| Citation: | CHENG H J,YANG J F,LIU Z H,et al. Rule-based integrated stability control of multi-axle special vehicle[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(6):1794-1805 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0569

|
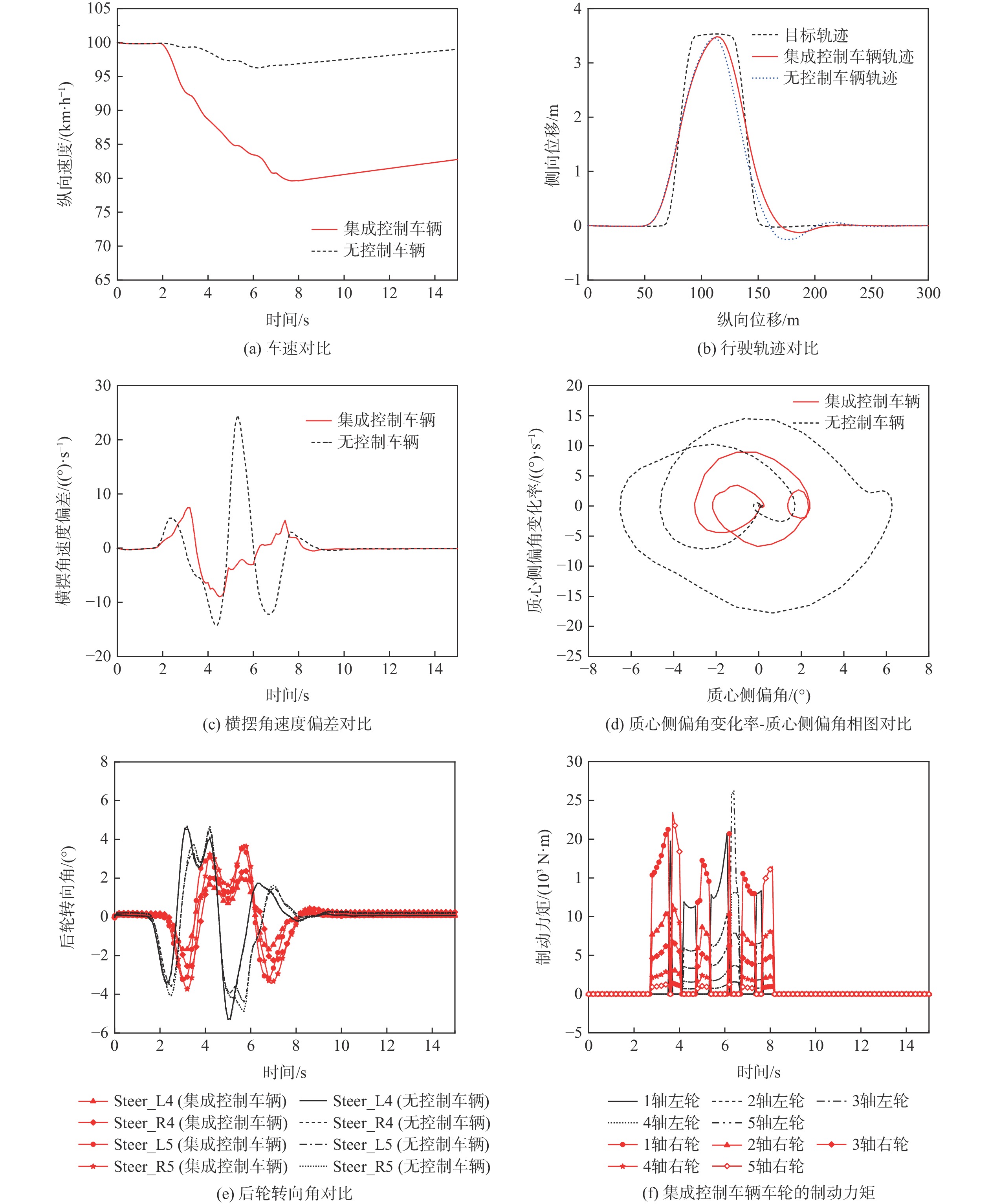
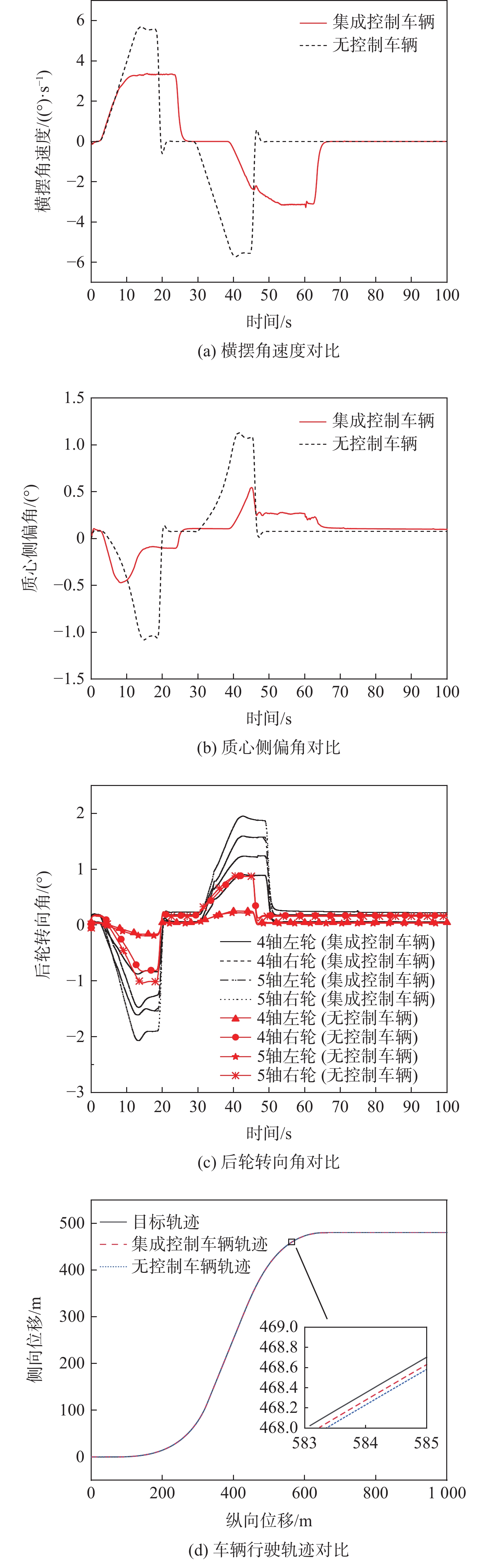
In order to improve the active safety and handling stability of multi-axle special vehicles, taking a heavy-duty 5-axle special vehicle as the research object, based on the adaptive coordinated control strategy, an integrated active rear wheel steering (ARS) and differential Hierarchical stability integrated control strategy for differential braking torque distribution (DBTD). The decision-making layer decides the coordinated control instructions of the ARS and DBTD sub-control systems based on the rules. The distribution layer uses the feedforward and feedback control technique to achieve the distribution of the active steering wheel angle, and it uses the synovial film control and specified rules to realize the distribution of the wheel differential braking torque. The control effect of the control strategy is verified by the co-simulation of Trucksin and Simulink, and the motion states of the stability-controlled vehicle and the uncontrolled vehicle under the two extreme conditions of high-attachment high maneuvering steering and low-speed low-attachment steering are compared and analyzed. The findings demonstrate that, under high-speed and high-speed situations, the integrated control system-controlled vehicle’s amplitudes of the yaw rate and side-slip angle are lowered by 46% and 63%, respectively, in comparison to the uncontrolled vehicle. With the working conditions, the yaw rate and the center of mass sideslip amplitude of the vehicle are reduced by 47% and 58% respectively compared with the uncontrolled vehicle. The integrated control system can effectively improve the driving stability of the vehicle during high-speed steering and low-speed low-speed steering. Steering sensitivity and path following performance.

| [1] |
毕凤荣, 孙浩轩, 张立鹏, 等. 4WID车辆主动安全控制策略研究[J]. 天津大学学报(自然科学与工程技术版), 2022, 55(2): 158-165.
BI F R, SUN H X, ZHANG L P, et al. Research on the active safety control of the 4WID vehicle[J]. Journal of Tianjin University (Science and Technology), 2022, 55(2): 158-165(in Chinese).
|
| [2] |
张不扬. 基于主动转向与差动制动的四轴商用车稳定性集成控制算法开发[D]. 长春: 吉林大学, 2019.
ZHANG B Y. Development of integrated stability control algorithm for four-axle commercial vehicle based on active steering and differential braking[D]. Changchun: Jilin University, 2019(in Chinese).
|
| [3] |
AOUADJ N, HARTANI K, FATIHA M. New integrated vehicle dynamics control system based on the coordination of active front steering, direct yaw control, and electric differential for improvements in vehicle handling and stability[J]. SAE International Journal of Vehicle Dynamics, Stability, and NVH, 2020, 4(2): 119-133. doi: 10.4271/10-04-02-0009
|
| [4] |
邓召文, 孔昕昕, 高伟. 重型半挂汽车列车主动转向控制策略研究[J]. 现代制造工程, 2021(10): 17-24.
DENG Z W, KONG X X, GAO W. Research on active steering control strategy of articulated heavy vehicles[J]. Modern Manufacturing Engineering, 2021(10): 17-24(in Chinese).
|
| [5] |
张为, 丁能根, 王健, 等. 汽车DYC滑模控制器设计及系统稳定性分析[J]. 北京航空航天大学学报, 2010, 36(11): 1353-1357.
ZHANG W, DING N G, WANG J, et al. Vehicular DYC via SMC and system stability analysis[J]. Journal of Beijing University of Aeronautics and Astronautics, 2010, 36(11): 1353-1357(in Chinese).
|
| [6] |
高坤明, 郭宗和, 于瑶瑶, 等. 重型车辆主动悬架的滑模控制器设计及优化[J]. 山东理工大学学报(自然科学版), 2020, 34(4): 30-36.
GAO K M, GUO Z H, YU Y Y, et al. Design and optimization of sliding mode controller for active suspension of heavy vehicle[J]. Journal of Shandong University of Technology (Natural Science Edition), 2020, 34(4): 30-36(in Chinese).
|
| [7] |
赵强, 解利臣. 基于主动横向稳定杆的汽车防侧倾控制策略及算法研究[J]. 重庆理工大学学报(自然科学), 2019, 33(12): 1-7.
ZHAO Q, XIE L C. Research on anti-roll control strategy and algorithm of automobile based on active anti-roll bar[J]. Journal of Chongqing University of Technology (Natural Science), 2019, 33(12): 1-7(in Chinese).
|
| [8] |
朱宏波. 车辆稳定性控制系统控制策略研究及验证[D]. 长春: 吉林大学, 2019.
ZHU H B. Research and validation on control strategy of vehicle electronic stability control system[D]. Changchun: Jilin University, 2019(in Chinese).
|
| [9] |
WANG G D, LIU Y, LI S S, et al. New integrated vehicle stability control of active front steering and electronic stability control considering tire force reserve capability[J]. IEEE Transactions on Vehicular Technology, 2021, 70(3): 2181-2195. doi: 10.1109/TVT.2021.3056560
|
| [10] |
李韶华, 张志达, 周军魏. 全轮转向非线性重型车辆稳定性集成控制研究[J]. 振动与冲击, 2019, 38(9): 148-156.
LI S H, ZHANG Z D, ZHOU J W. Nonlinear integrated control for maneuvering stability of a heavy-duty vehicle with all-wheel steering[J]. Journal of Vibration and Shock, 2019, 38(9): 148-156(in Chinese).
|
| [11] |
孙船斌, 方琳, 童宝宏. 受饱和约束的车辆转向非线性鲁棒模糊分布控制[J]. 振动与冲击, 2022, 41(4): 77-85.
SUN C B, FANG L, TONG B H. Nonlinear robust fuzzy distributed control of vehicle steering with saturation constraint[J]. Journal of Vibration and Shock, 2022, 41(4): 77-85(in Chinese).
|
| [12] |
付翔, 杨凤举, 黄斌, 等. 主动后轮转向四轮独立驱动车辆的协调控制[J]. 江苏大学学报(自然科学版), 2021, 42(5): 497-505.
FU X, YANG F J, HUANG B, et al. Coordinated control of active rear wheel steering and four wheel independent driving vehicle[J]. Journal of Jiangsu University (Natural Science Edition), 2021, 42(5): 497-505(in Chinese).
|
| [13] |
AHMADIAN N, KHOSRAVI A, SARHADI P. Integrated model reference adaptive control to coordinate active front steering and direct yaw moment control[J]. ISA Transactions, 2020, 106: 85-96. doi: 10.1016/j.isatra.2020.06.020
|
| [14] |
赵权, 李韶华, 刘欢, 等. 某特种车辆整车动力学性能分析与评价[J]. 车辆与动力技术, 2018(4): 28-32. doi: 10.3969/j.issn.1009-4687.2018.04.006
ZHAO Q, LI S H, LIU H, et al. Dynamic performance analysis and evaluation of a special vehicle[J]. Vehicle & Power Technology, 2018(4): 28-32(in Chinese). doi: 10.3969/j.issn.1009-4687.2018.04.006
|
| [15] |
刘明春. 8×8轮毂电机驱动车辆操纵稳定性分析与控制研究[D]. 北京: 北京理工大学, 2015.
LIU M C. Study on handling stability analysis and control for 8 in-wheel motor drive vehicle[D]. Beijing: Beijing Institute of Technology, 2015(in Chinese).
|
| [16] |
KIM W, YI K, LEE J. An optimal traction, braking, and steering coordination strategy for stability and manoeuvrability of a six-wheel drive and six-wheel steer vehicle[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2012, 226(1): 3-22.
|

Figures(7) / Tables(3)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: