| Citation: | LIU Z Y,ZHANG G,LIU H R,et al. Software robot-based application behavior simulation for cyber security range in industrial control field[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(7):2237-2244 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0597

|
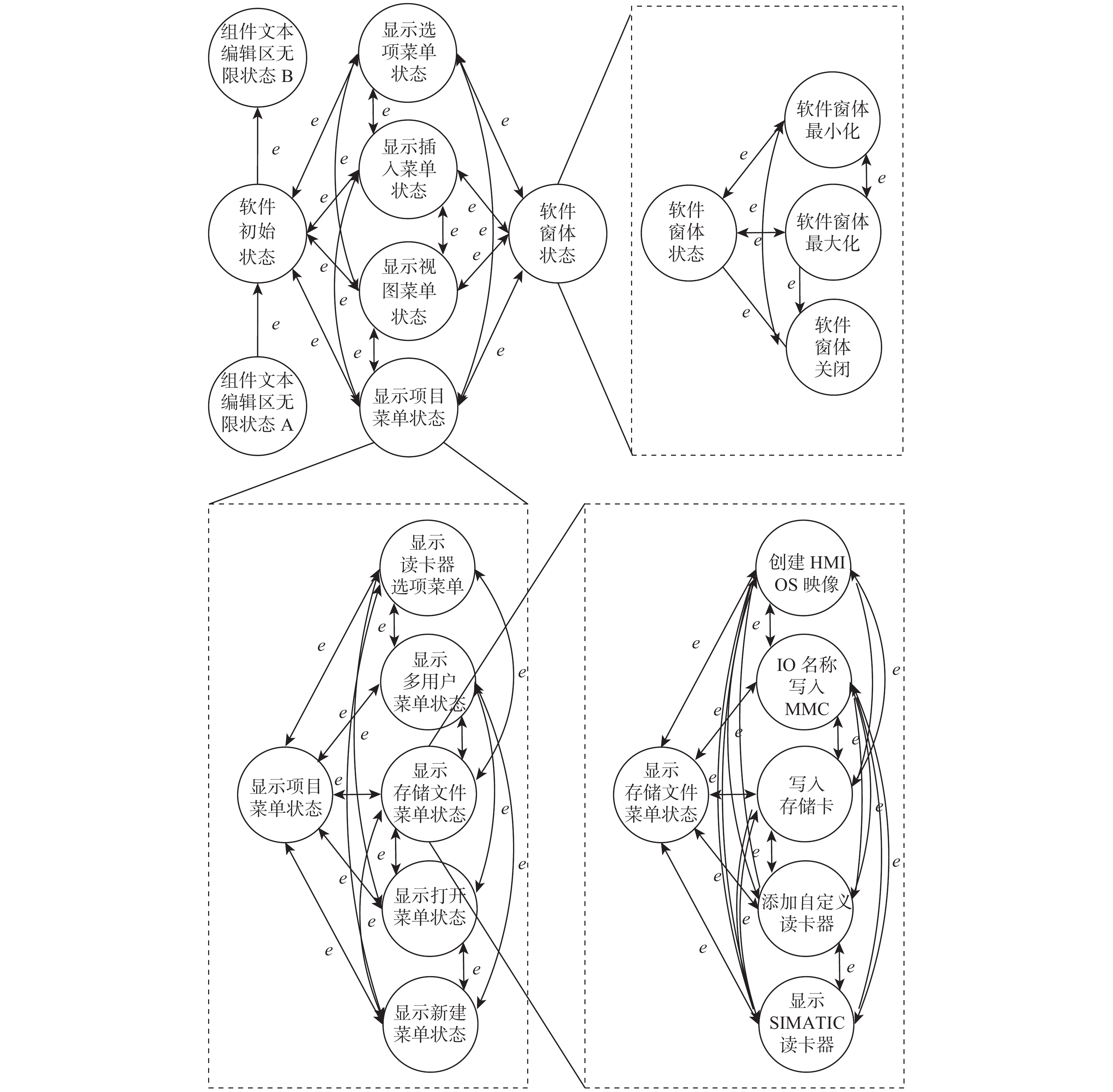
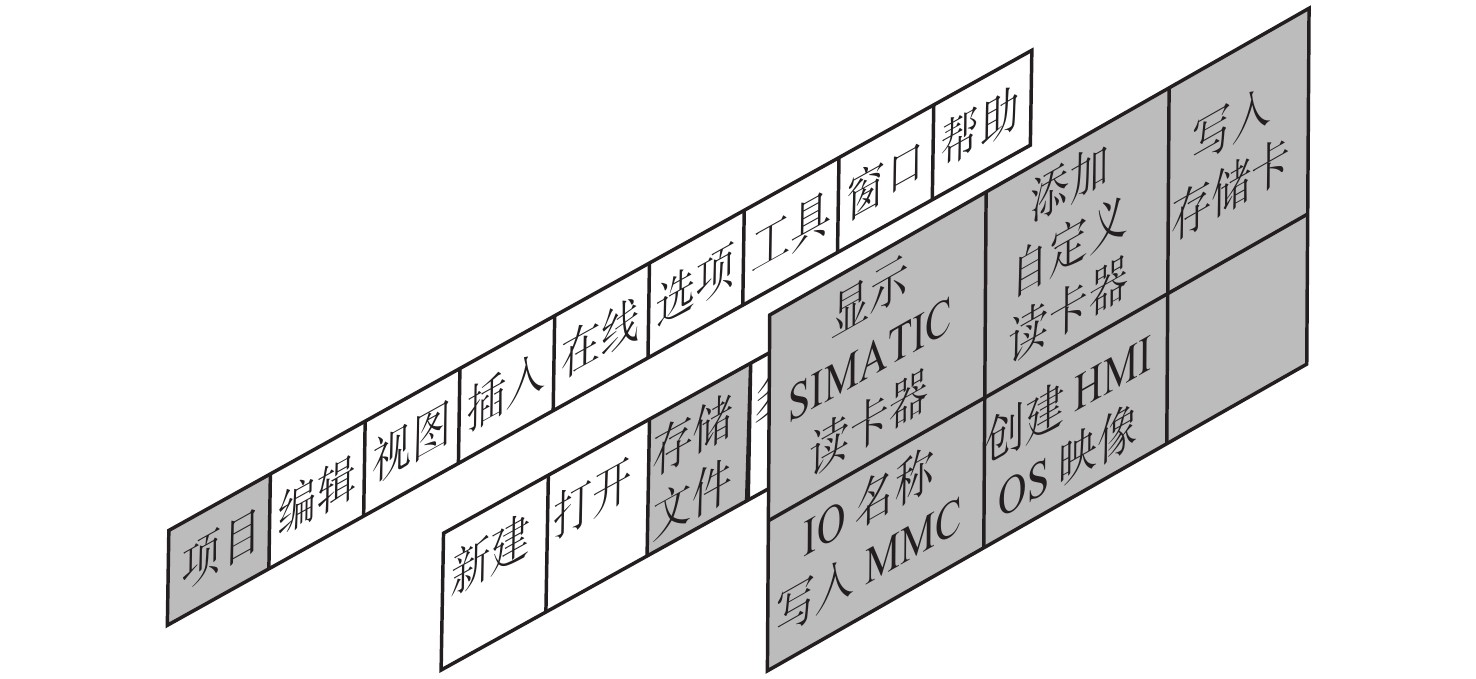
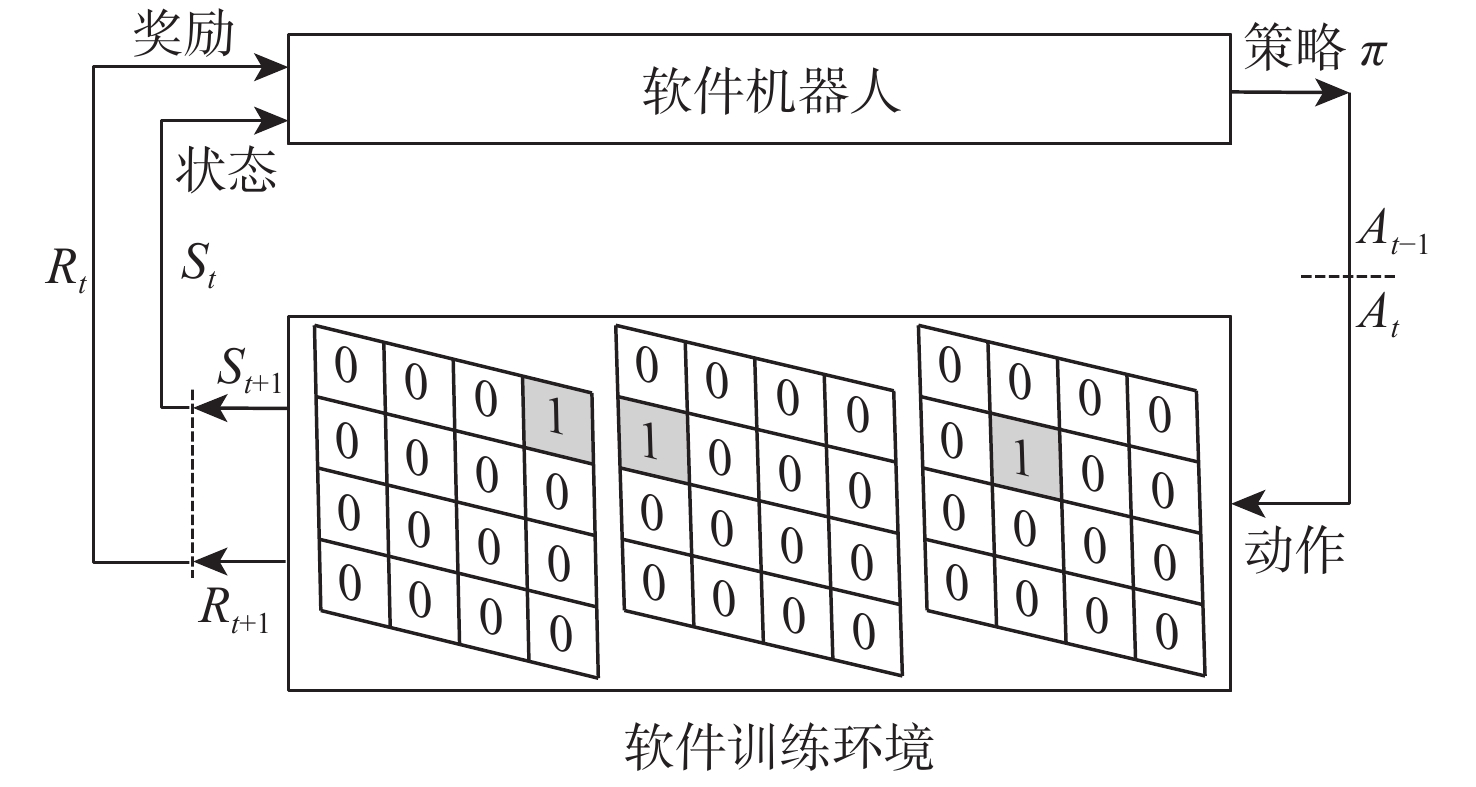
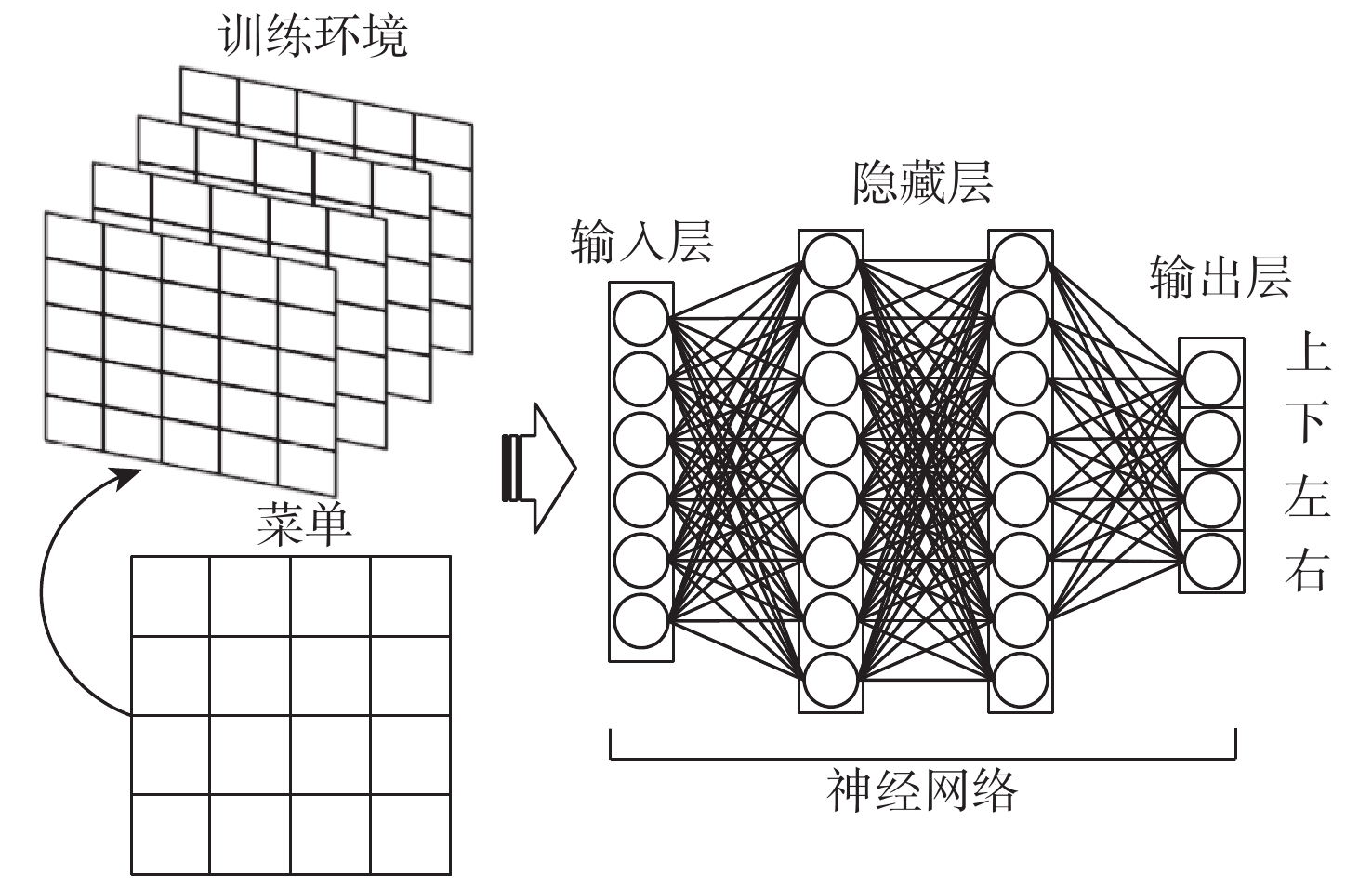
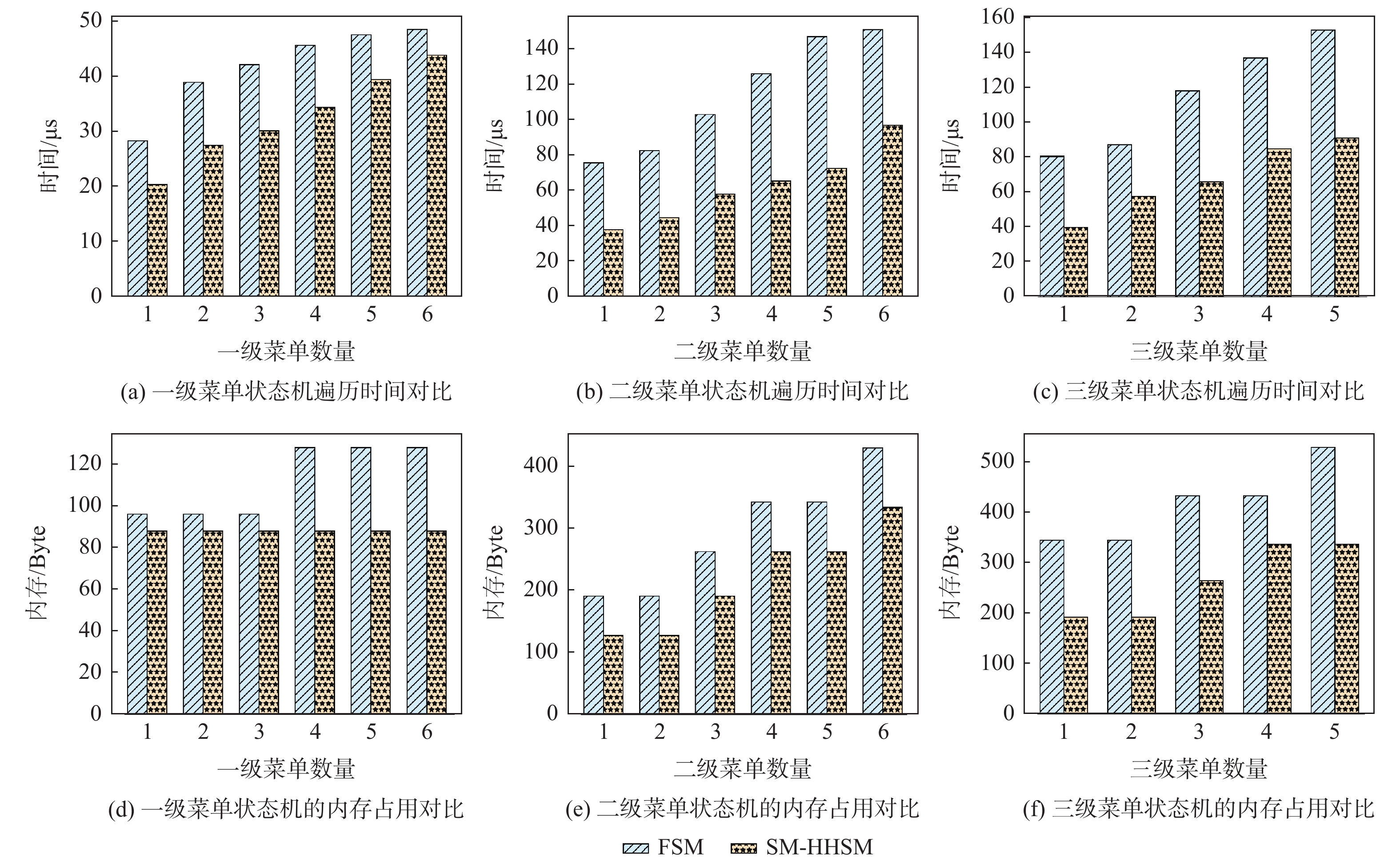
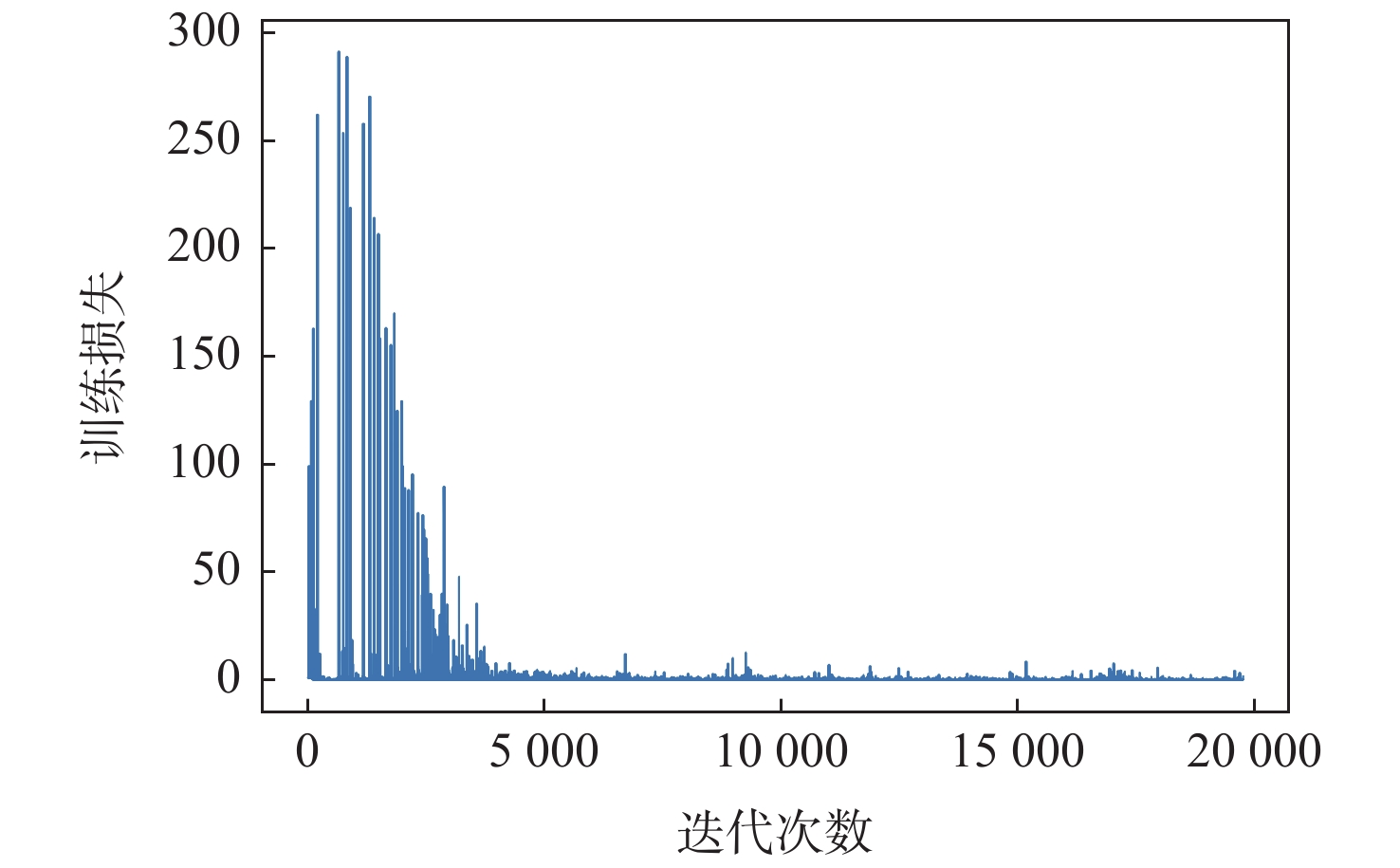
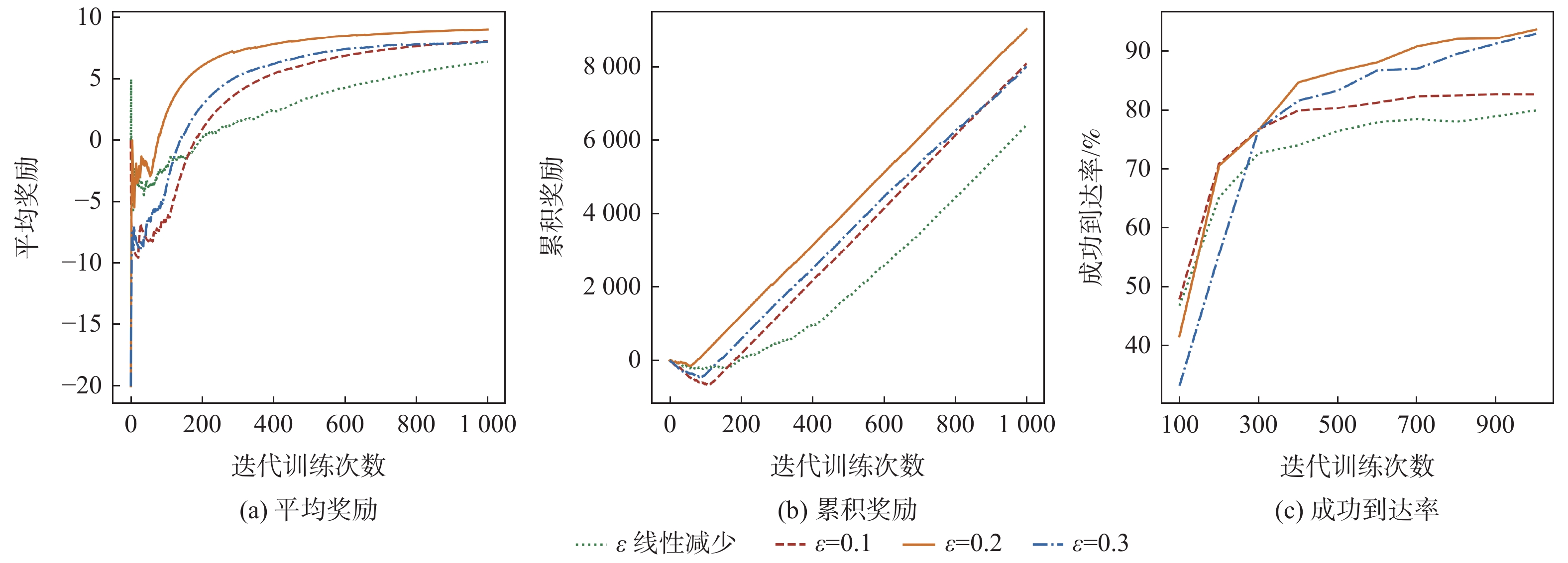
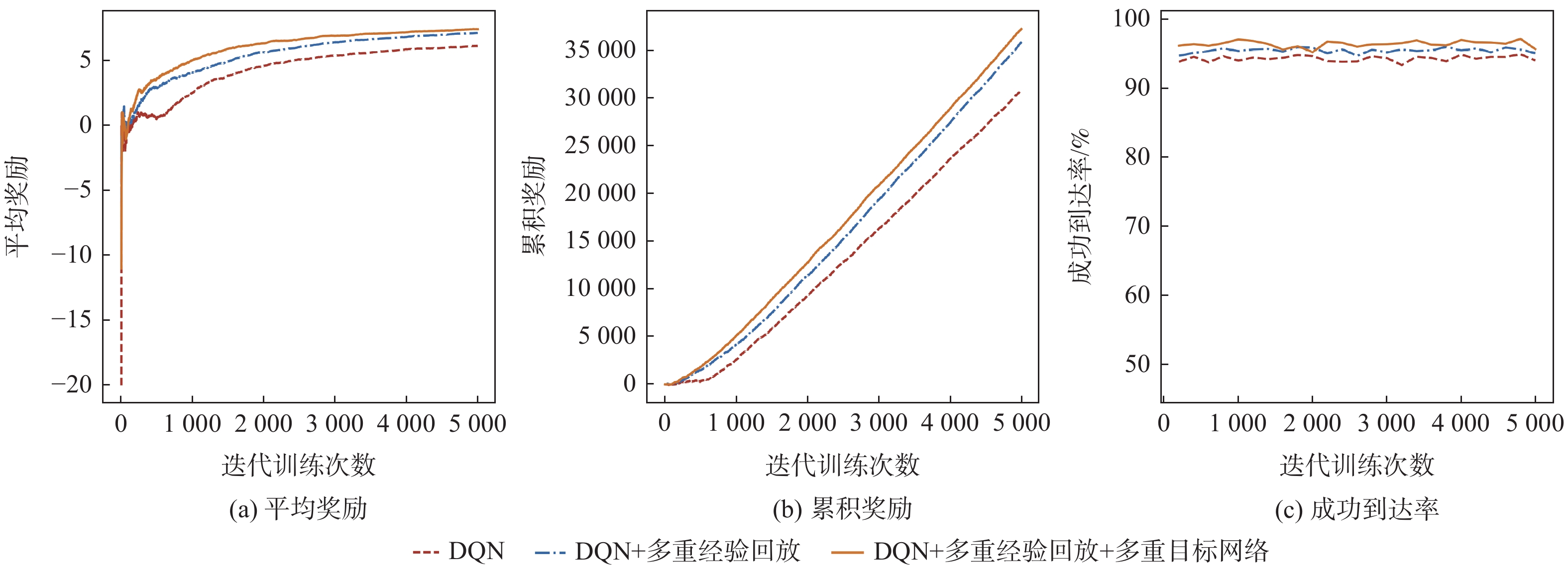
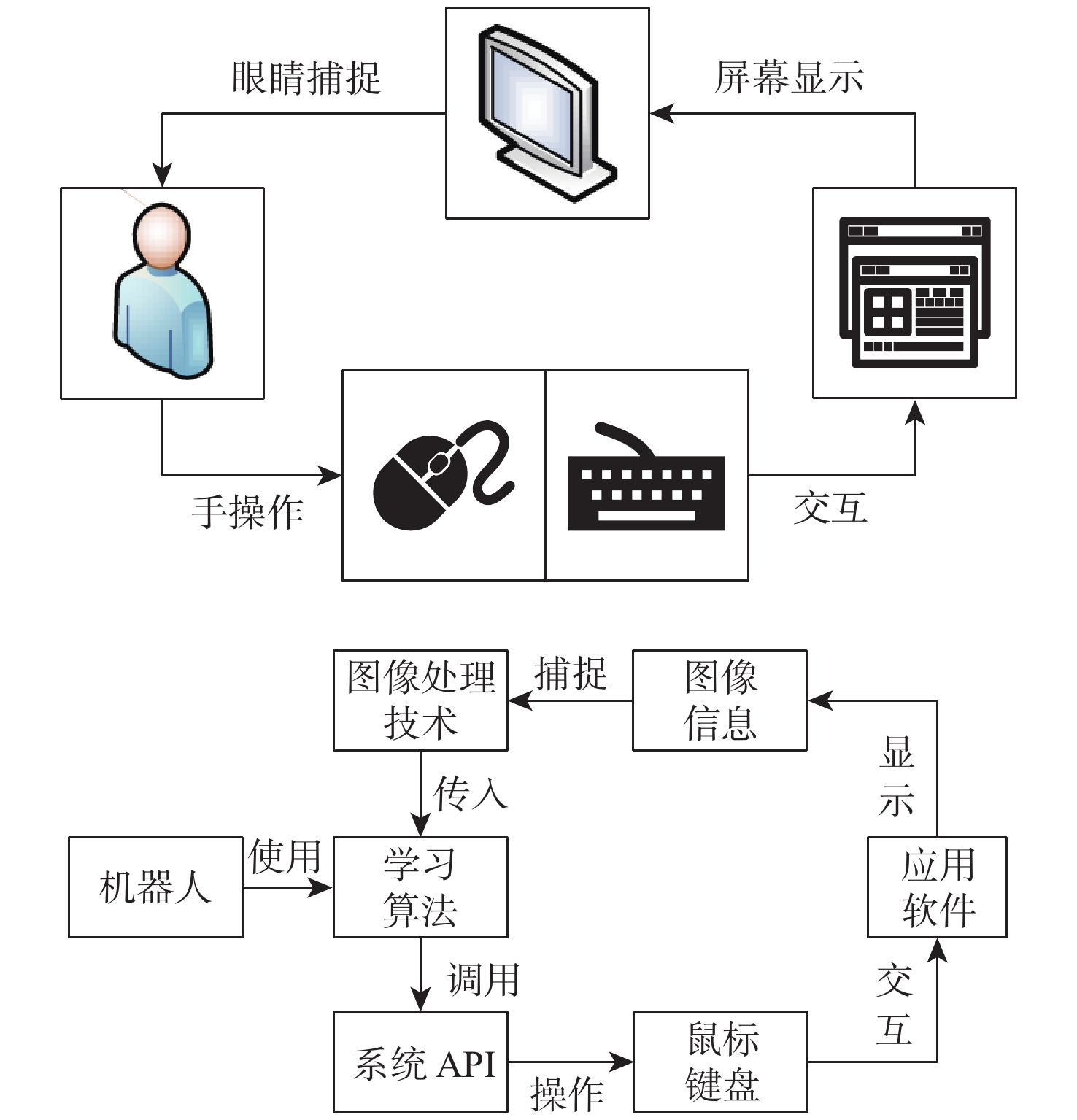
The cyber security range in the industrial control field provides important support for studies on industrial control system (ICS) security. The application behavior simulation is a crucial task for the cyber security range in the industrial control field. Therefore, a software robot method was proposed to realistically simulate the application behavior for the cyber security range in the industrial control field. By considering software graphical interfaces and explicit and implicit software rules, a software menu acquisition algorithm based on scale invariant feature transform (SIFT) for image similarity, as well as a hybrid hierarchical state machine model was developed to model application behaviors. In view of the intelligent problem of the software robot, a deep Q network (DQN) algorithm was utilized to drive the software robot to autonomously learn the application behavior. At the same time, the DQN algorithm was optimized by combining multiple experience replays and multiple target networks. The experiment results show that the software robot based on DQN can effectively learn the industrial control software, and the optimized DQN algorithm has a better autonomous learning effect.

| [1] |
方滨兴, 贾焰, 李爱平, 等. 网络空间靶场技术研究[J]. 信息安全学报, 2016, 1(3): 1-9.
FANG B X, JIA Y, LI A P, et al. Cyber ranges: State-of-the-art and research challenges[J]. Journal of Cyber Security, 2016, 1(3): 1-9(in Chinese).
|
| [2] |
王佰玲, 刘红日, 张耀方, 等. 工业控制系统安全仿真关键技术研究综述[J]. 系统仿真学报, 2021, 33(6): 1466-1488.
WANG B L, LIU H R, ZHANG Y F, et al. Review on key technologies of industrial control system security simulation[J]. Journal of System Simulation, 2021, 33(6): 1466-1488(in Chinese).
|
| [3] |
OZKAYA M. Analysing UML-based software modelling languages[J]. Journal of Aeronautics and Space Technologies, 2018, 11(2): 119-134.
|
| [4] |
KOSE M A, OZKAYA M. Towards extending UML’s activity diagram for the architectural modeling, analysis, and implementation[C]//Proceedings of the Federated Conference on Computer Science and Information Systems. Piscataway: IEEE Press, 2020: 639-648.
|
| [5] |
BOUTEKKOUK F. Architecture description languages taxonomies review: A special focus on self-adaptive distributed embedded systems[J]. International Journal of Technology Diffusion, 2021, 12(1): 53-74. doi: 10.4018/IJTD.2021010103
|
| [6] |
SMOLYAKOV I Y, BELYAEV S A. Design of the software architecture for starcraft video game on the basis of finite state machines[C]//Proceedings of the IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering. Piscataway: IEEE Press, 2019: 356-359.
|
| [7] |
LEE E, KIM Y G, SEO Y D, et al. RINGA: Design and verification of finite state machine for self-adaptive software at runtime[J]. Information and Software Technology, 2018, 93: 200-222. doi: 10.1016/j.infsof.2017.09.008
|
| [8] |
MARTÍN A G, FERNÁNDEZ-ISABEL A, DE DIEGO I M, et al. A survey for user behavior analysis based on machine learning techniques: Current models and applications[J]. Applied Intelligence, 2021, 51(8): 6029-6055. doi: 10.1007/s10489-020-02160-x
|
| [9] |
LIAN J. Implementation of computer network user behavior forensic analysis system based on speech data system log[J]. International Journal of Speech Technology, 2020, 23(3): 559-567. doi: 10.1007/s10772-020-09747-2
|
| [10] |
ZHAO X, BHUIYAN M Z A, QI L Y, et al. TrCMP: A dependable app usage inference design for user behavior analysis through cyber-physical parameters[J]. Journal of Systems Architecture, 2020, 102: 101665. doi: 10.1016/j.sysarc.2019.101665
|
| [11] |
REN F J, BAO Y W. A review on human-computer interaction and intelligent robots[J]. International Journal of Information Technology & Decision Making, 2020, 19(1): 5-47.
|
| [12] |
MU F R, LIU C Y. Design and research of intelligent logistics robot based on STM32[J]. Recent Advances in Electrical & Electronic Engineering, 2021, 14(1): 44-51.
|
| [13] |
BAI X J, DING X Y, WU M X. Intelligent classification robot based on image recognition[C]//Proceedings of the International Conference on Optoelectronic Materials and Devices. Bellinham: SPIE, 2021: 117671M.
|
| [14] |
WANG T M, TAO Y, LIU H. Current researches and future development trend of intelligent robot: A review[J]. International Journal of Automation and Computing, 2018, 15(5): 525-546. doi: 10.1007/s11633-018-1115-1
|
| [15] |
HE W, LI Z J, CHEN C L P. A survey of human-centered intelligent robots: Issues and challenges[J]. IEEE/CAA Journal of Automatica Sinica, 2017, 4(4): 602-609. doi: 10.1109/JAS.2017.7510604
|
| [16] |
LOWE D G. Distinctive image features from scale-invariant keypoints[J]. International Journal of Computer Vision, 2004, 60(2): 91-110. doi: 10.1023/B:VISI.0000029664.99615.94
|
Figures(10) / Tables(1)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: