| Citation: | LUO Y L,LIAO Y R,LI Z M,et al. Strong tracking CKF adaptive interactive multiple model tracking algorithm based on hypersonic target[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(7):2272-2283 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0587

|
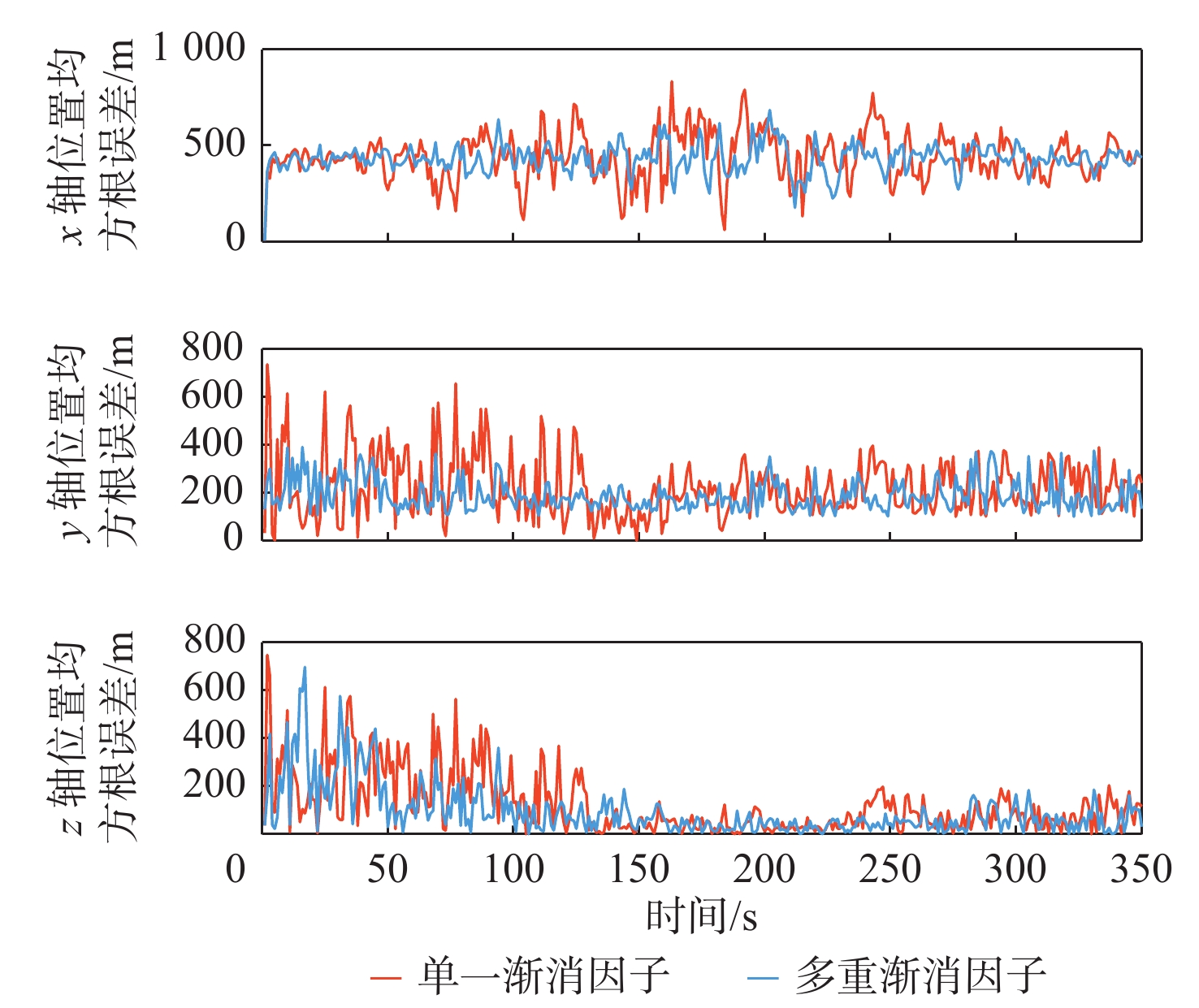
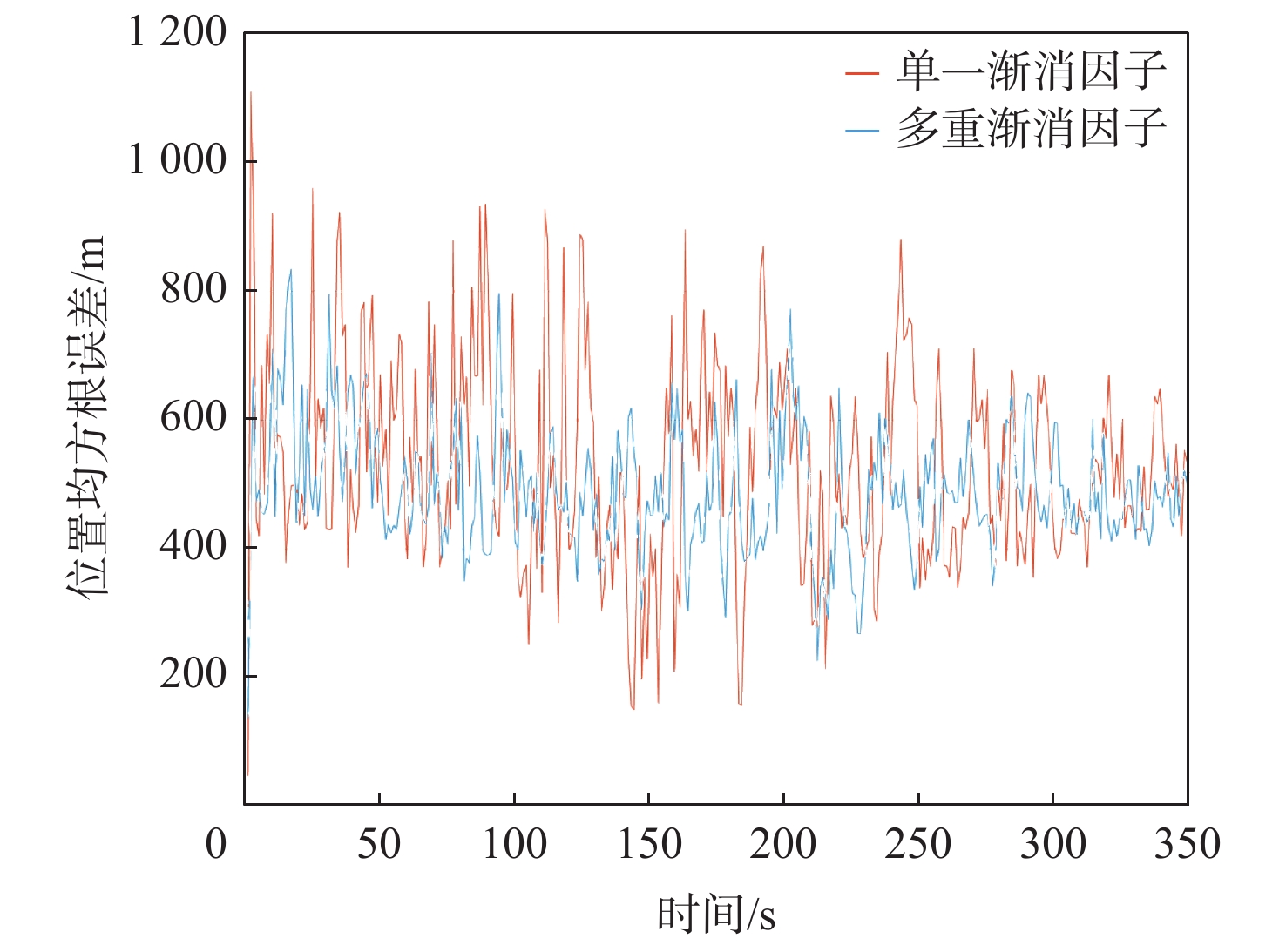
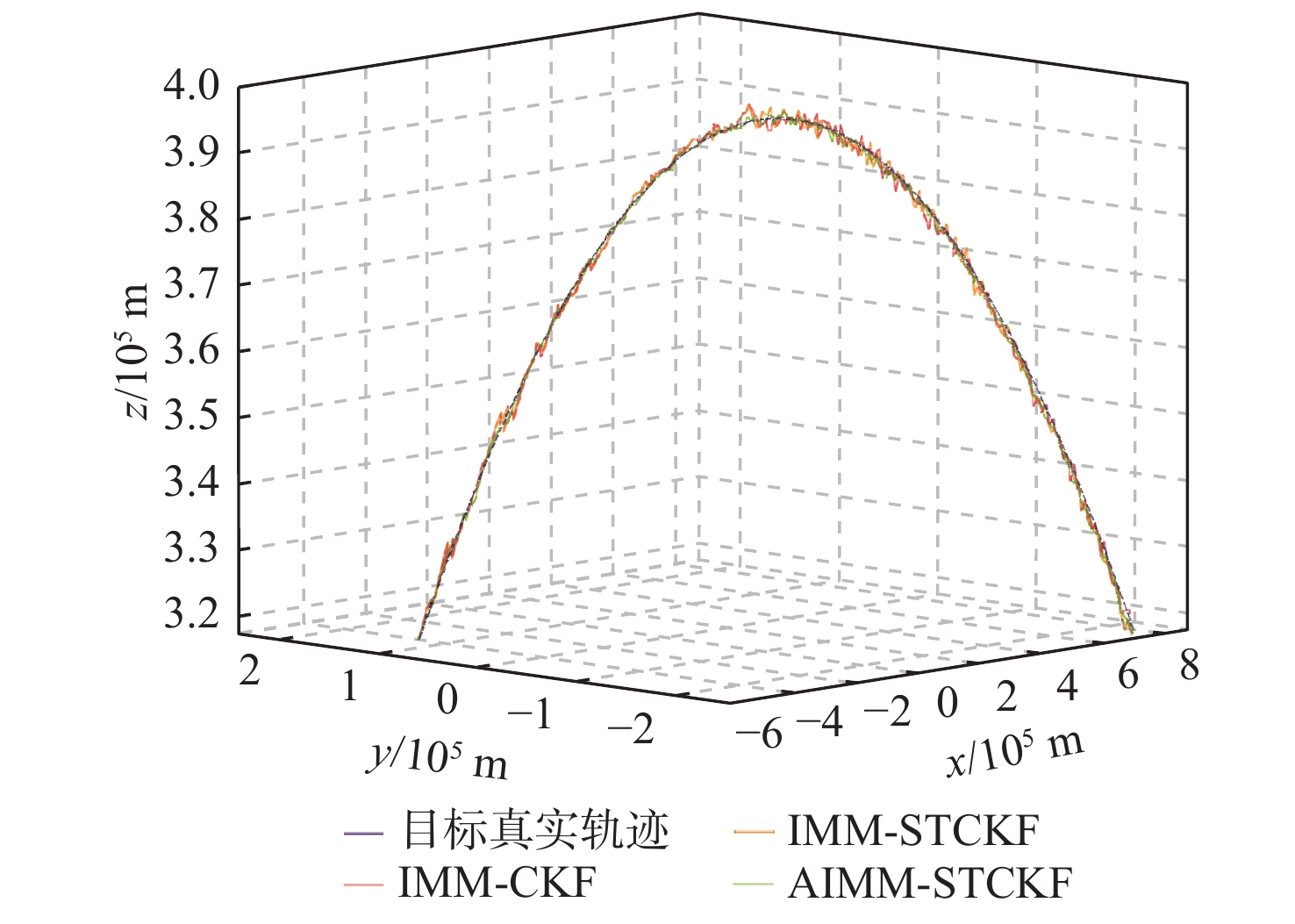
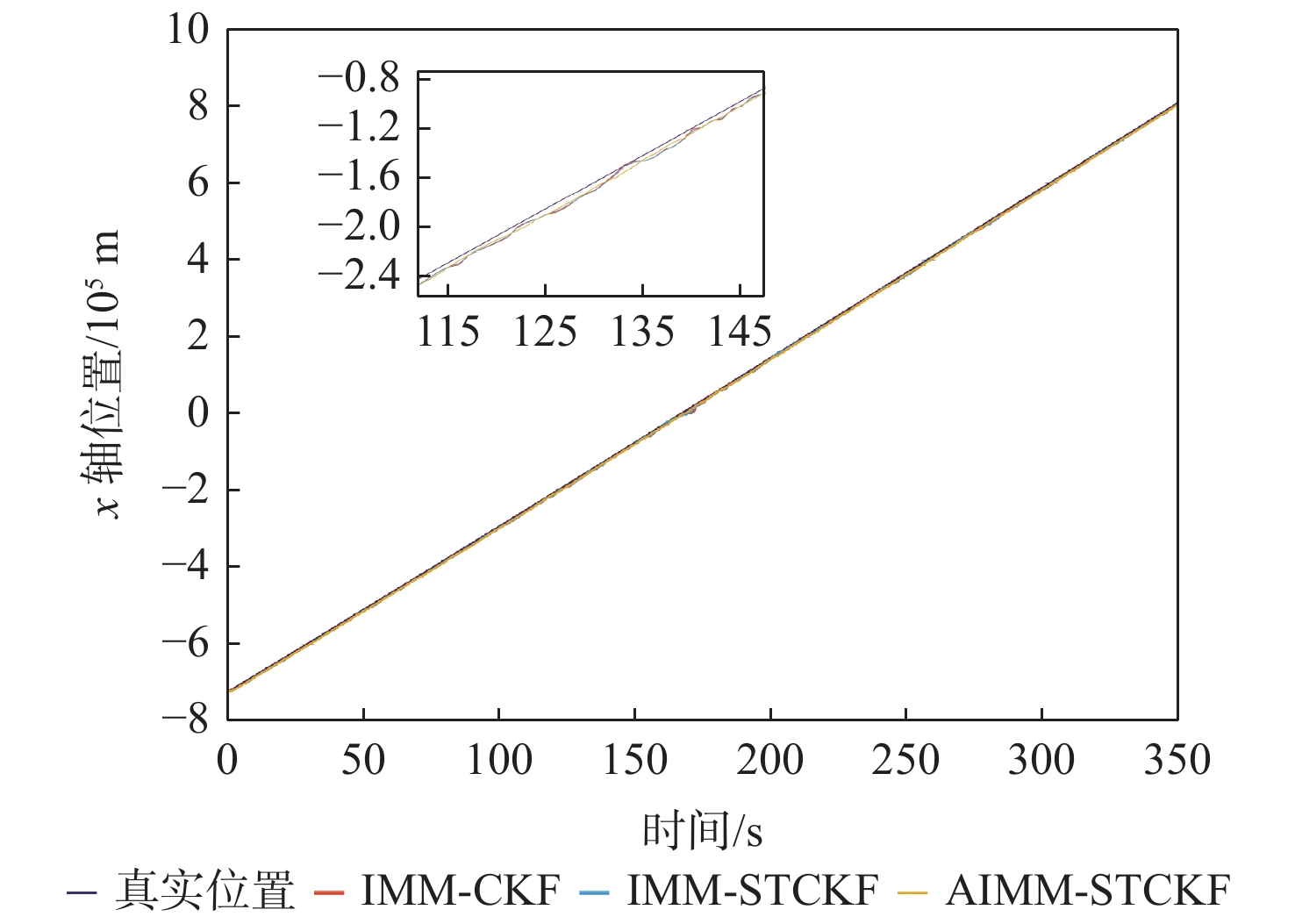
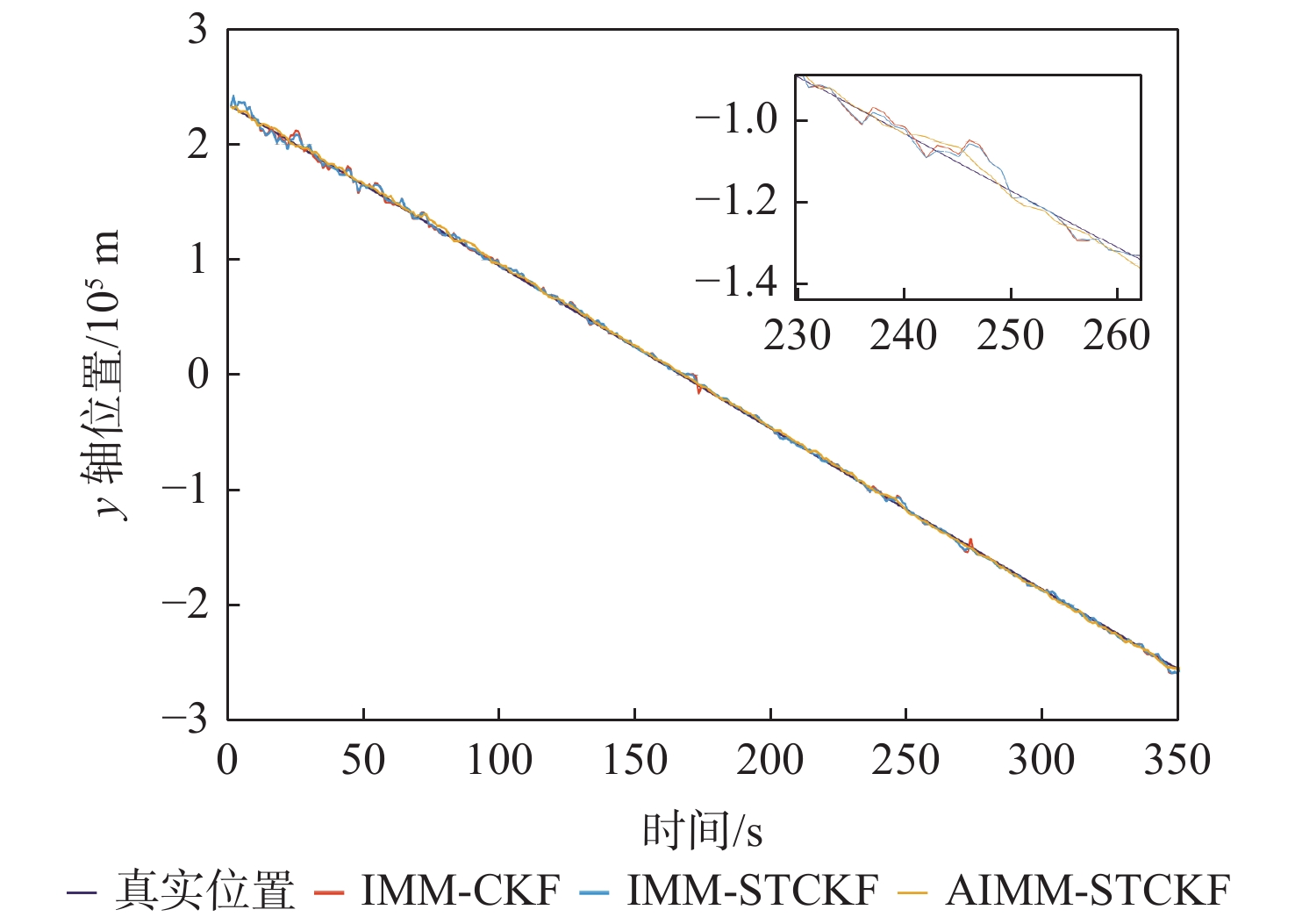
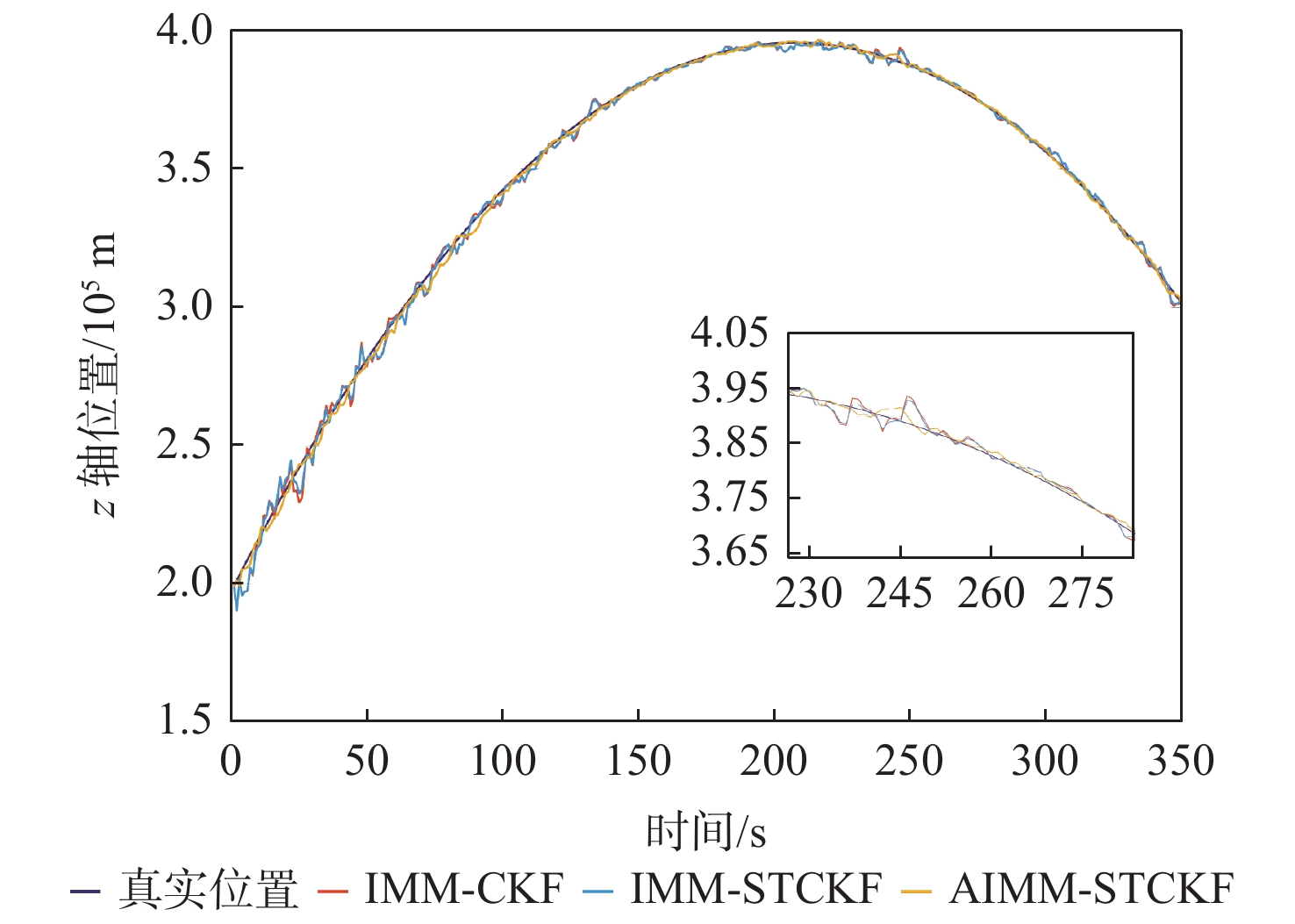
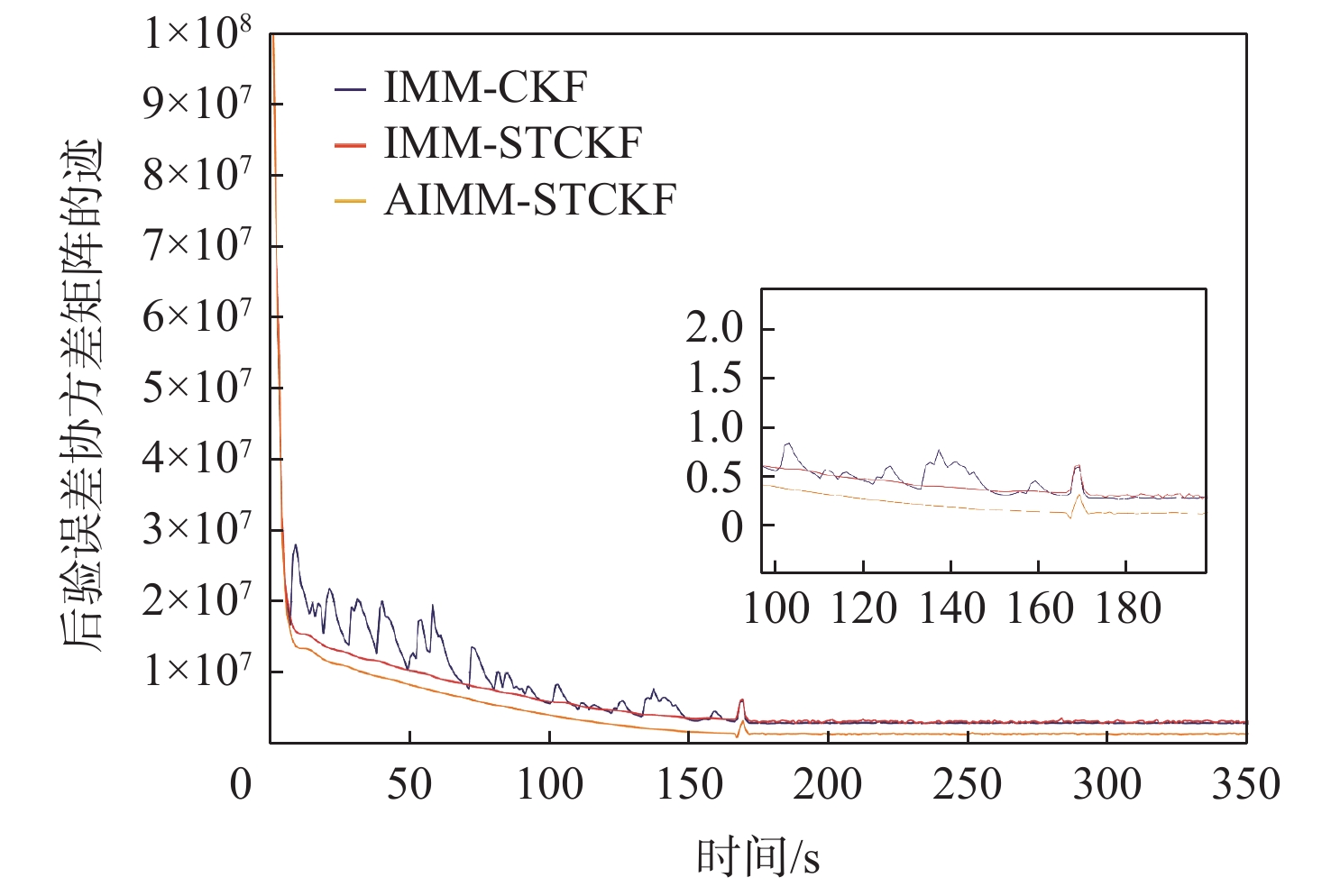
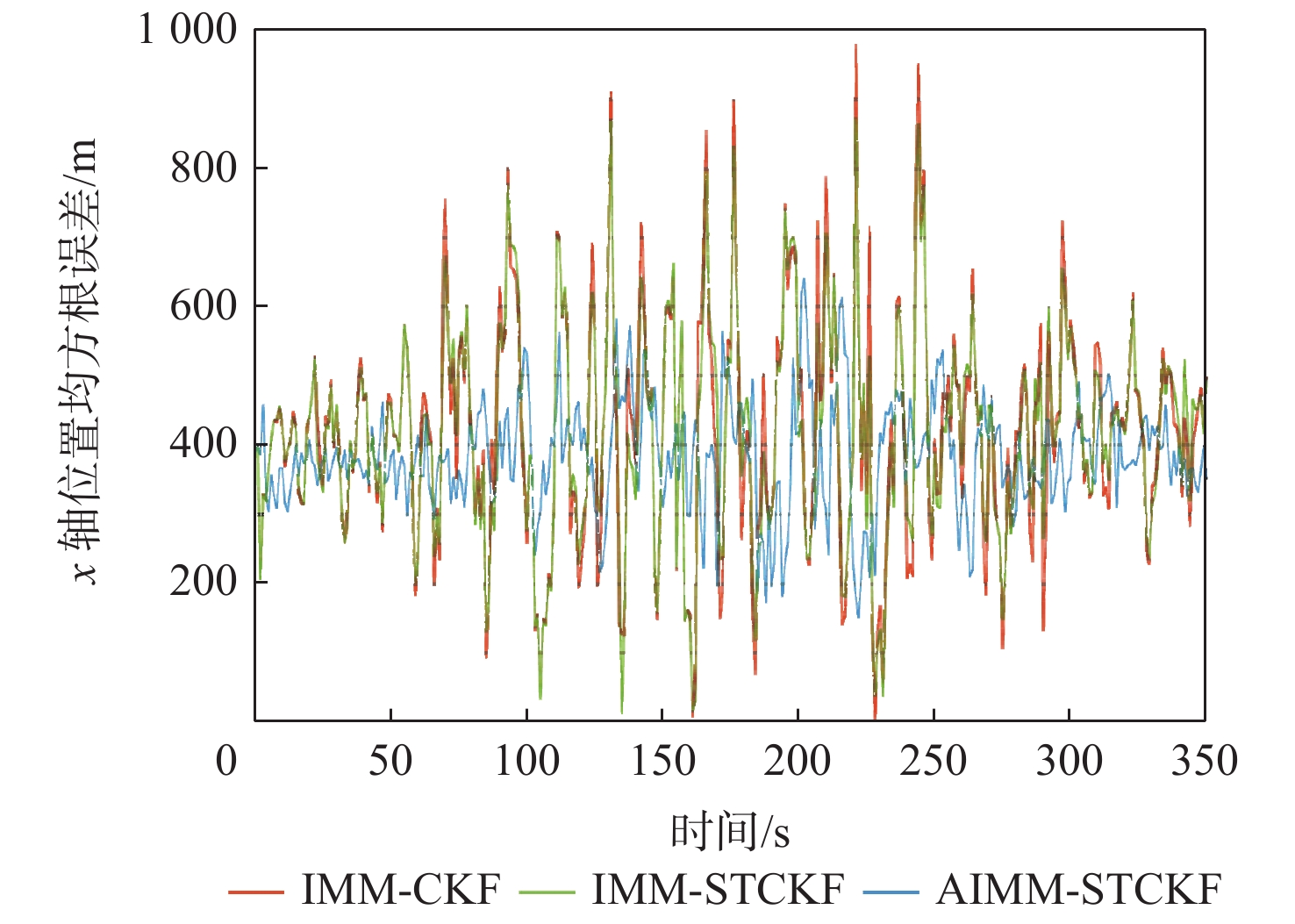
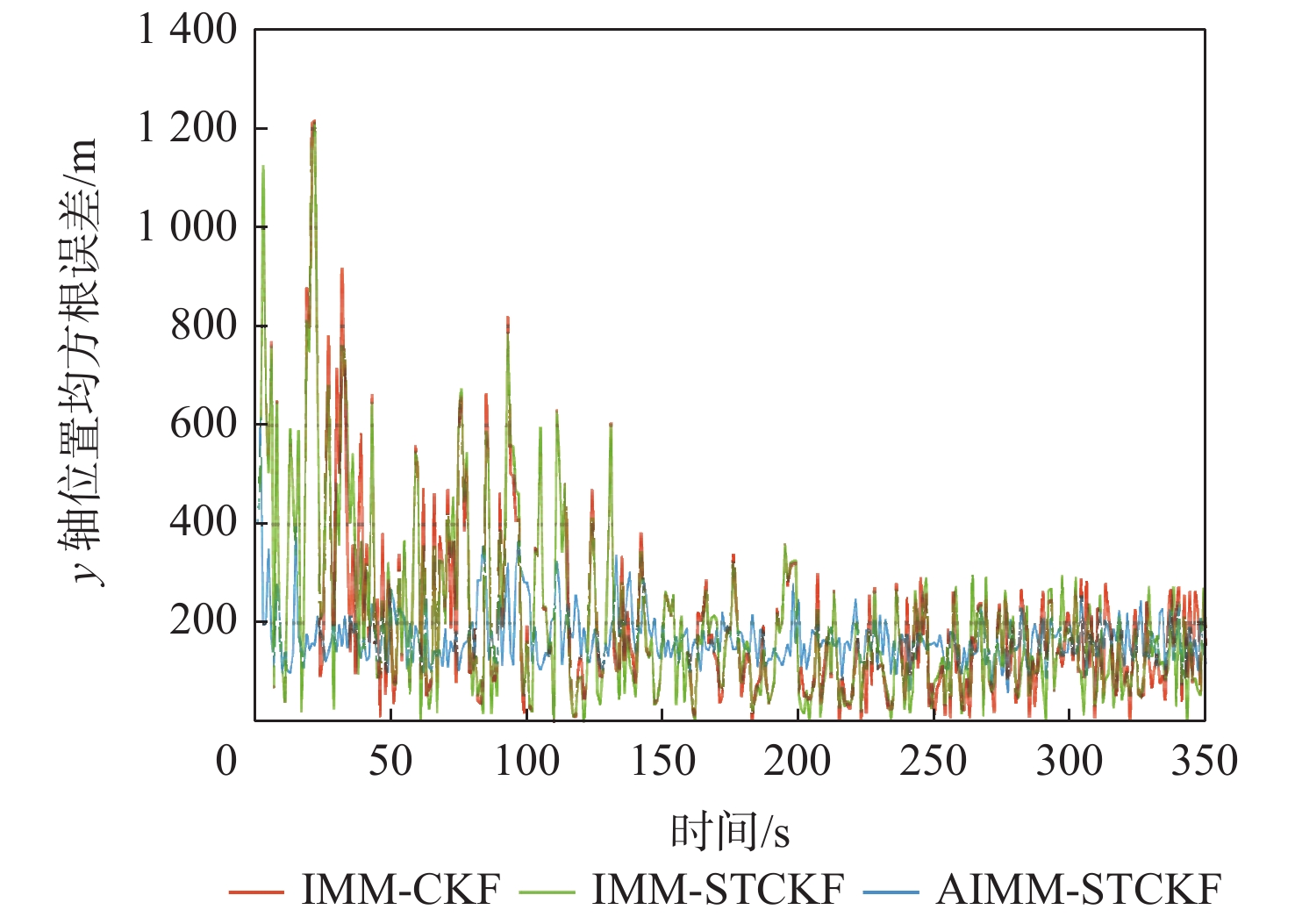
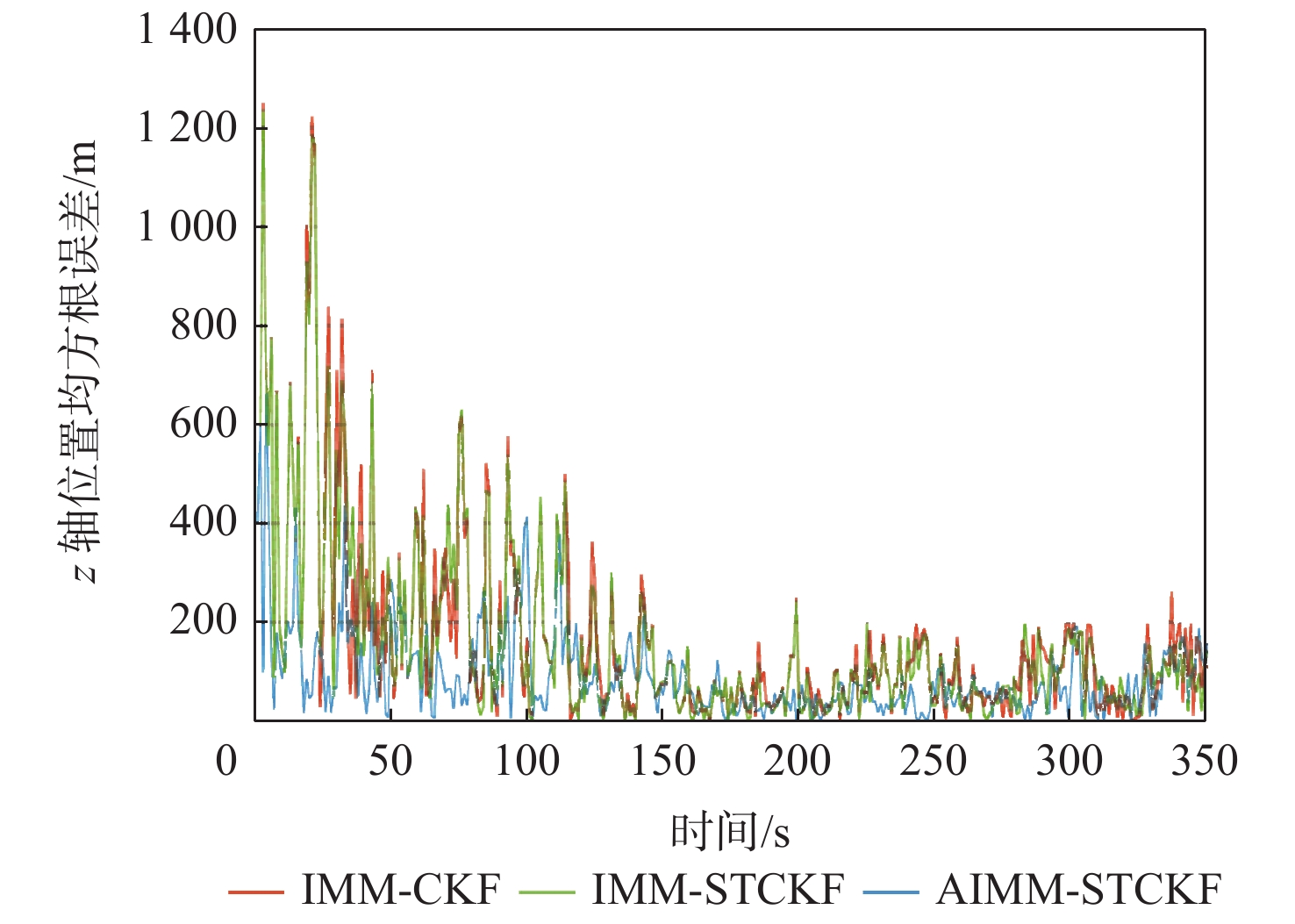
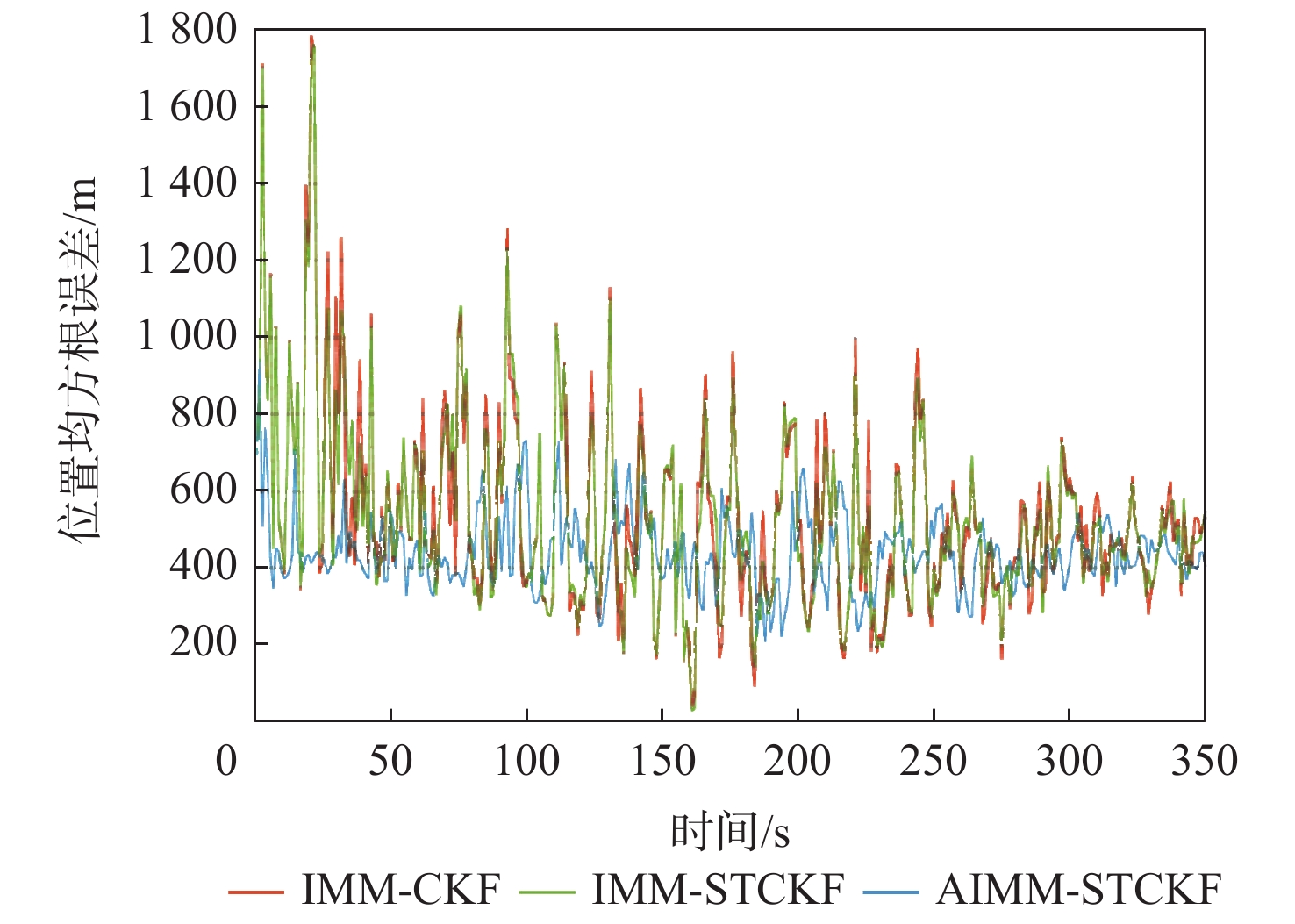
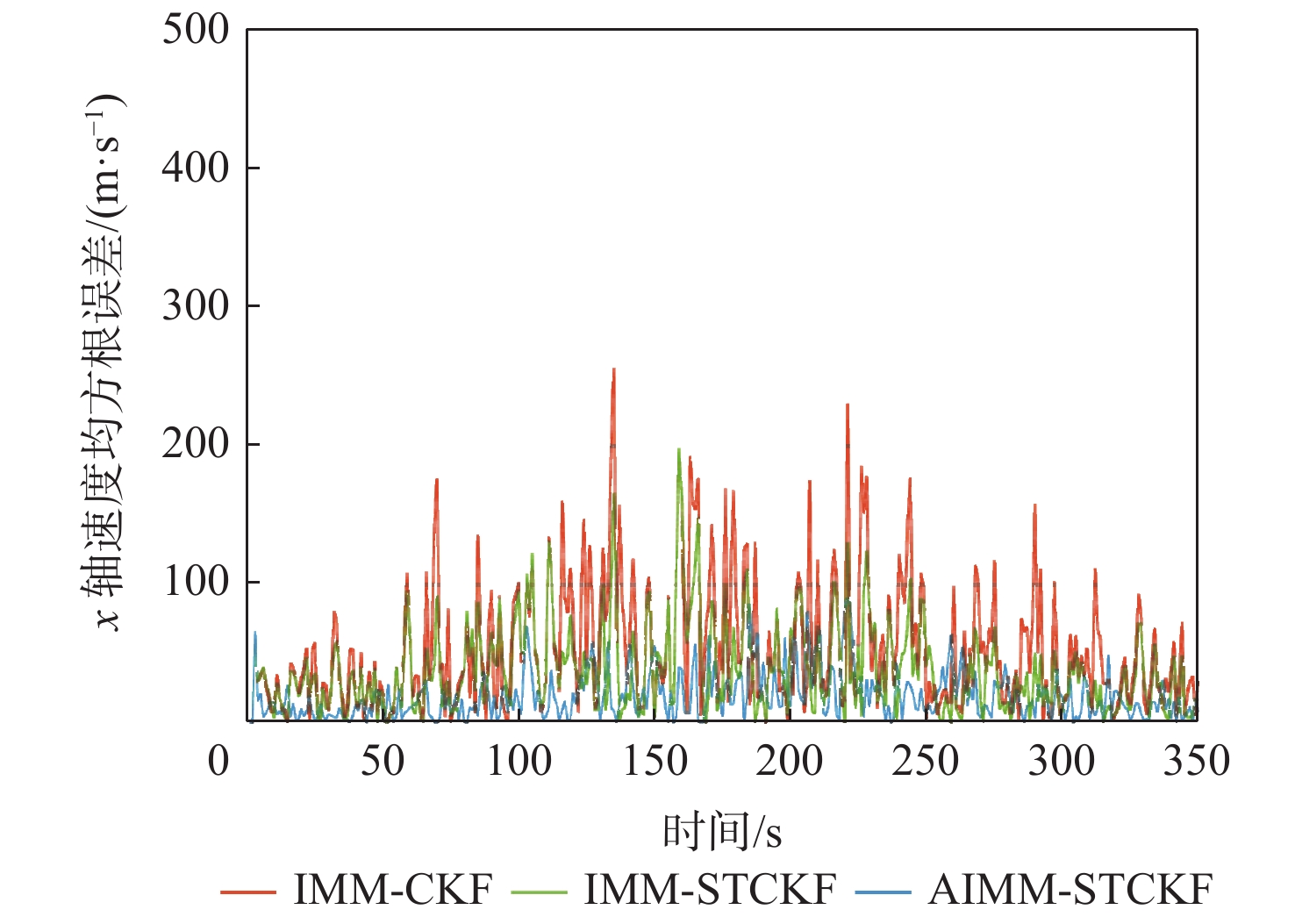
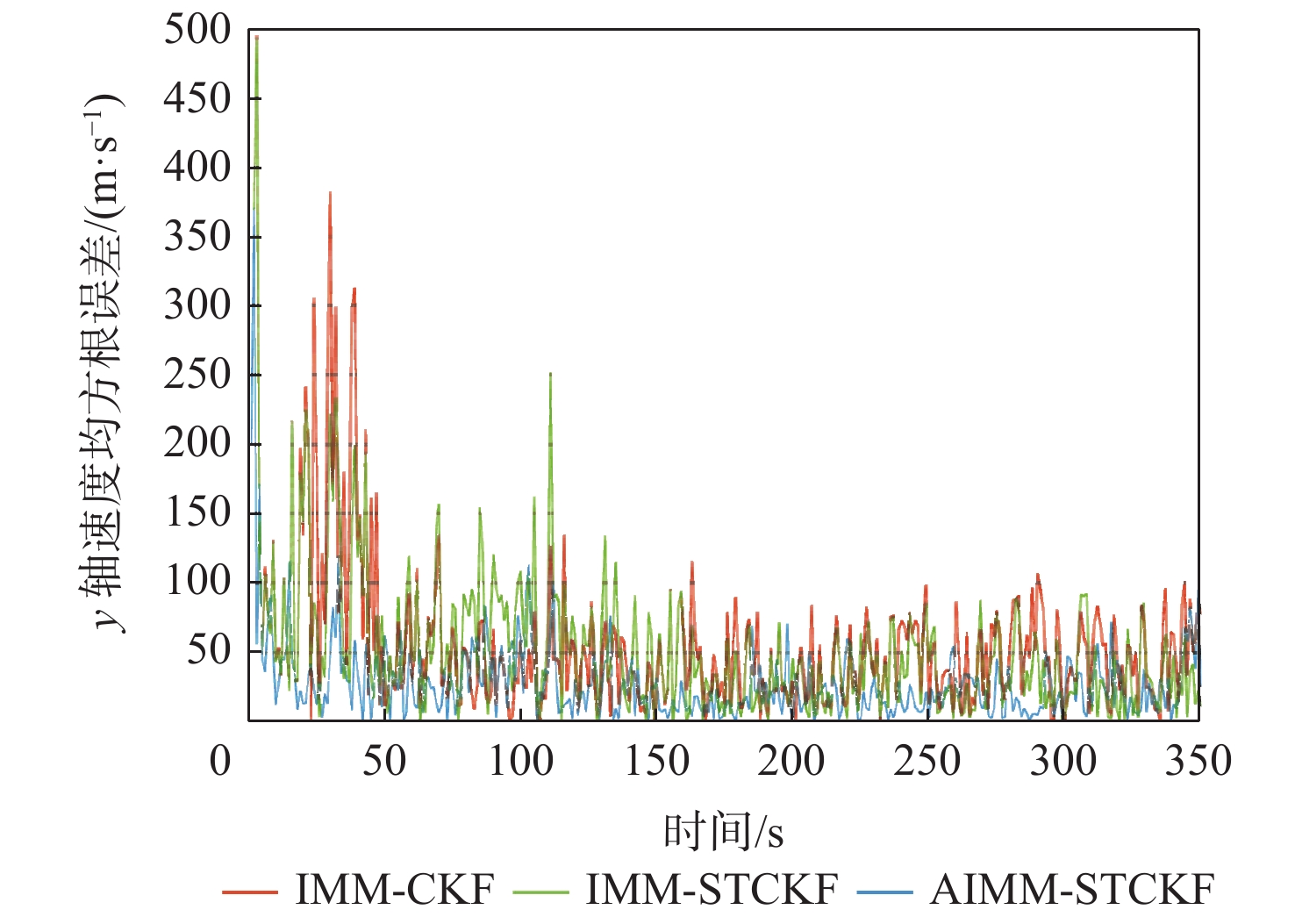
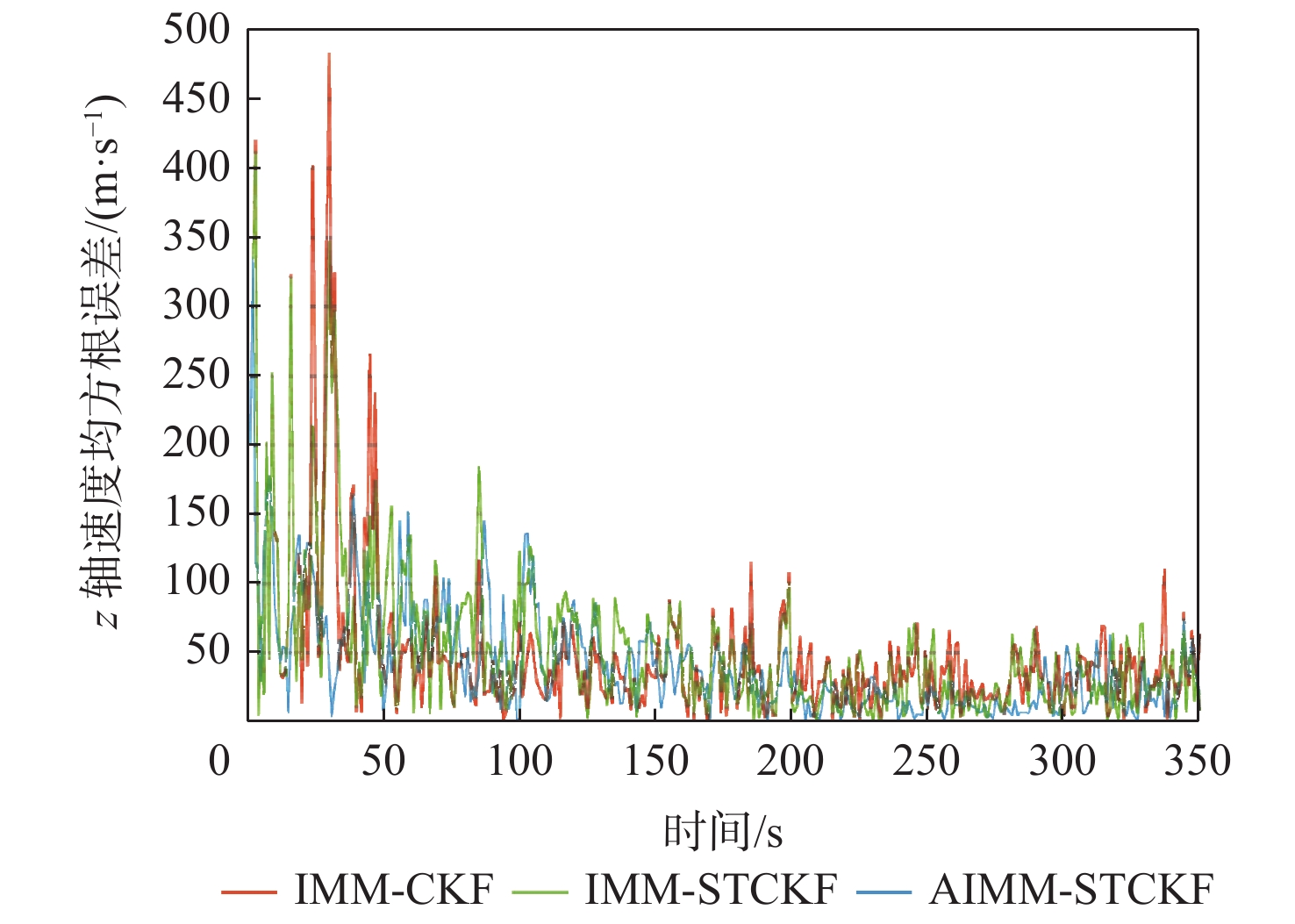
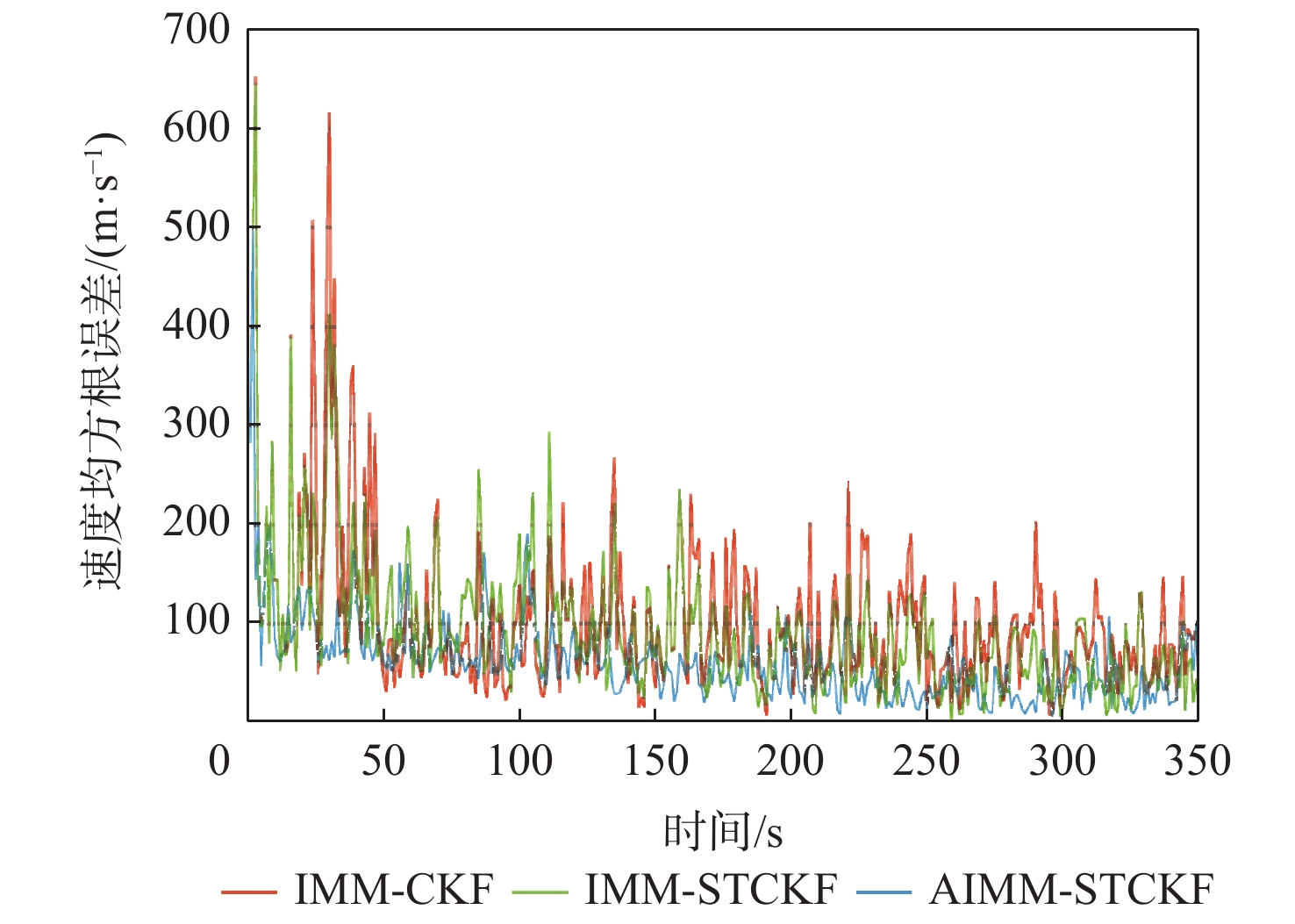
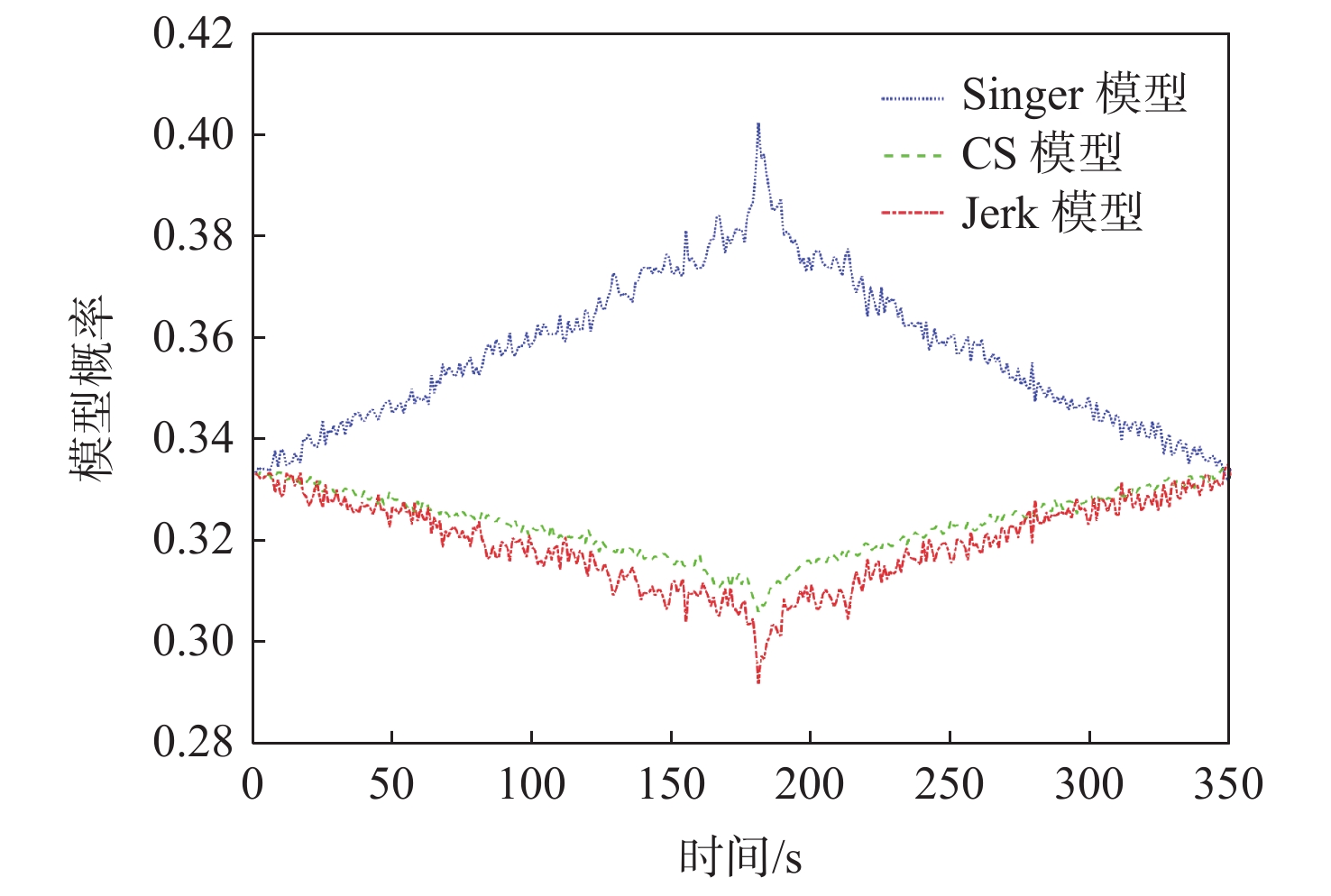
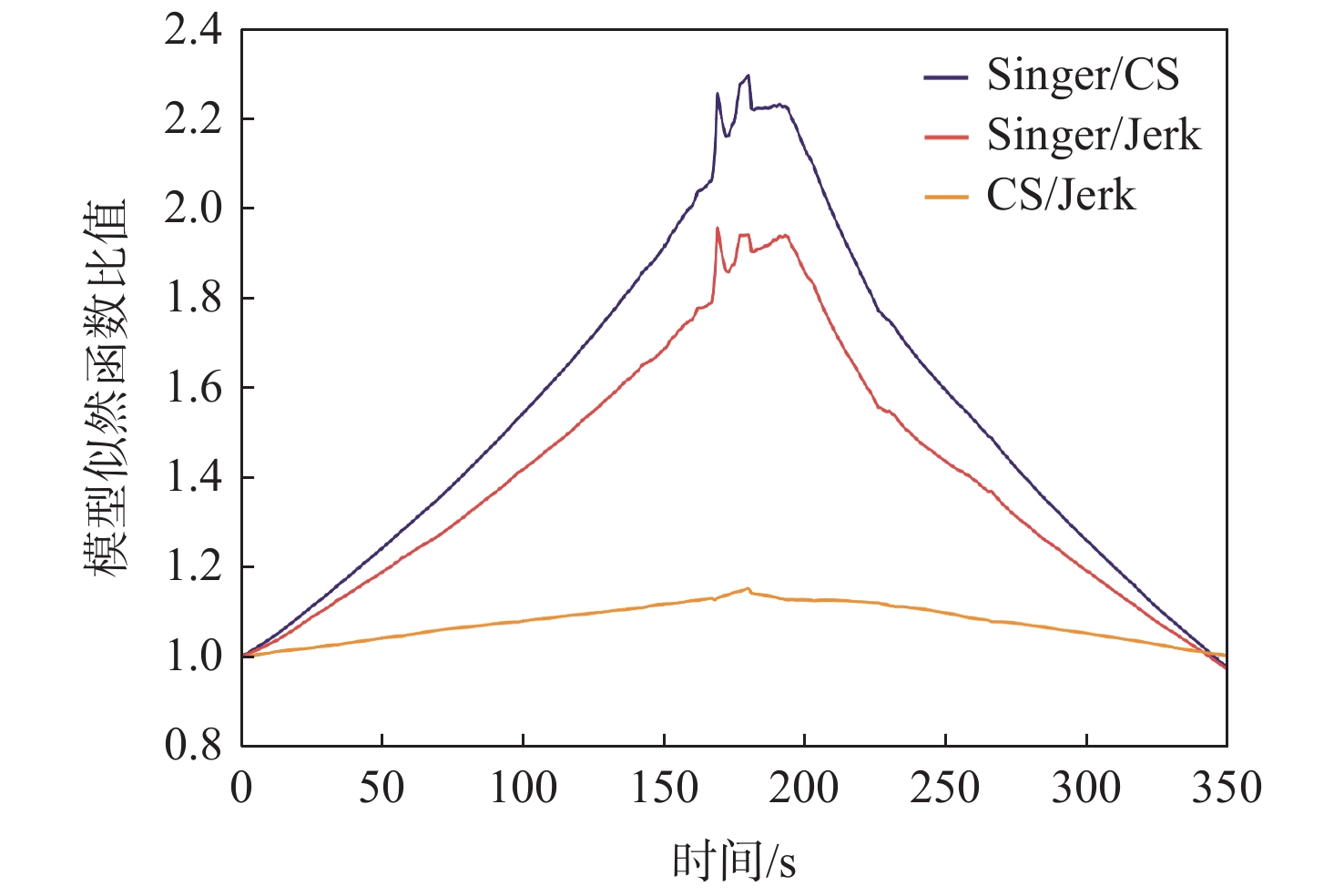
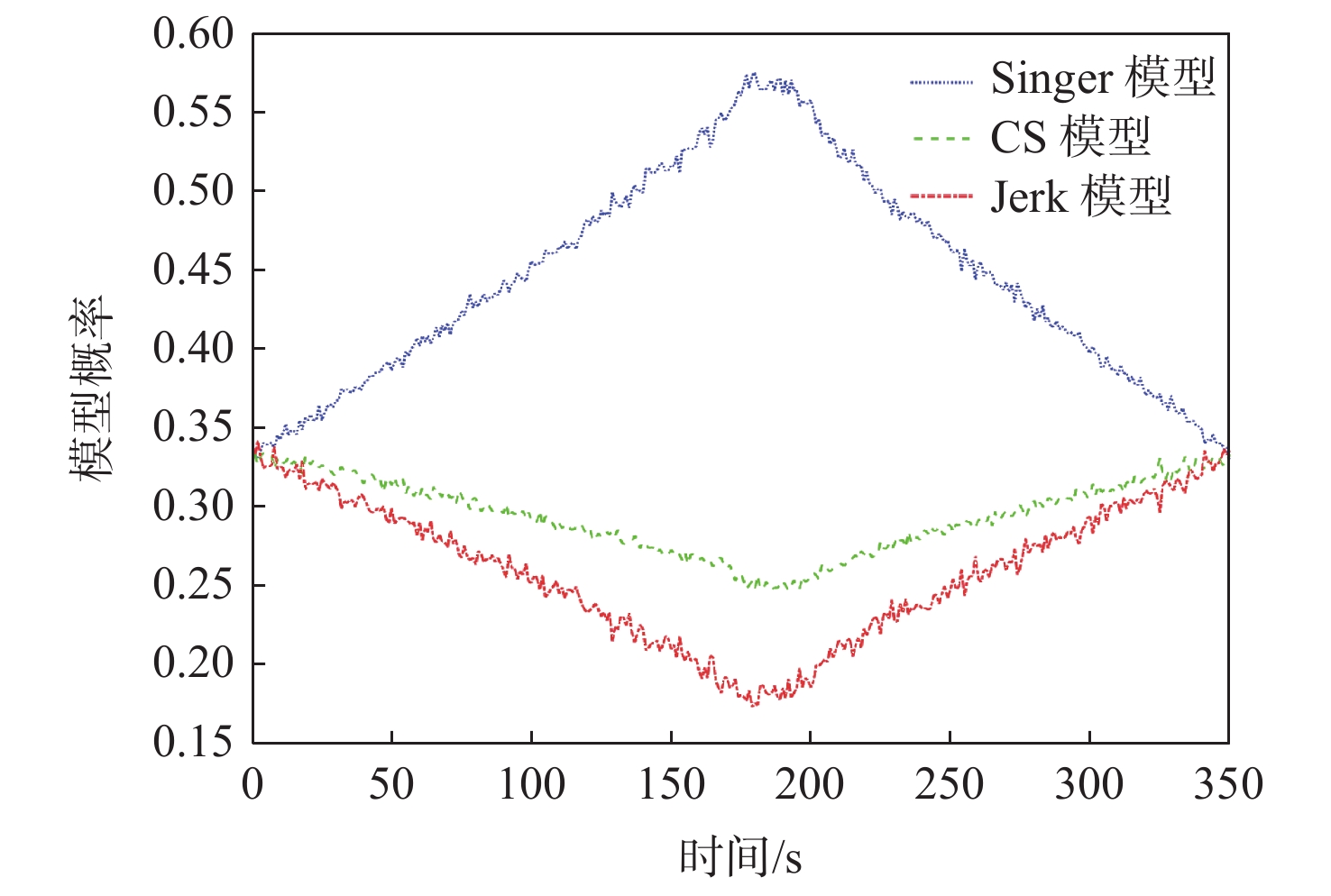
Hypersonic targets have complex motion states and high maneuverability. The conventional interactive multiple model (IMM) technique converges slowly and tracks poorly. Based on numerous fading variables, an adaptive interactive multiple model (AIMM) algorithm with strong tracking for cubature Kalman filter (CKF) is proposed. The structure of CKF is examined based on IMM-CKF, and the fading factor of the strong tracking algorithm is added to the covariance matrix of time updating and measurement updating. This allows for the online and real-time adjustment of the filter gain, which can lessen the decrease in filter accuracy brought on by model mismatch. Choose the Singer, ‘current’ and Jerk models from the IMM model collection. These models introduce singular value decomposition (SVD) decomposition as a solution to the issue that the model dimension expansion prevents Cholesky decomposition in CKF. An adaptive algorithm for Markov matrix in IMM algorithm is proposed. The transition probability is adaptively modified by the value of the model likelihood function to enhance the proportion of the matching model. Simulation results show that the proposed algorithm improves tracking convergence speed by 37.5% and tracking accuracy by 16.51%.

| [1] |
周宏仁, 敬忠良, 王培德, 等. 机动目标跟踪[M]. 北京: 国防工业出版社, 1991: 1-35.
ZHOU H R, JING Z L, WANG P D, et al. Maneuvering target tracking[M]. Beijing: National Defense Industry Press, 1991: 1-35(in Chinese).
|
| [2] |
SINGER R A. Estimating optimal tracking filter performance for manned maneuvering targets[J]. IEEE Transactions on Aerospace and Electronic Systems, 1970, AES-6(4): 473-483. doi: 10.1109/TAES.1970.310128
|
| [3] |
周宏仁. 机动目标“当前” 统计模型与自适应跟踪算法[J]. 航空学报, 1983, 4(1): 73-86. doi: 10.3321/j.issn:1000-6893.1983.01.013
ZHOU H R. A “current” statistical model and adaptive tracking algorithm for maneuvering targets[J]. Acta Aeronautica et Astronautica Sinica, 1983, 4(1): 73-86(in Chinese). doi: 10.3321/j.issn:1000-6893.1983.01.013
|
| [4] |
MEHROTRA K, MAHAPATRA P R. A Jerk model for tracking highly maneuvering targets[J]. IEEE Transactions on Aerospace and Electronic Systems, 1997, 33(4): 1094-1105. doi: 10.1109/7.624345
|
| [5] |
王磊, 程向红, 李双喜, 等. 自适应交互式多模型AUV组合导航算法[J]. 中国惯性技术学报, 2016, 24(4): 511-516.
WANG L, CHENG X H, LI S X, et al. Adaptive interacting multiple model filter for AUV integrated navigation[J]. Journal of Chinese Inertial Technology, 2016, 24(4): 511-516(in Chinese).
|
| [6] |
MAGILL D. Optimal adaptive estimation of sampled stochastic processes[J]. IEEE Transactions on Automatic Control, 1965, 10(4): 434-439. doi: 10.1109/TAC.1965.1098191
|
| [7] |
BLOM H A P. An efficient filter for abruptly changing systems[C]// Proceedings of the 23rd IEEE Conference on Decision and Control. Piscataway: IEEE Press, 1984: 656-658.
|
| [8] |
LI X R, BAR-SHALOM Y. Design of an interacting multiple model algorithm for air traffic control tracking[J]. IEEE Transactions on Control Systems Technology, 1993, 1(3): 186-194. doi: 10.1109/87.251886
|
| [9] |
黄景帅, 李永远, 汤国建, 等. 高超声速滑翔目标自适应跟踪方法[J]. 航空学报, 2020, 41(9): 323786. doi: 10.7527/S1000-6893.2020.23786
HUANG J S, LI Y Y, TANG G J, et al. Adaptive tracking method for hypersonic glide target[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(9): 323786(in Chinese). doi: 10.7527/S1000-6893.2020.23786
|
| [10] |
戴洪德, 方君, 唐亮, 等. 高超声速机动目标的强跟踪UKF自适应交互多模型算法[J]. 中国惯性技术学报, 2018, 26(3): 338-345.
DAI H D, FANG J, TANG L, et al. Strong tracking UKF adaptive interacting multiple-model algorithm based on maneuvering hypersonic-target tracking[J]. Journal of Chinese Inertial Technology, 2018, 26(3): 338-345(in Chinese).
|
| [11] |
戴定成, 姚敏立, 蔡宗平, 等. 改进的马尔可夫参数自适应IMM算法[J]. 电子学报, 2017, 45(5): 1198-1205. doi: 10.3969/j.issn.0372-2112.2017.05.024
DAI D C, YAO M L, CAI Z P, et al. Improved adaptive Markov IMM algorithm[J]. Acta Electronica Sinica, 2017, 45(5): 1198-1205(in Chinese). doi: 10.3969/j.issn.0372-2112.2017.05.024
|
| [12] |
肖楚晗, 李炯, 雷虎民, 等. 基于AVSIMM算法的高超声速再入滑翔目标跟踪[J]. 北京航空航天大学学报, 2019, 45(2): 413-421.
XIAO C H, LI J, LEI H M, et al. Hypersonic reentry gliding target tracking based on AVSIMM algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(2): 413-421(in Chinese).
|
| [13] |
王姚宇, 陈仁文, 张祥. 改进的基于奇异值分解的抗差容积卡尔曼滤波算法在全球定位导航中的应用[J]. 科学技术与工程, 2021, 21(6): 2356-2362. doi: 10.3969/j.issn.1671-1815.2021.06.032
WANG Y Y, CHEN R W, ZHANG X. Application of improved robust singular value decomposition-cubature Kalman filter algorithm in global positioning system navigation[J]. Science Technology and Engineering, 2021, 21(6): 2356-2362(in Chinese). doi: 10.3969/j.issn.1671-1815.2021.06.032
|
| [14] |
贾晓娟. 高超声速飞行器再入轨迹估计与跟踪[D]. 西安: 西北工业大学, 2015: 18-22.
JIA X J. Reentry trajectory estimating and tracking for hypersonic vehicle[D]. Xi’an: Northwestern Polytechnical University, 2015: 18-22(in Chinese) .
|
| [15] |
缪天宇. 助推滑翔式高超声速飞行器雷达探测与跟踪预报算法研究[D]. 哈尔滨: 哈尔滨工业大学, 2017: 11-13.
MIAO T Y. Research on radar detection, tracking and prediction algorithm for the boost-glide hypersonic vehicle[D]. Harbin: Harbin Institute of Technology, 2017: 11-13(in Chinese) .
|
| [16] |
ARASARATNAM I, HAYKIN S. Cubature Kalman filters[J]. IEEE Transactions on Automatic Control, 2009, 54(6): 1254-1269. doi: 10.1109/TAC.2009.2019800
|
| [17] |
秦雷, 李君龙, 周荻. 临近空间非弹道式目标HTV-2跟踪滤波与预报问题[J]. 航天控制, 2015, 33(2): 56-61. doi: 10.3969/j.issn.1006-3242.2015.02.010
QIN L, LI J L, ZHOU D. The problems of tracking filter and prediction for non-ballistic target HTV-2 in the near space[J]. Aerospace Control, 2015, 33(2): 56-61(in Chinese). doi: 10.3969/j.issn.1006-3242.2015.02.010
|
| [18] |
MENG Q H, HOU B W, LI D, et al. Performance analysis and comparison for high maneuver target track based on different Jerk models[J]. Journal of Control Science and Engineering, 2018, 2018: 6432485.
|
| [19] |
李广华. 高超声速滑翔飞行器运动特性分析及弹道跟踪预报方法研究[D]. 长沙: 国防科学技术大学, 2016: 19-20.
LI G H. Motion characteristics analysis and trajectory prediction for hypersonic glide vehicles[D]. Changsha: National University of Defense Technology, 2016: 19-20(in Chinese) .
|
Figures(24) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: