| Citation: | WANG C,CHEN W J,CHEN W H,et al. Design of suspension weight-support rehabilitation system adapted to fluctuation of human center of gravity[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(7):2322-2330 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0605

|
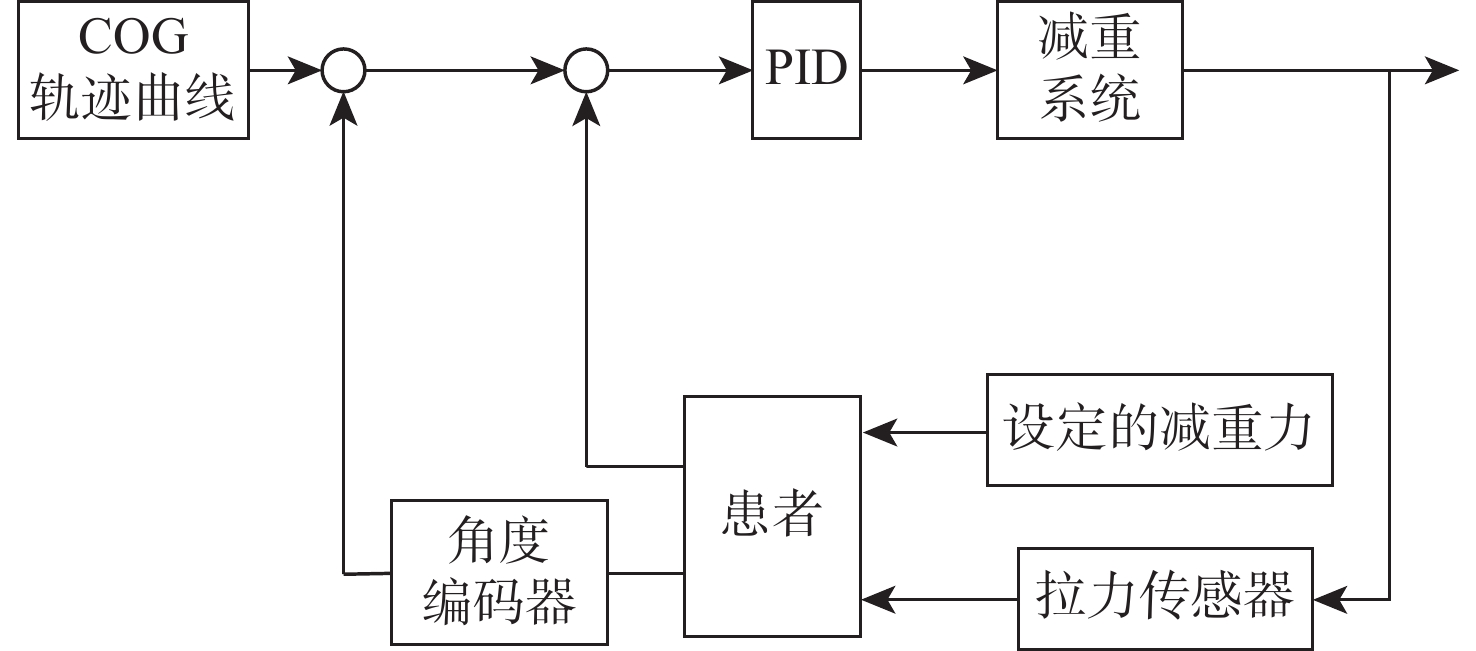
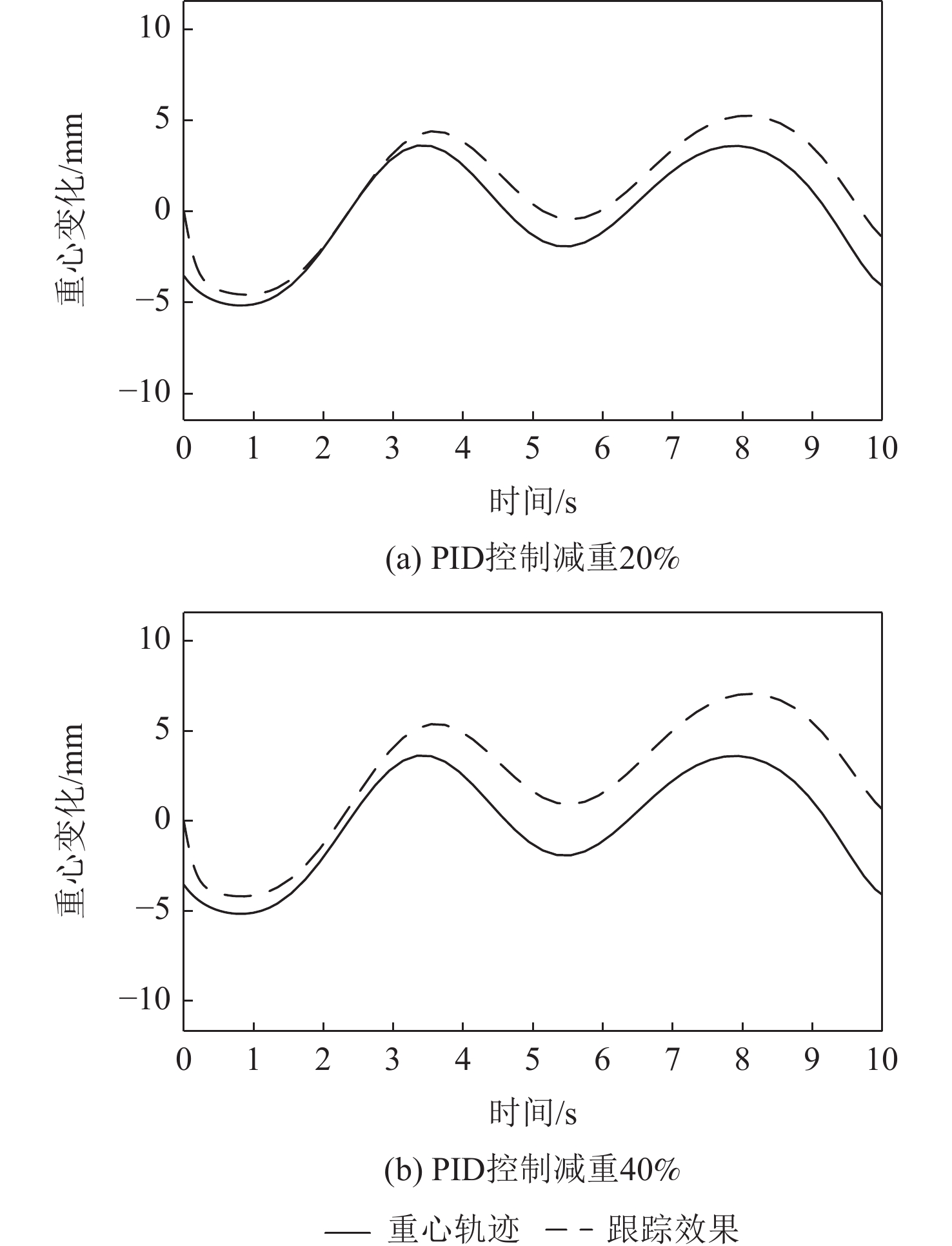
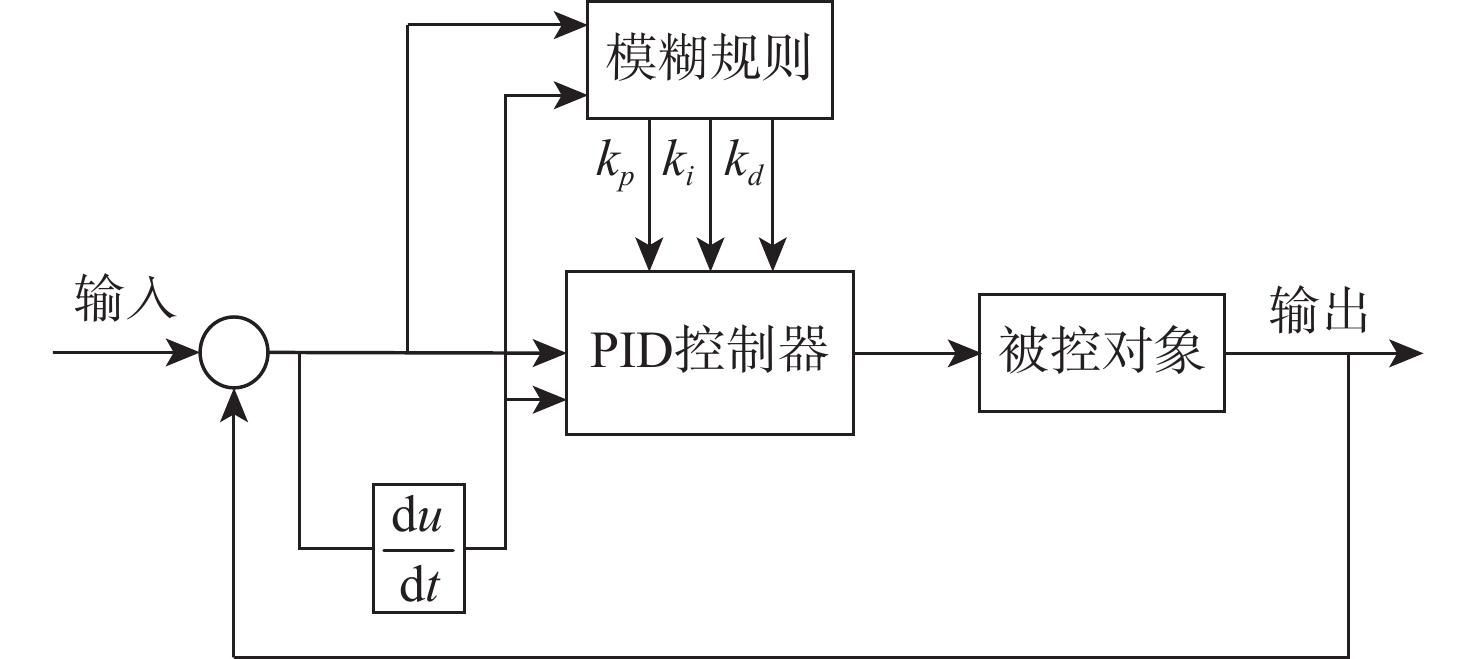
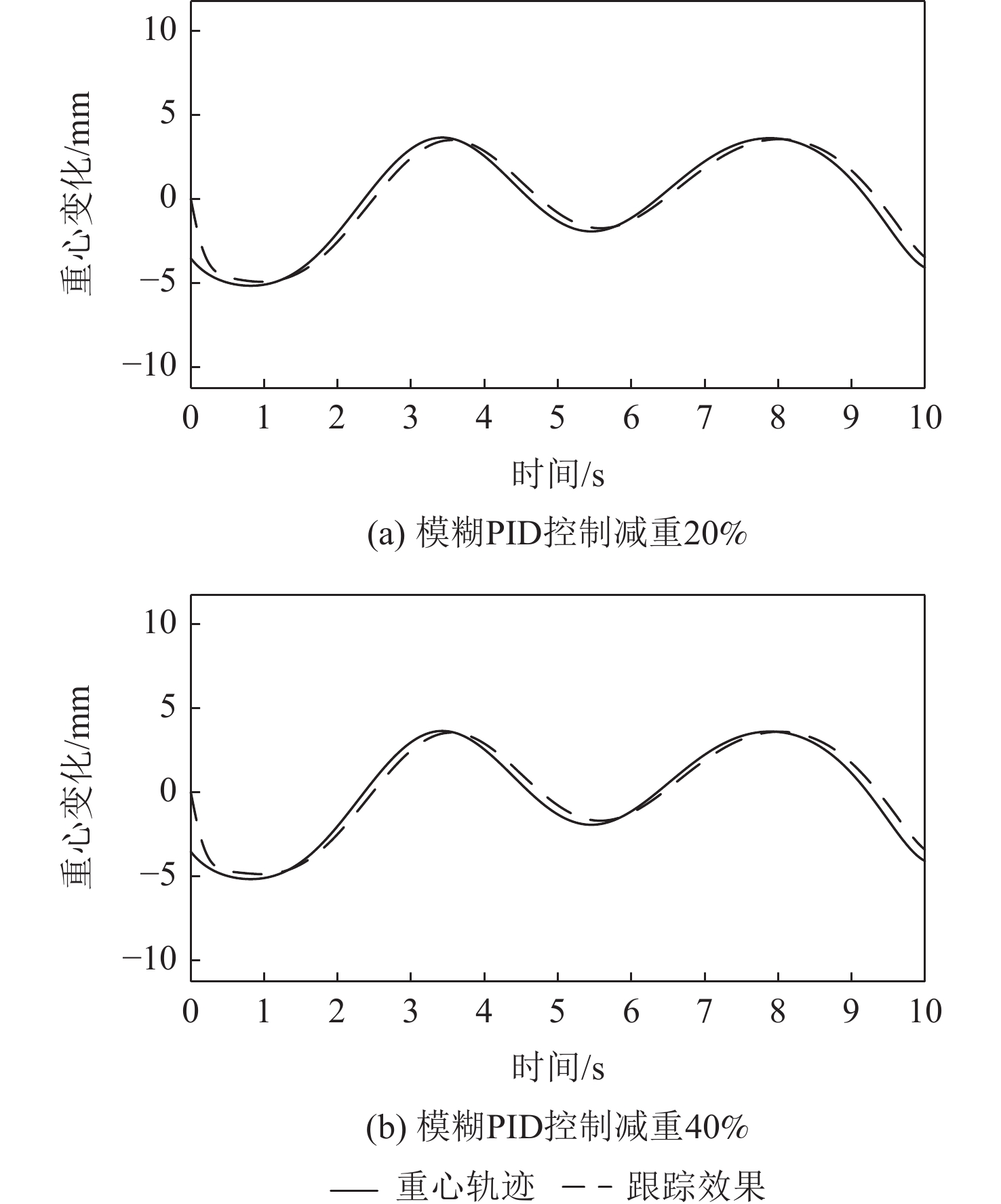
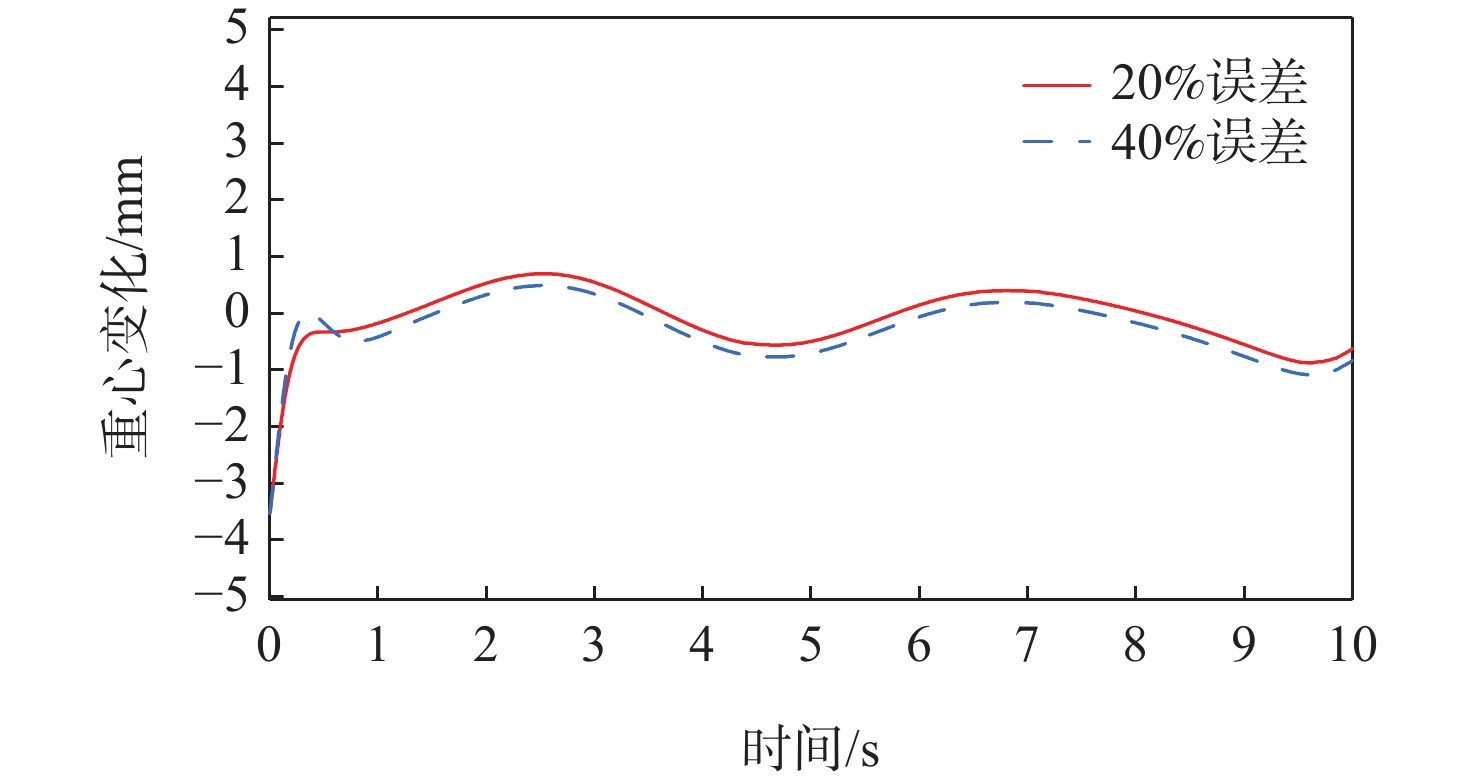
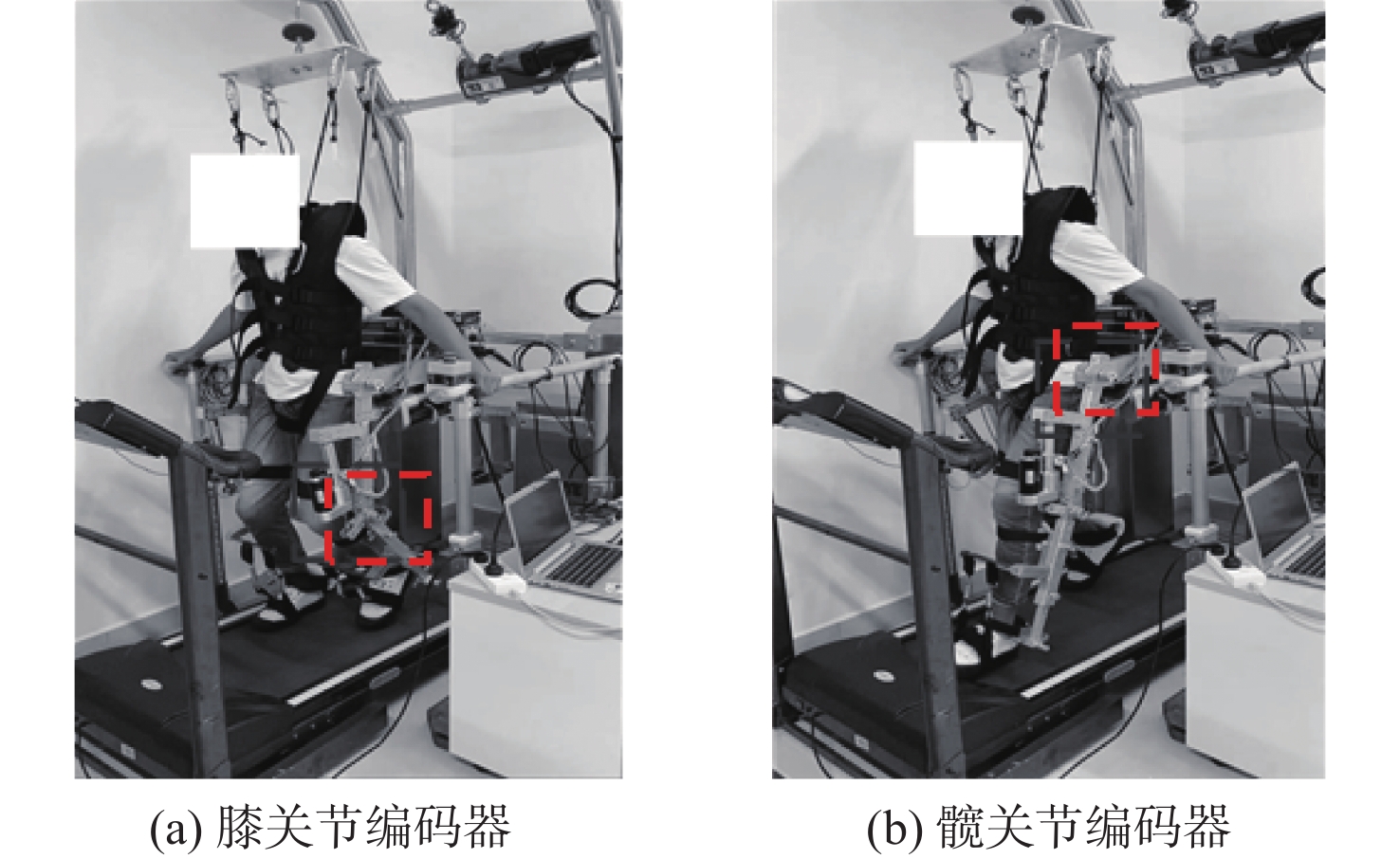
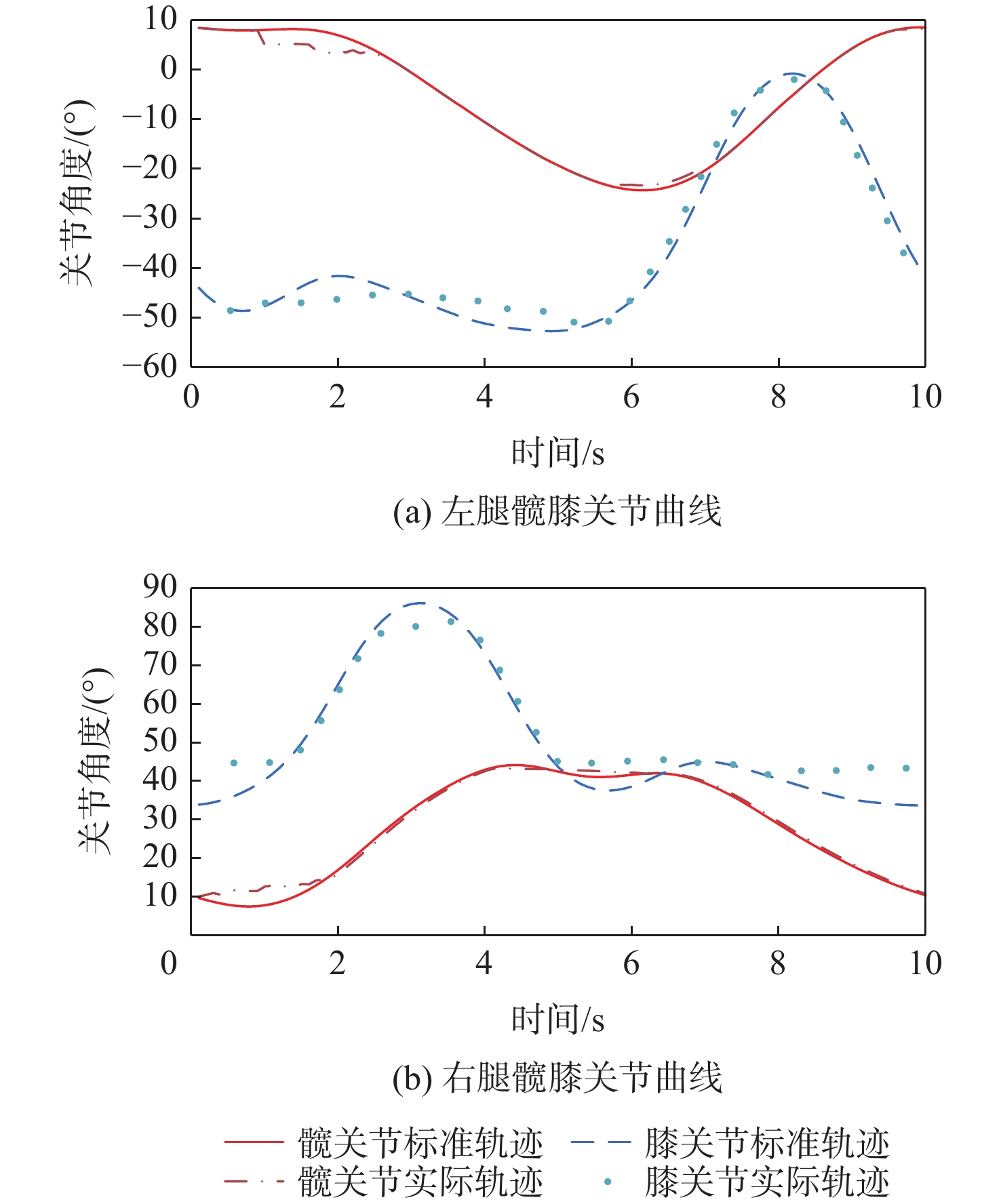
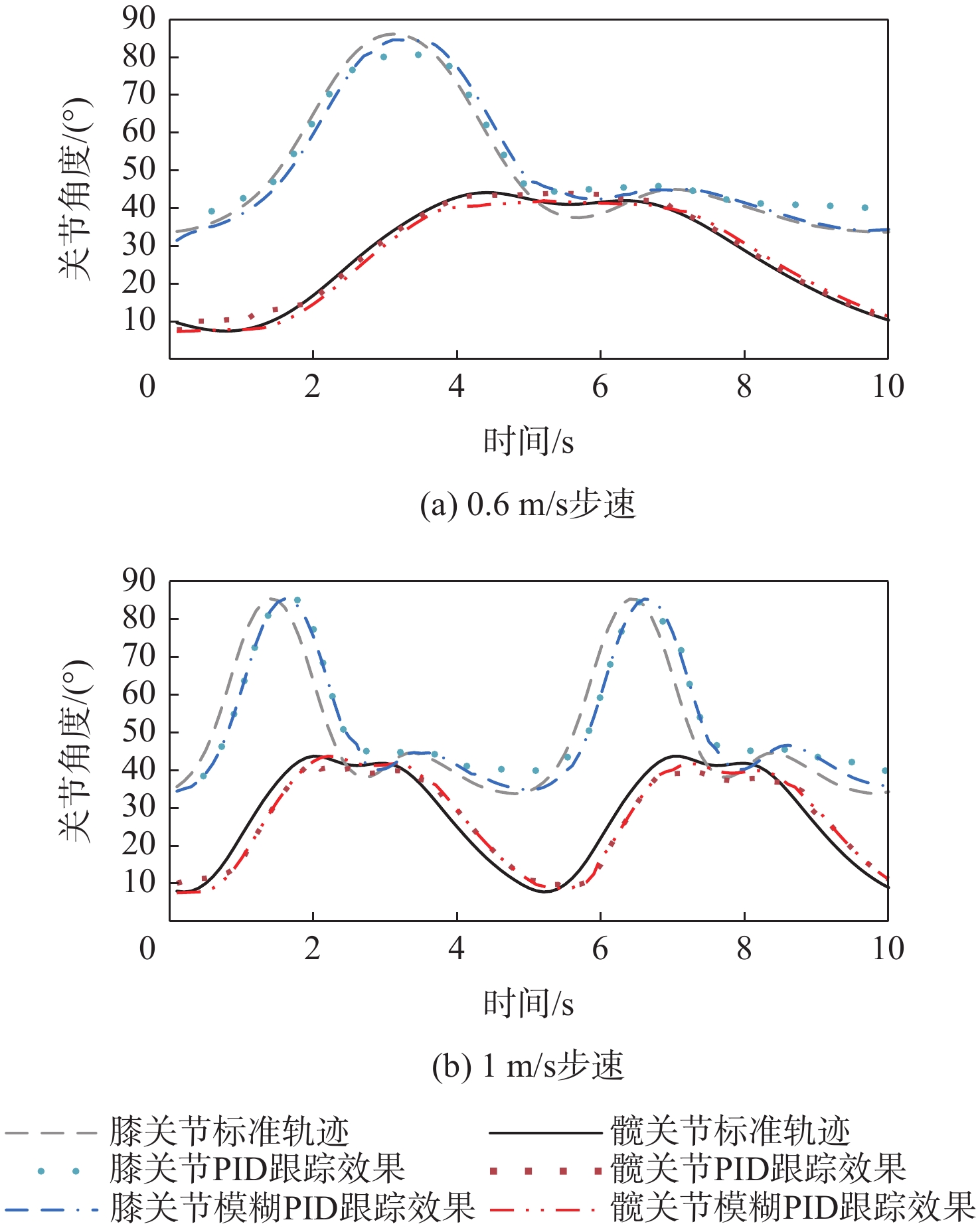
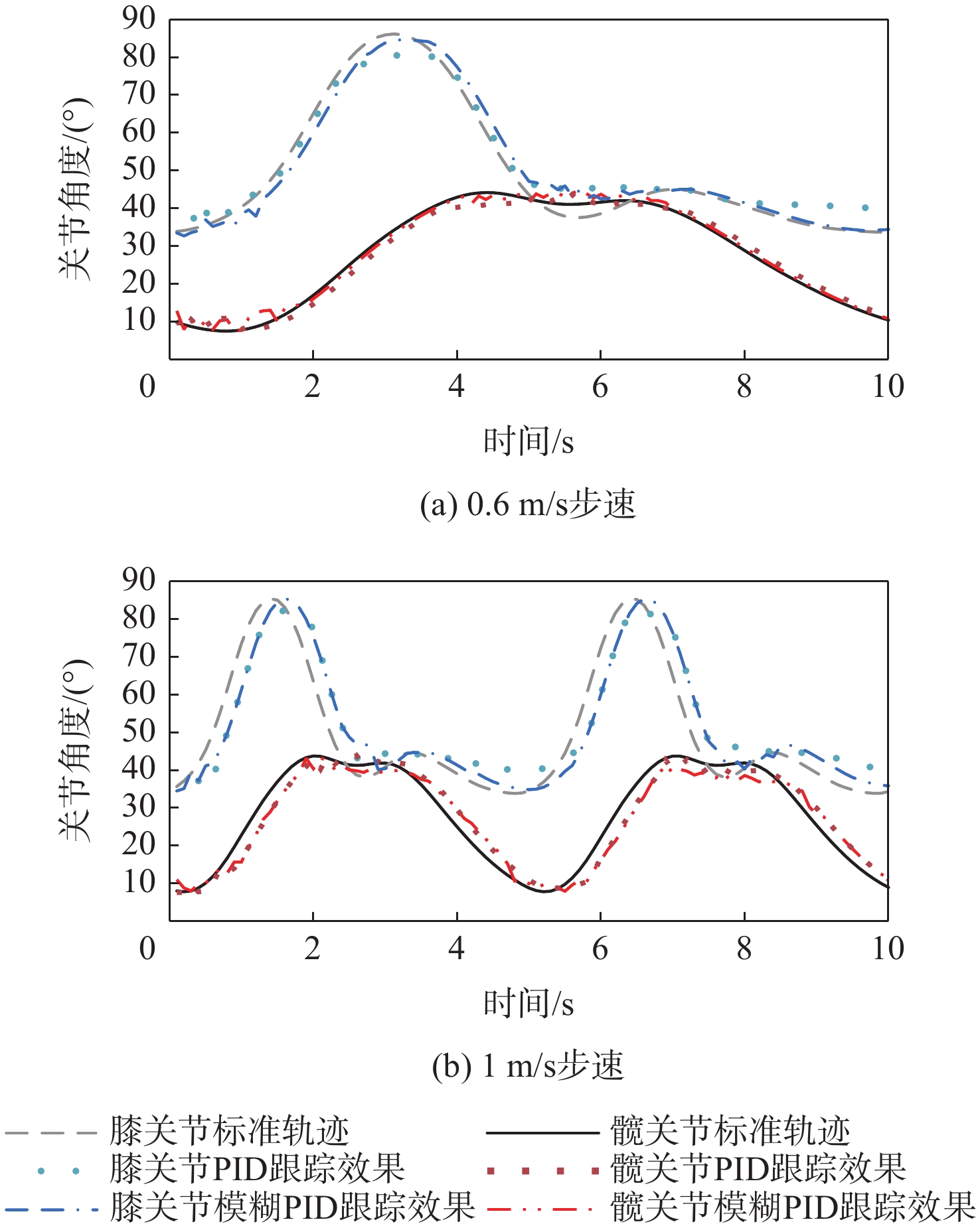
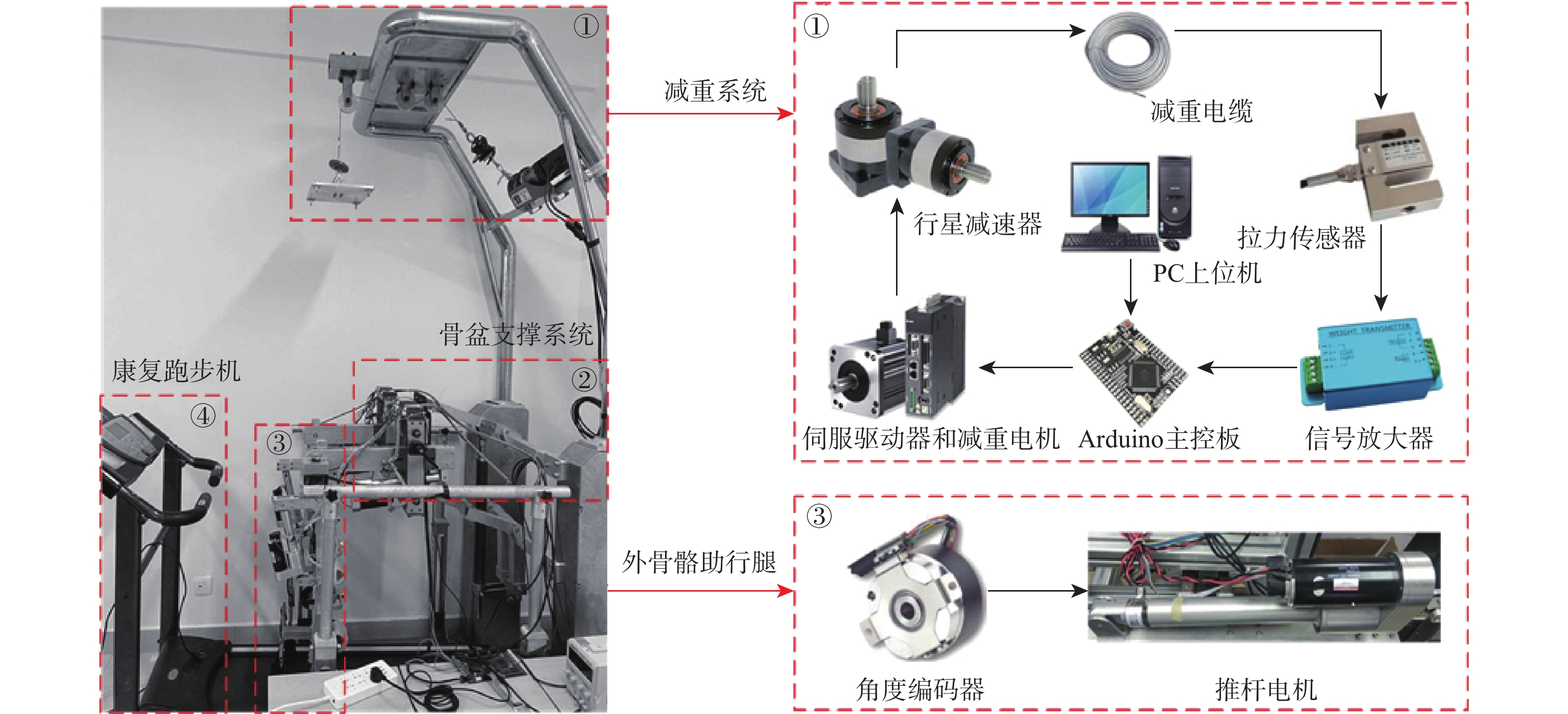
The training that patients undergoing lower limb rehabilitation receive in walking is significantly impacted by the body weight support system. Most of the existing lower limb rehabilitation exoskeleton weight support devices only consider how to reduce the percentage of the patient's body weight and ignore the heaving of the patient's center of gravity. Since the pelvic brace of the exoskeleton has a fixed motion trajectory in the vertical direction, small changes in the patient's gait may result in a mismatch between the height of the center of gravity and the motion trajectory of the pelvic brace. This difference can be imposed on the patient's pelvic position, affecting the movement of the lower limb joints and creating additional risks. To solve this problem, plantar pressure was collected to predict the change of center of gravity position, and the obtained center of gravity trajectory was used to calculate the support force that should be applied, so as to provide safe and effective weight reduction for patient training. The feasibility of this method has been verified by simulation and practical verification of the developed exoskeleton support system. When using conventional body weight support, the fuzzy controller’s error in tracking the trajectory of the center of gravity is reduced by 21.2% compared to PID control, the steady-state error is maintained within a 1 mm range, and the range of motion of the hip and knee is increased by 14.36% and 13.77%, respectively.

| [1] |
DONG Z H, LUCES J V S, HIRATA Y. Control and evaluation of body weight support walker for overground gait training[J]. IEEE Robotics and Automation Letters, 2021, 6(3): 4632-4639. doi: 10.1109/LRA.2021.3068691
|
| [2] |
KOYAMA T, KAI Y. Development of a walking support system controlled by servo brakes[C]//Proceedings of the IEEE/SICE International Symposium on System Integration. Piscataway: IEEE Press, 2015: 1-6.
|
| [3] |
LU Q, LIANG J X, QIAO B, et al. A new active body weight support system capable of virtually offloading partial body mass[J]. IEEE/ASME Transactions on Mechatronics, 2013, 18(1): 11-20. doi: 10.1109/TMECH.2011.2160555
|
| [4] |
于宁波, 杨卓, 孙玉波, 等. 一种面向步态和平衡康复训练的单绳悬吊主动减重系统设计与控制方法研究[J]. 自动化学报, 2016, 42(12): 1819-1831.
YU N B, YANG Z, SUN Y B, et al. Design and control of an active gravity offloading system for rehabilitation training of gait and balance[J]. Acta Automatica Sinica, 2016, 42(12): 1819-1831(in Chinese).
|
| [5] |
GLAUSER M, LIN Z L, ALLAIRE P E. Modeling and control of a partial body weight support system: an output regulation approach[J]. IEEE Transactions on Control Systems Technology, 2010, 18(2): 480-490. doi: 10.1109/TCST.2009.2016953
|
| [6] |
PENNYCOTT A, WYSS D, VALLERY H, et al. Effects of added inertia and body weight support on lateral balance control during walking[C]//Proceedings of the IEEE International Conference on Rehabilitation Robotics. Piscataway: IEEE Press, 2011: 1-5.
|
| [7] |
何秉泽, 石萍, 李新伟, 等. 一种跟随人体重心高度的骨盆支撑减重康复系统[J]. 生物医学工程学杂志, 2022, 39(1): 175-184.
HE B Z, SHI P, LI X W, et al. A pelvic support weight rehabilitation system tracing the human center of mass height[J]. Journal of Biomedical Engineering, 2022, 39(1): 175-184(in Chinese).
|
| [8] |
LING Y, XUE Y, XING J G, et al. Experimental studies on static postural balance using the body center of gravity test system[C]//Proceedings of the First International Symposium on Future Information and Communication Technologies for Ubiquitous HealthCare. Piscataway: IEEE Press, 2013: 1-5.
|
| [9] |
SONG Z D, CHEN W, WANG W B, et al. Dynamic modeling and simulation of a body weight support system[J]. Journal of Healthcare Engineering, 2020, 2020: 2802574.
|
| [10] |
SHIMBA T. An estimation of center of gravity from force platform data[J]. Journal of Biomechanics, 1984, 17(1): 53-60. doi: 10.1016/0021-9290(84)90080-0
|
| [11] |
杨辉, 章亚男, 沈林勇, 等. 下肢康复机器人减重支撑系统的研究[J]. 机电工程, 2009, 26(7): 28-31. doi: 10.3969/j.issn.1001-4551.2009.07.009
YANG H, ZHANG Y N, SHEN L Y, et al. Research of the BWS system for lower extremity rehabilitation robot[J]. Journal of Mechanical & Electrical Engineering Magazine, 2009, 26(7): 28-31(in Chinese). doi: 10.3969/j.issn.1001-4551.2009.07.009
|
| [12] |
QIN T, ZHANG L X. Coordinated control strategy for robotic-assisted gait training with partial body weight support[J]. Journal of Central South University, 2015, 22(8): 2954-2962. doi: 10.1007/s11771-015-2831-0
|
| [13] |
BENDA B J, RILEY P O, KREBS D E. Biomechanical relationship between center of gravity and center of pressure during standing[J]. IEEE Transactions on Rehabilitation Engineering, 1994, 2(1): 3-10. doi: 10.1109/86.296348
|
| [14] |
梁旭, 王卫群, 苏婷婷, 等. 下肢康复机器人的主动柔顺自适应交互控制[J]. 机器人, 2021, 43(5): 547-556.
LIANG X, WANG W Q, SU T T, et al. Active compliant and adaptive interaction control for a lower limb rehabilitation robot[J]. Robot, 2021, 43(5): 547-556(in Chinese).
|
| [15] |
SHARMA K, PALWALIA D K. A modified PID control with adaptive fuzzy controller applied to DC motor[C]//Proceedings of the International Conference on Information, Communication, Instrumentation and Control. Piscataway: IEEE Press, 2017, 1: 1-6.
|
| [16] |
KRISHNAN P H, ARJUN M. Control of BLDC motor based on adaptive fuzzy logic PID controller[C]//Proceedings of the International Conference on Green Computing Communication and Electrical Engineering. Piscataway: IEEE Press, 2014: 1-5.
|
| [17] |
LIU B, YAO G, XIAO X B, et al. The research on self-adaptive fuzzy PID controller[J]. Applied Mechanics and Materials, 2013(373): 1462-1465.
|
| [18] |
ZHANG X, LI J H, OVUR S E, et al. Novel design and adaptive fuzzy control of a lower-limb elderly rehabilitation[J]. Electronics, 2020, 9(2): 1-17.
|
| [19] |
陈豫生, 张琴, 熊蔡华. 截瘫助行外骨骼研究综述: 从拟人设计依据到外骨骼研究现状[J]. 机器人, 2021, 43(5): 585-605.
CHEN Y S, ZHANG Q, XIONG C H. From anthropomorphic design basis to exoskeleton research status: A review on walking assist exoskeletons for paraplegics[J]. Robot, 2021, 43(5): 585-605(in Chinese).
|
Figures(15) / Tables(4)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: