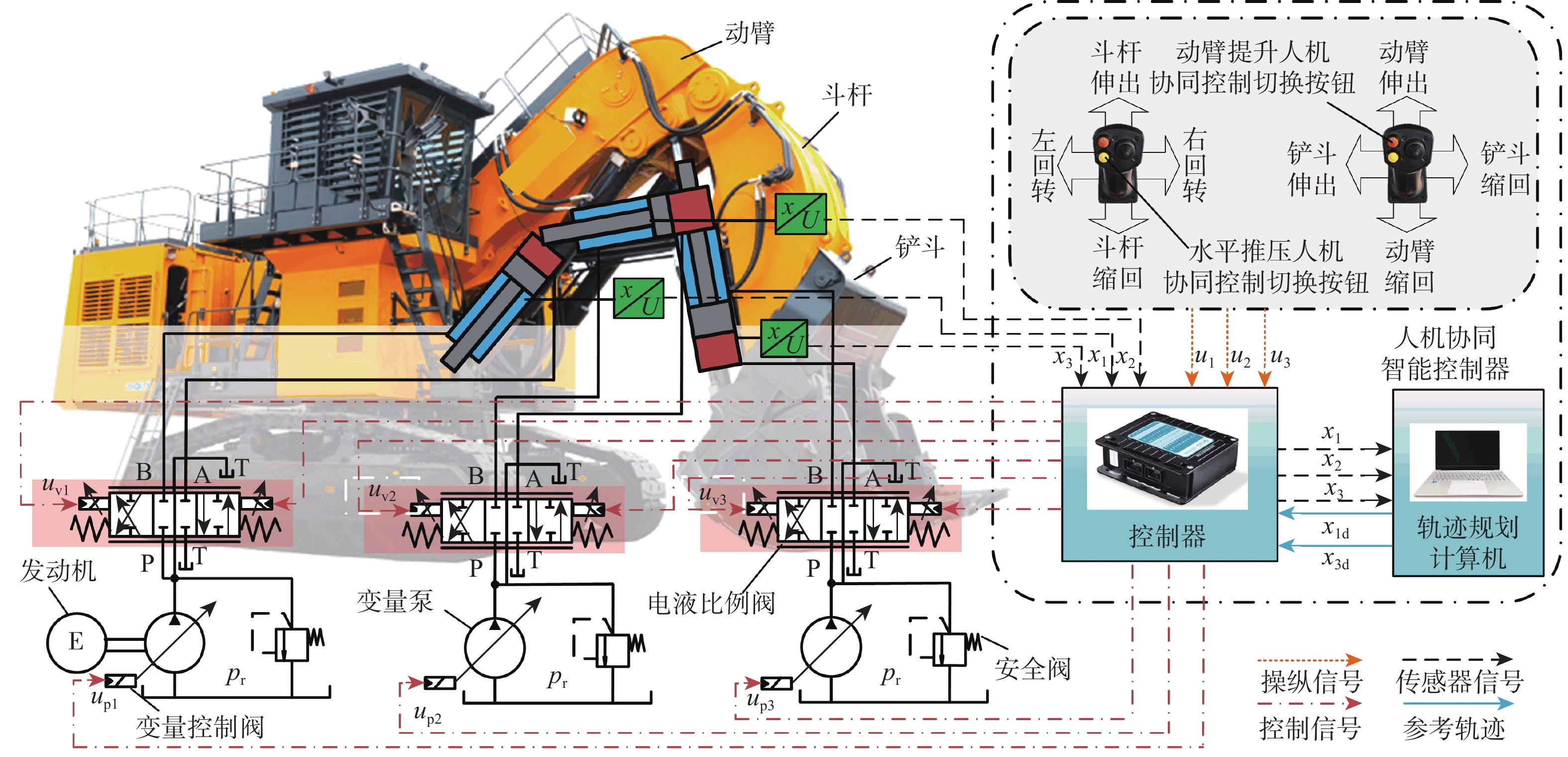
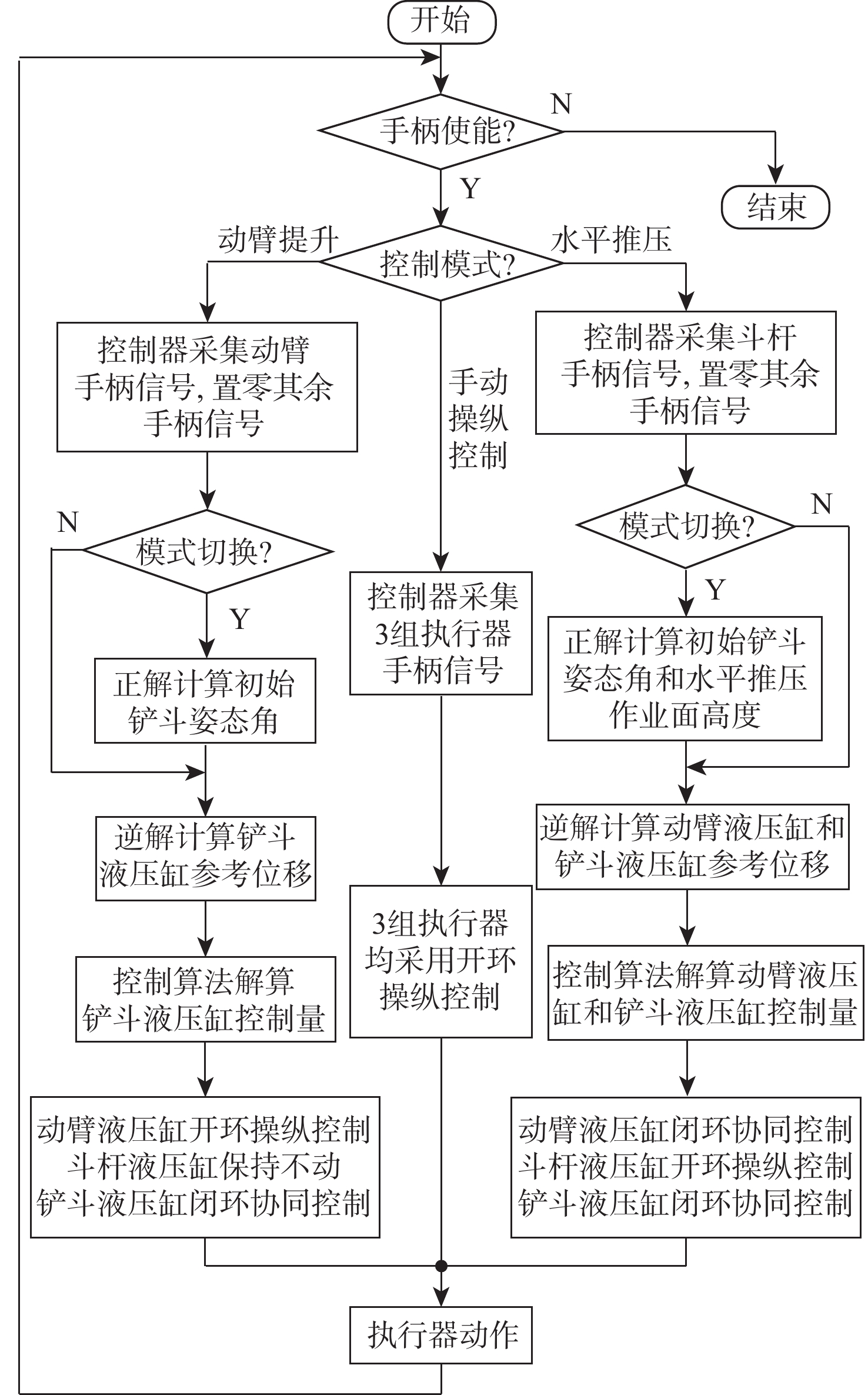
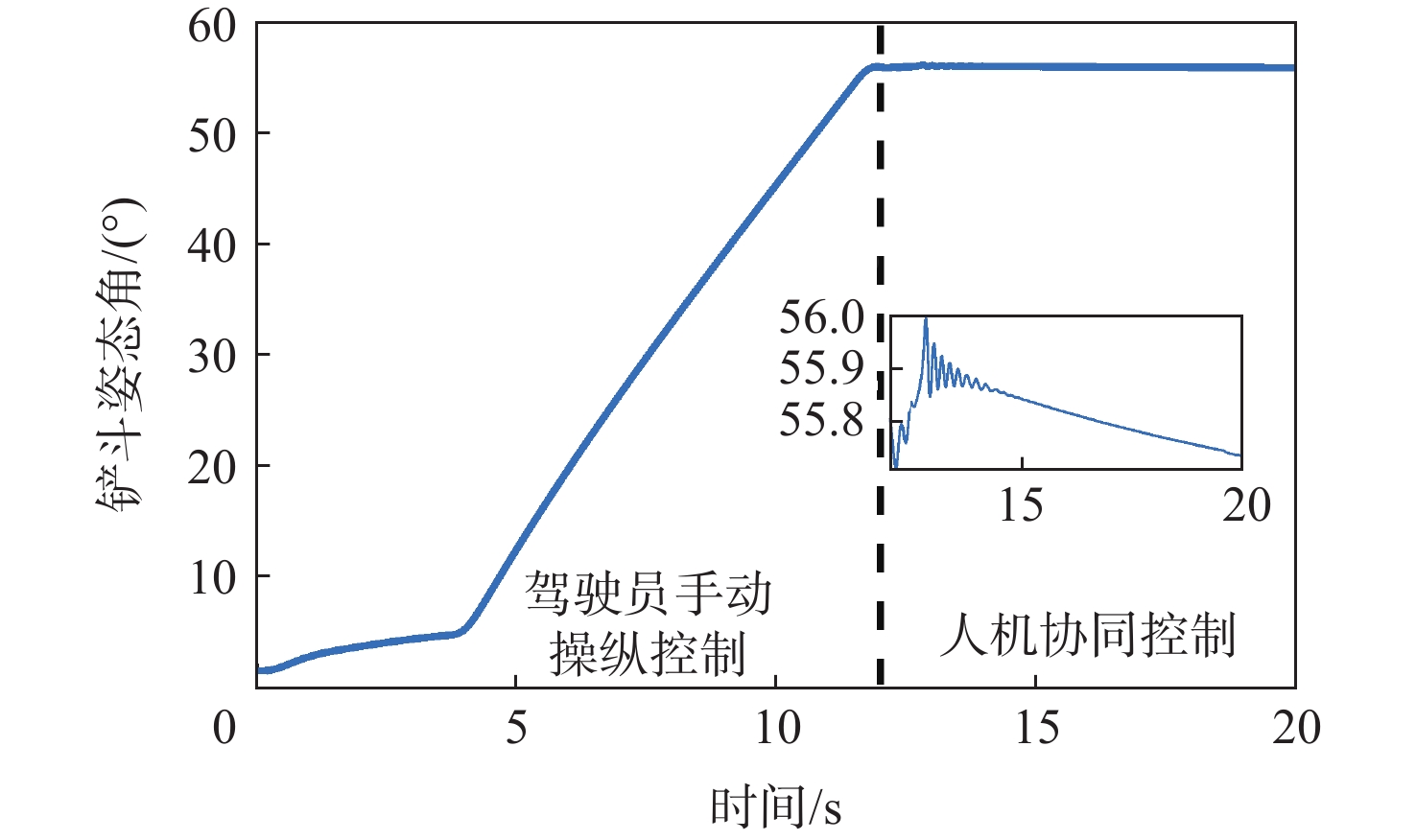
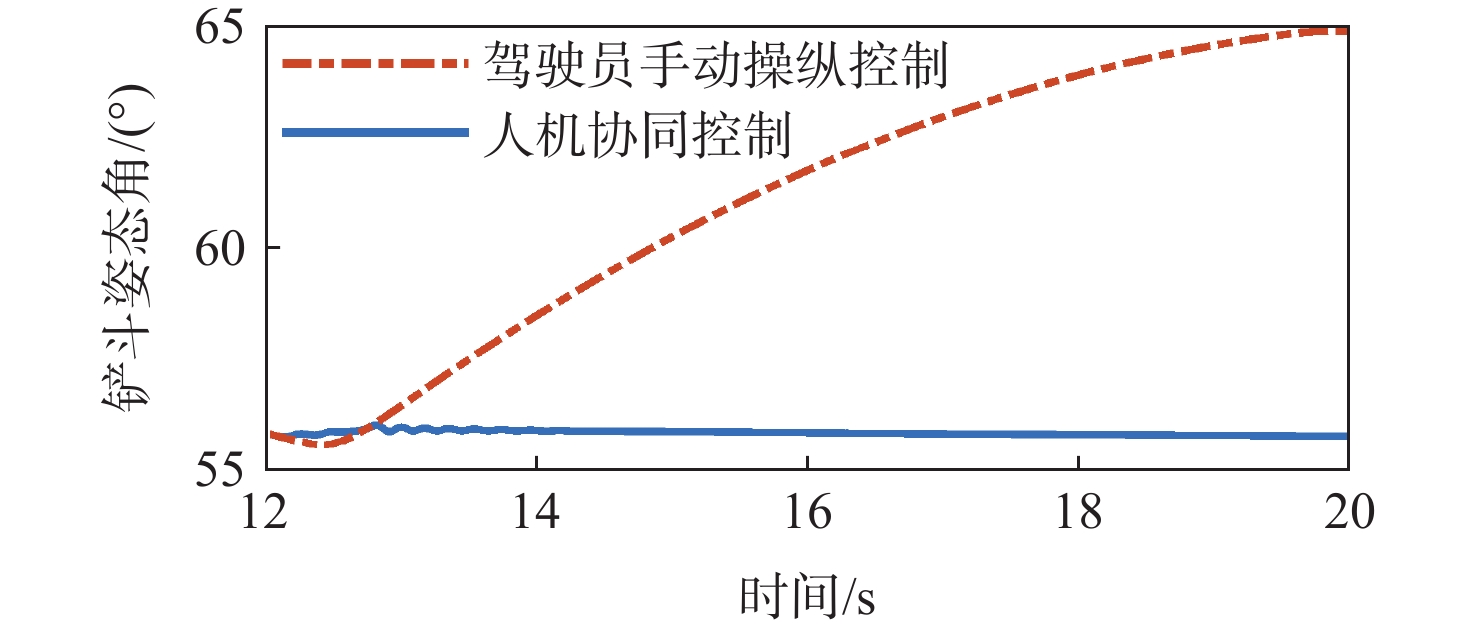
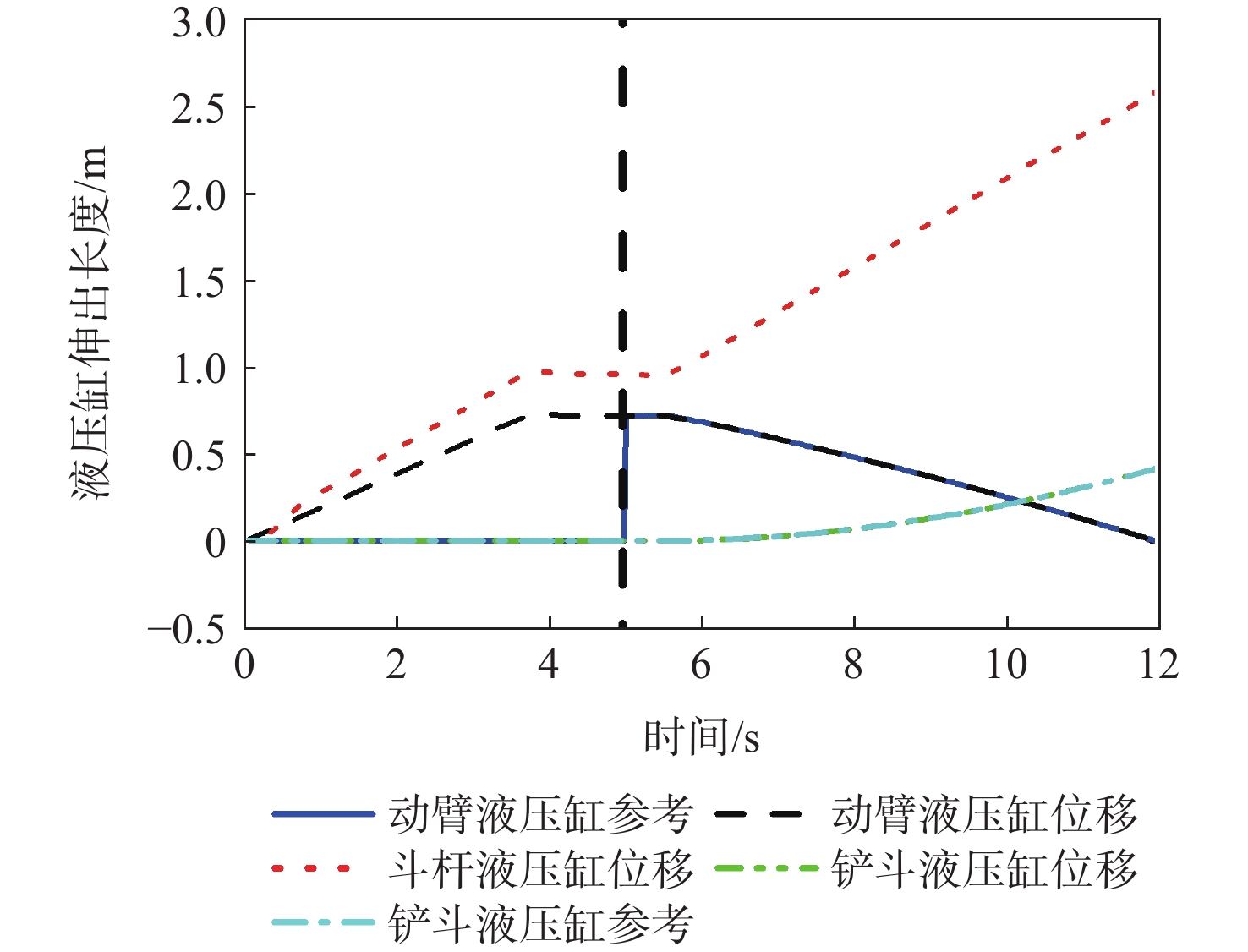
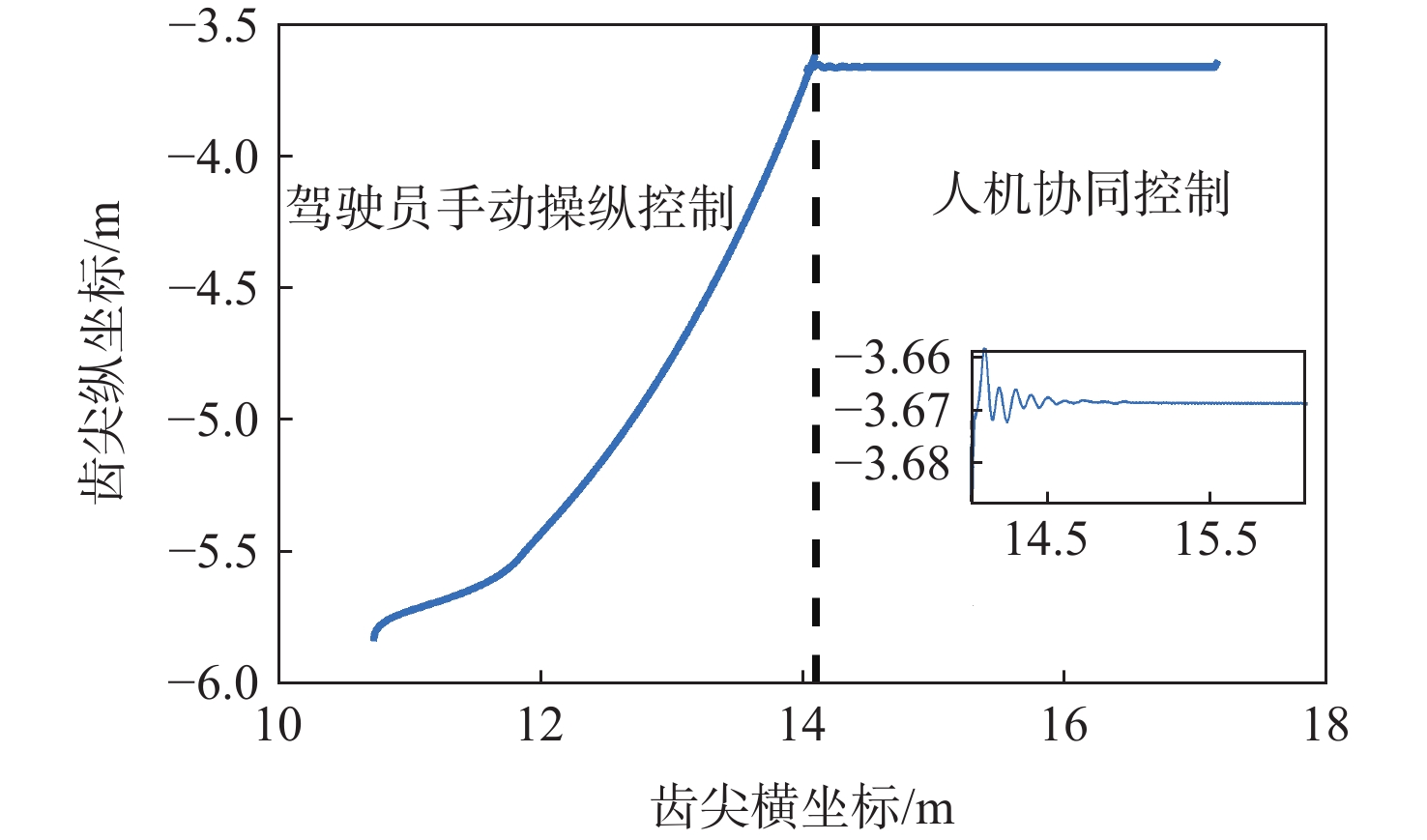
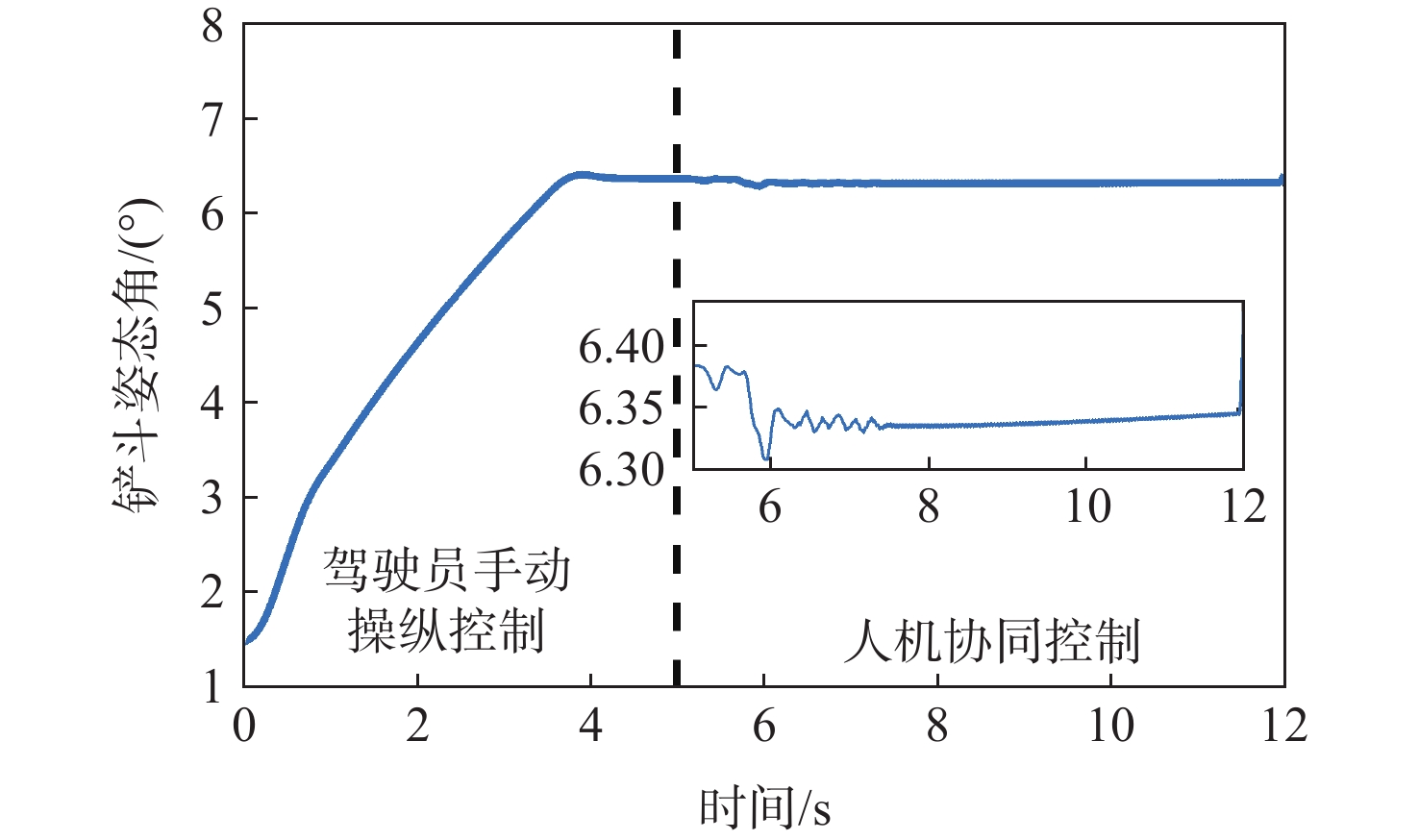
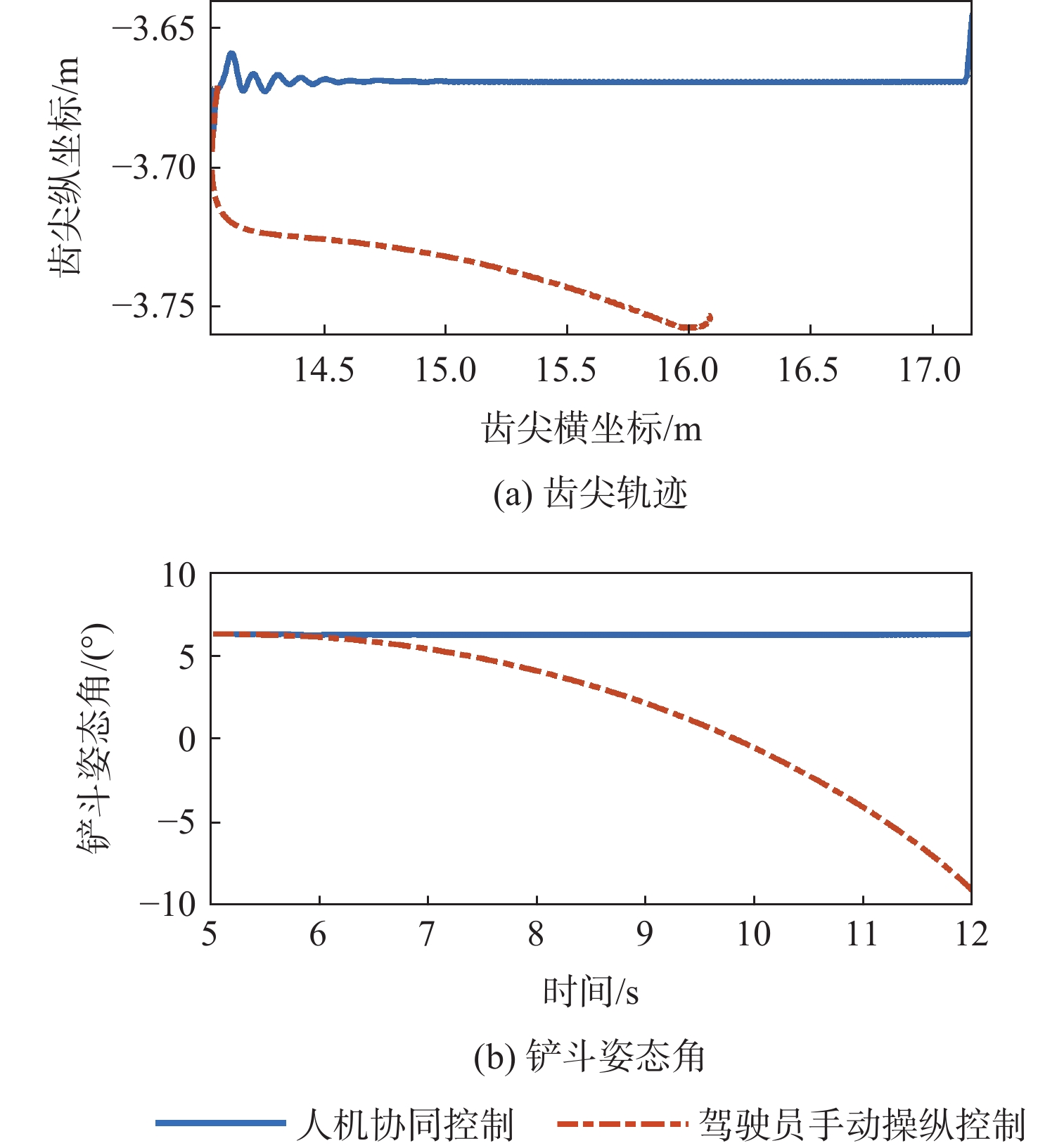
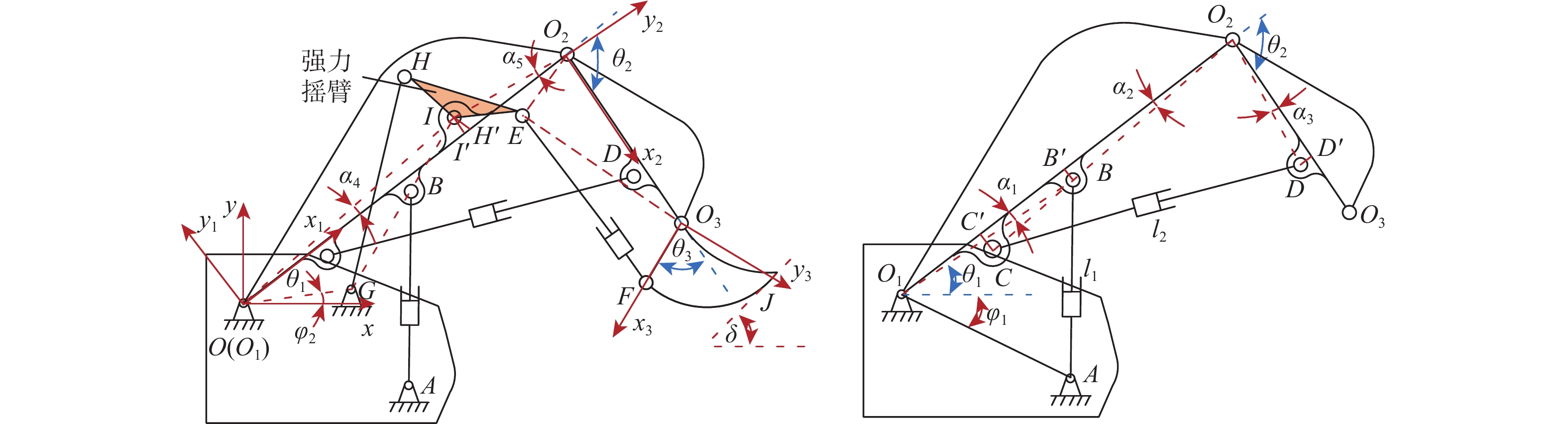
In view of the high operation complexity of forward shovel hydraulic mining excavators, a general human-machine collaborative control method was proposed. This paper compared the performance of three new working devices which could reduce the operation complexity of the forward shovel hydraulic excavators under the boom lifting and horizontal crowding operation modes. The results show that the innovative design of the working devices has the problems of complex mechanisms and low operation accuracy. The human-machine collaborative control method based on inverse kinematics and switching control adopts the strategy that the driver manually controls the main actuator, and other auxiliary actuators cooperate independently according to the constraints of operation requirements. This not only ensures the operation accuracy but also reduces the operation difficulty of drivers. The research results show that the proposed human-machine collaborative control method can reduce the operation complexity and improve the operation accuracy and efficiency of the forward shovel excavators under the boom lifting and horizontal crowding operation modes. The method has the advantages of flexible mode switching and strong universality.

| [1] |
HALL A S, MCAREE P R. Robust bucket position tracking for a large hydraulic excavator[J]. Mechanism and Machine Theory, 2005, 40(1): 1-16. doi: 10.1016/j.mechmachtheory.2004.05.005
|
| [2] |
MITREV R, GRUYCHEV R, POBEGAILO P. CAD/CAE investigation of a large hydraulic mining excavator[J]. Machine Design, 2011, 3(1): 17-22.
|
| [3] |
VLADEANU A, VLADEANU G. The possibilities of the horizontal trajectory realization of the bucket teeth at tri-power excavators[C]//SISOM 2012 and Session of the Commission of Acoustics. Bucharest: SISOM press, 2012: 232-239.
|
| [4] |
朱丹丹, 曹宇. 强力三角结构液压正铲挖掘机的力学分析[J]. 煤矿机械, 2015, 36(11): 126-127.
ZHU D D, CAO Y. Kinematics analysis of triangle structure face-shovel[J]. Coal Mine Machinery, 2015, 36(11): 126-127 (in Chinese).
|
| [5] |
丁华锋, 曹宇, 杨真真, 等. 基于D-H法的多连杆正铲挖掘机运动学分析与包络图绘制[J]. 燕山大学学报, 2014, 38(3): 197-203. doi: 10.3969/j.issn.1007-791X.2014.03.002
DING H F, CAO Y, YANG Z Z, et al. Position kinematics analysis of multi-linkage face-shovel excavator and envelope plotting using D-H method[J]. Journal of Yanshan University, 2014, 38(3): 197-203(in Chinese). doi: 10.3969/j.issn.1007-791X.2014.03.002
|
| [6] |
LI Y H, MU X Y, FAN R J. Multi-objective optimization and simulation of novel working mechanism for face-shovel excavator[J]. International Journal of Intelligent Robotics and Applications, 2021, 5(1): 1-9. doi: 10.1007/s41315-020-00160-1
|
| [7] |
FAN R J, LI Y H. An adaptive fuzzy trajectory tracking control via improved cerebellar model articulation controller for electro-hydraulic shovel[J]. IEEE/ASME Transactions on Mechatronics, 2021, 26(6): 2870-2880. doi: 10.1109/TMECH.2021.3094284
|
| [8] |
QIN T, LI Y H, QUAN L, et al. An adaptive robust impedance control considering energy-saving of hydraulic excavator boom and stick systems[J]. IEEE/ASME Transactions on Mechatronics, 2022, 27(4): 1928-1936. doi: 10.1109/TMECH.2022.3173991
|
| [9] |
SHI J P, QUAN L, ZHANG X G, et al. Electro-hydraulic velocity and position control based on independent metering valve control in mobile construction equipment[J]. Automation in Construction, 2018, 94: 73-84. doi: 10.1016/j.autcon.2018.06.005
|
| [10] |
BAO R K, WANG Q F, WANG T. Energy-saving trajectory tracking control of a multi-pump multi-actuator hydraulic system[J]. IEEE Access, 2020, 8: 179156-179166. doi: 10.1109/ACCESS.2020.3027354
|
| [11] |
LI Y, WANG Q F. Adaptive neural finite-time trajectory tracking control of hydraulic excavators[J]. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2018, 232(7): 909-925.
|
| [12] |
李勇. 自动作业液压挖掘机的铲斗轨迹控制和回转力矩控制研究[D]. 杭州: 浙江大学, 2019: 79-85.
LI Y. Study on bucket traiectorv and swing torque control for the autonomous hydraulic excavator[D]. Hangzhou: Zhejiang University, 2019: 79-85(in Chinese).
|
| [13] |
KIM S, PARK J, KANG S, et al. A robust control approach for hydraulic excavators using μ-synthesis[J]. International Journal of Control, Automation and Systems, 2018, 16(4): 1615-1628. doi: 10.1007/s12555-017-0071-9
|
| [14] |
LEE C S, BAE J, HONG D. Contour control for leveling work with robotic excavator[J]. International Journal of Precision Engineering and Manufacturing, 2013, 14(12): 2055-2060. doi: 10.1007/s12541-013-0278-5
|
| [15] |
WANG D Y, ZHENG L J, YU H X, et al. Robotic excavator motion control using a nonlinear proportional-integral controller and cross-coupled pre-compensation[J]. Automation in Construction, 2016, 64: 1-6. doi: 10.1016/j.autcon.2015.12.024
|
| [16] |
ARAYA H, KAGOSHIMA M. Semi-automatic control system for hydraulic shovel[J]. Automation in Construction, 2001, 10(4): 477-486. doi: 10.1016/S0926-5805(00)00083-2
|
Figures(12) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: