| Citation: | TIAN M Y,SHEN Z J. Trajectory planning of re-entry gliding vehicle in a class of uncertain environment[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(8):2514-2523 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0640

|
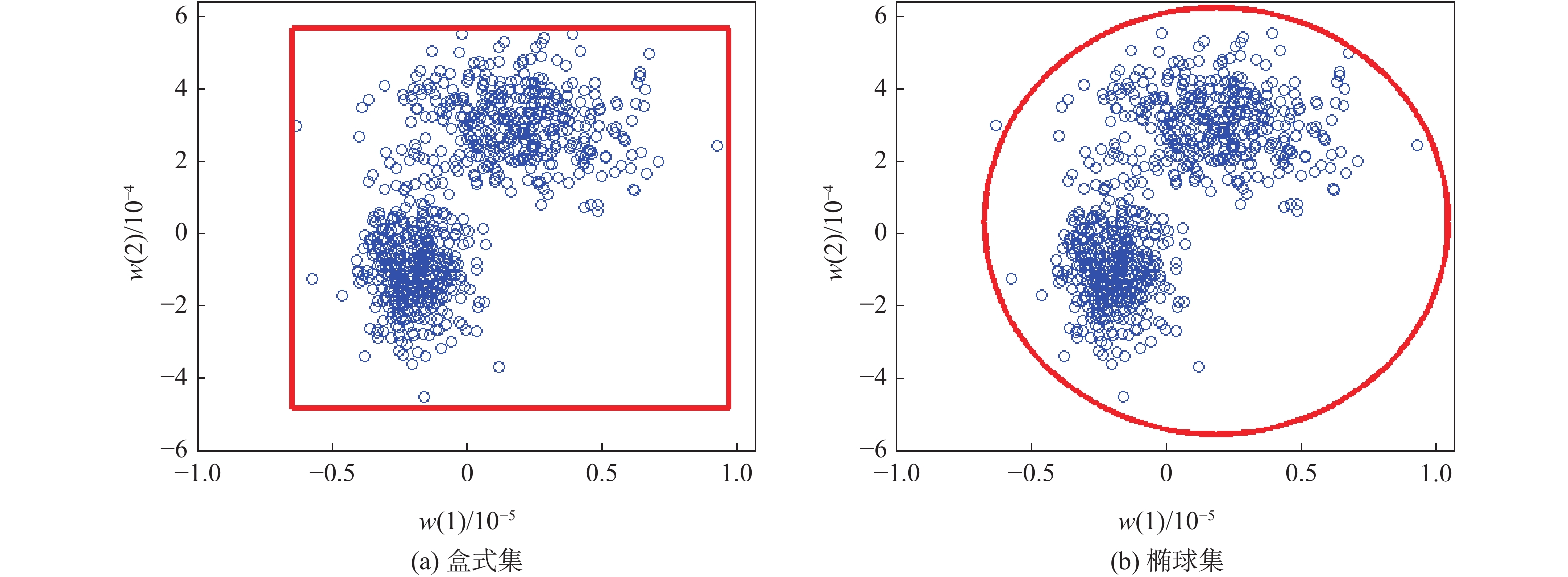
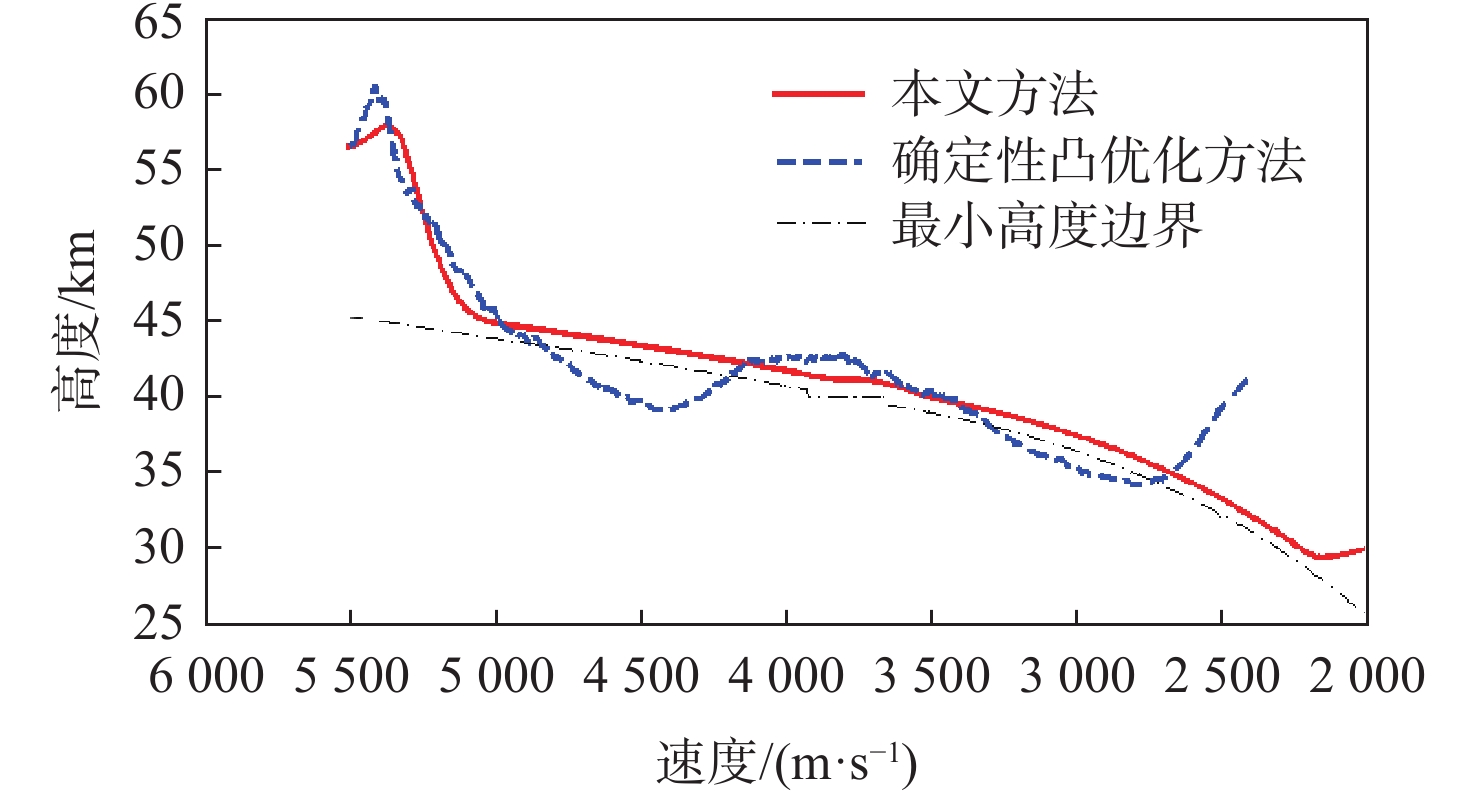
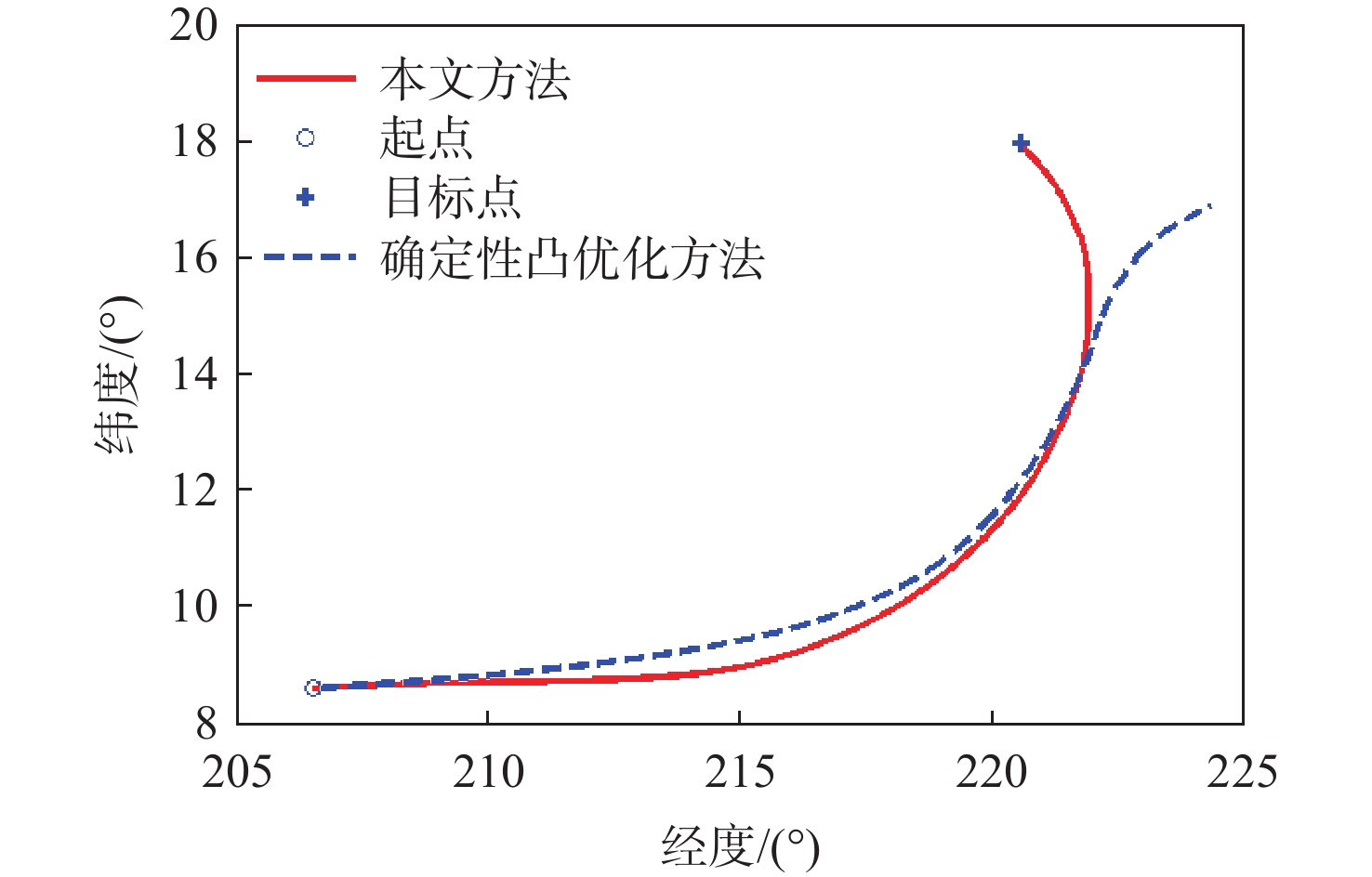
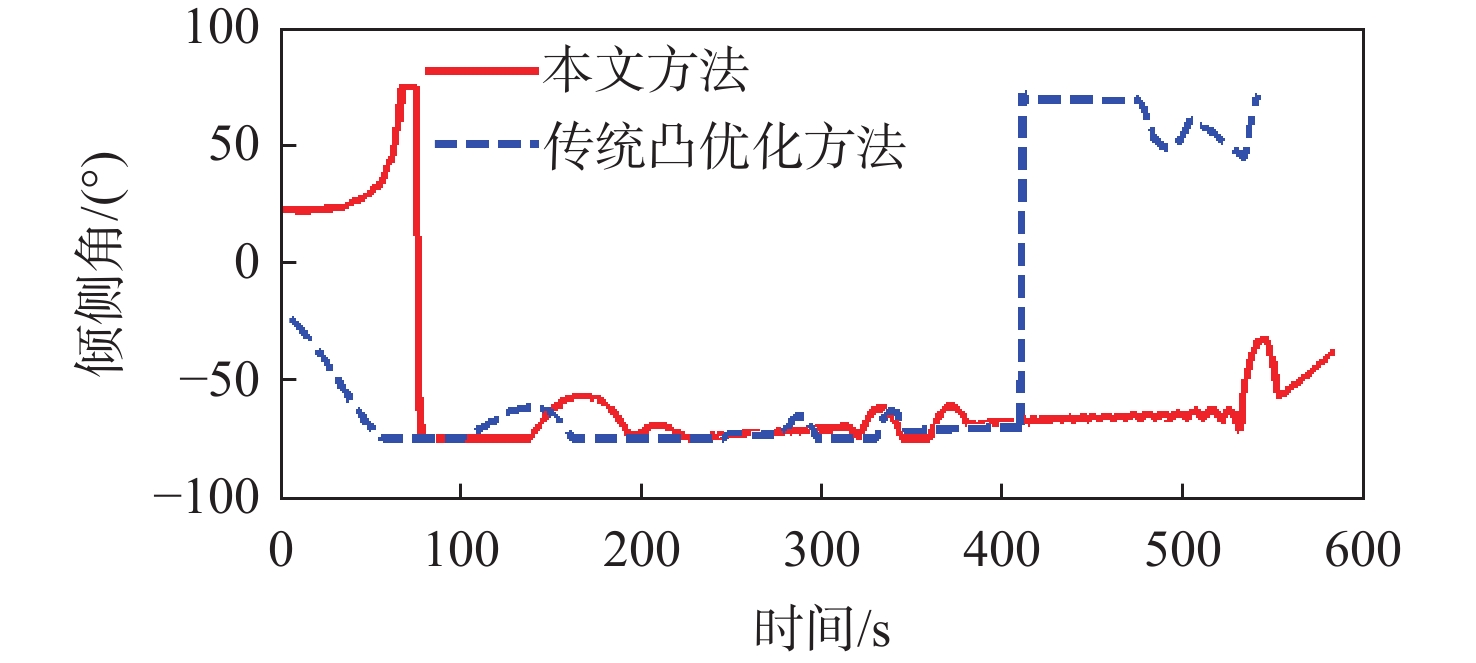
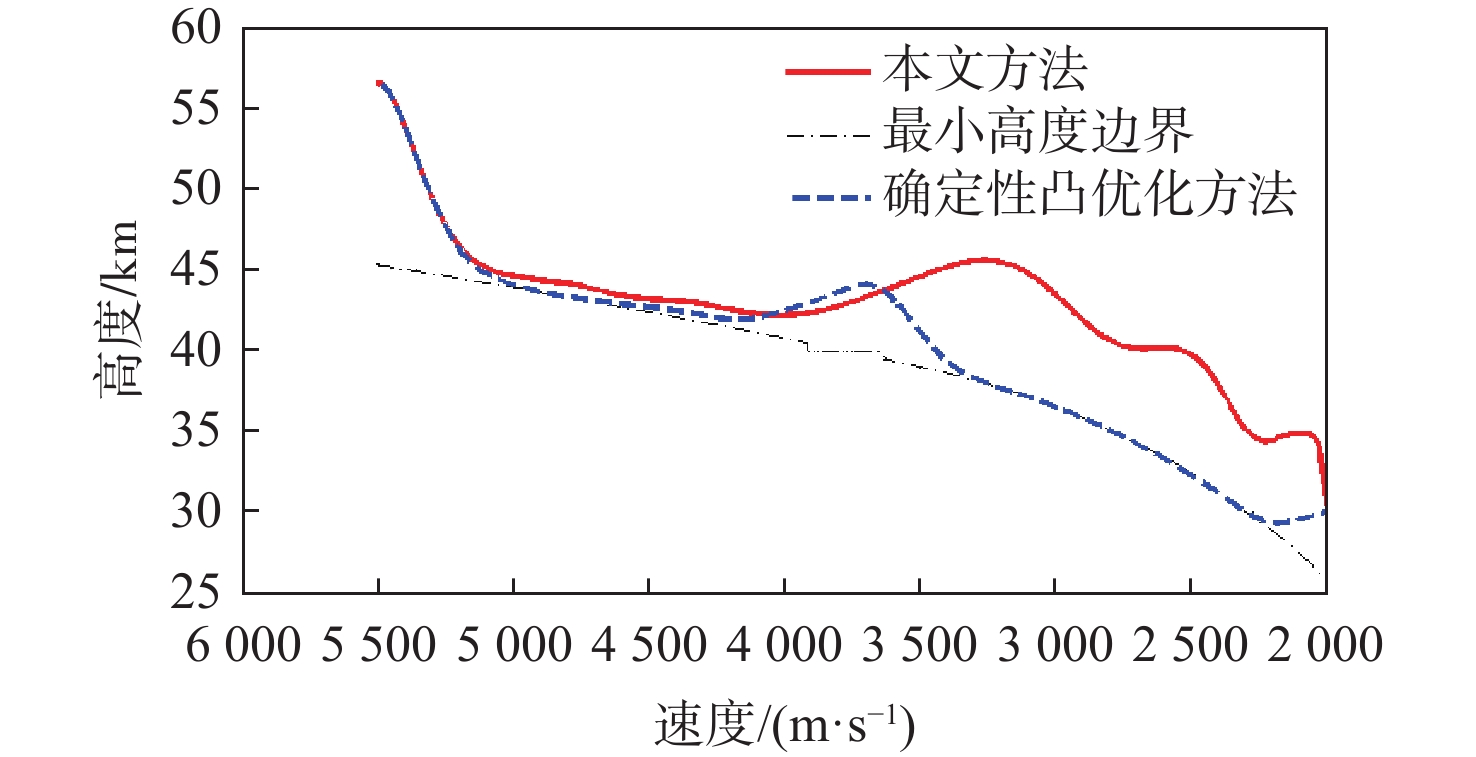
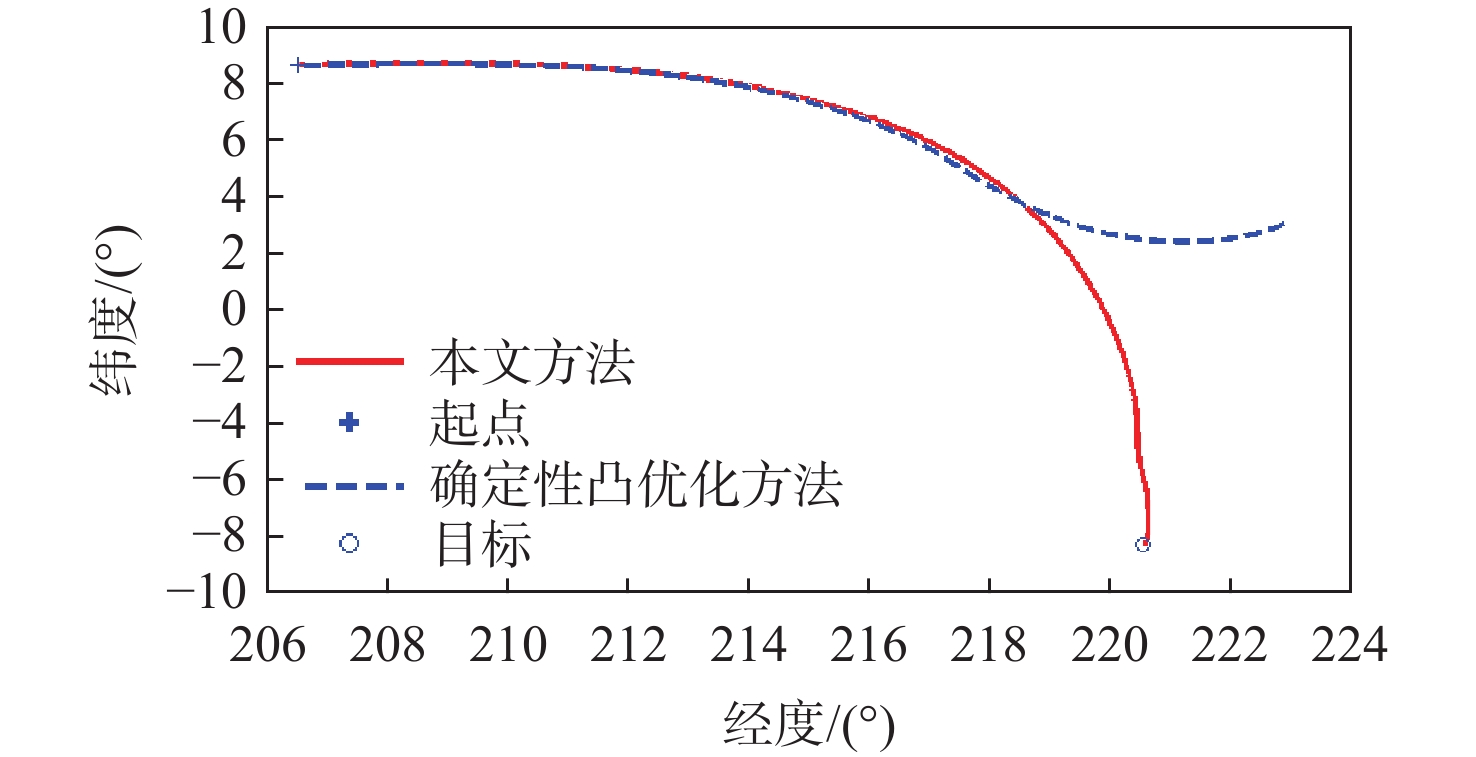
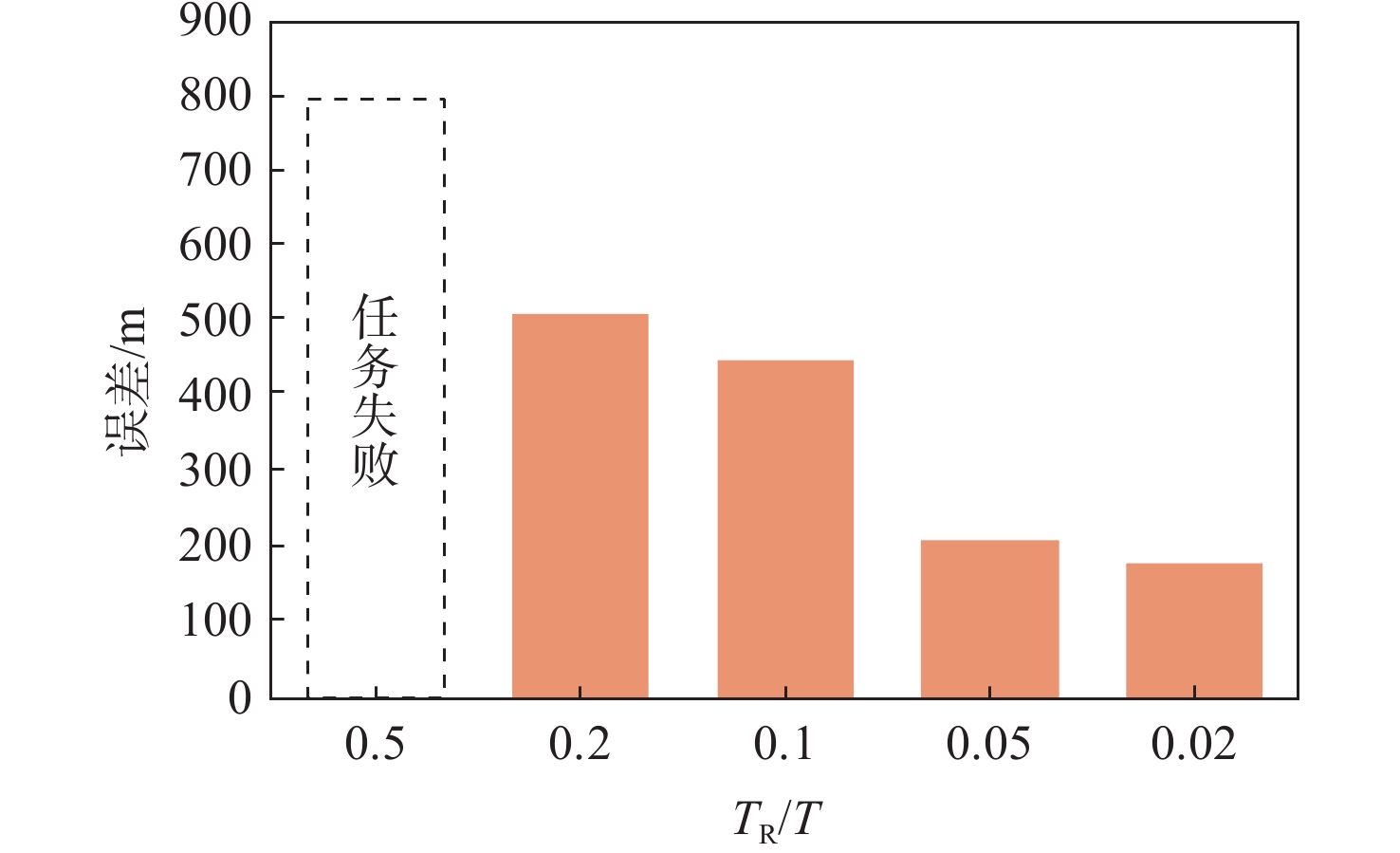
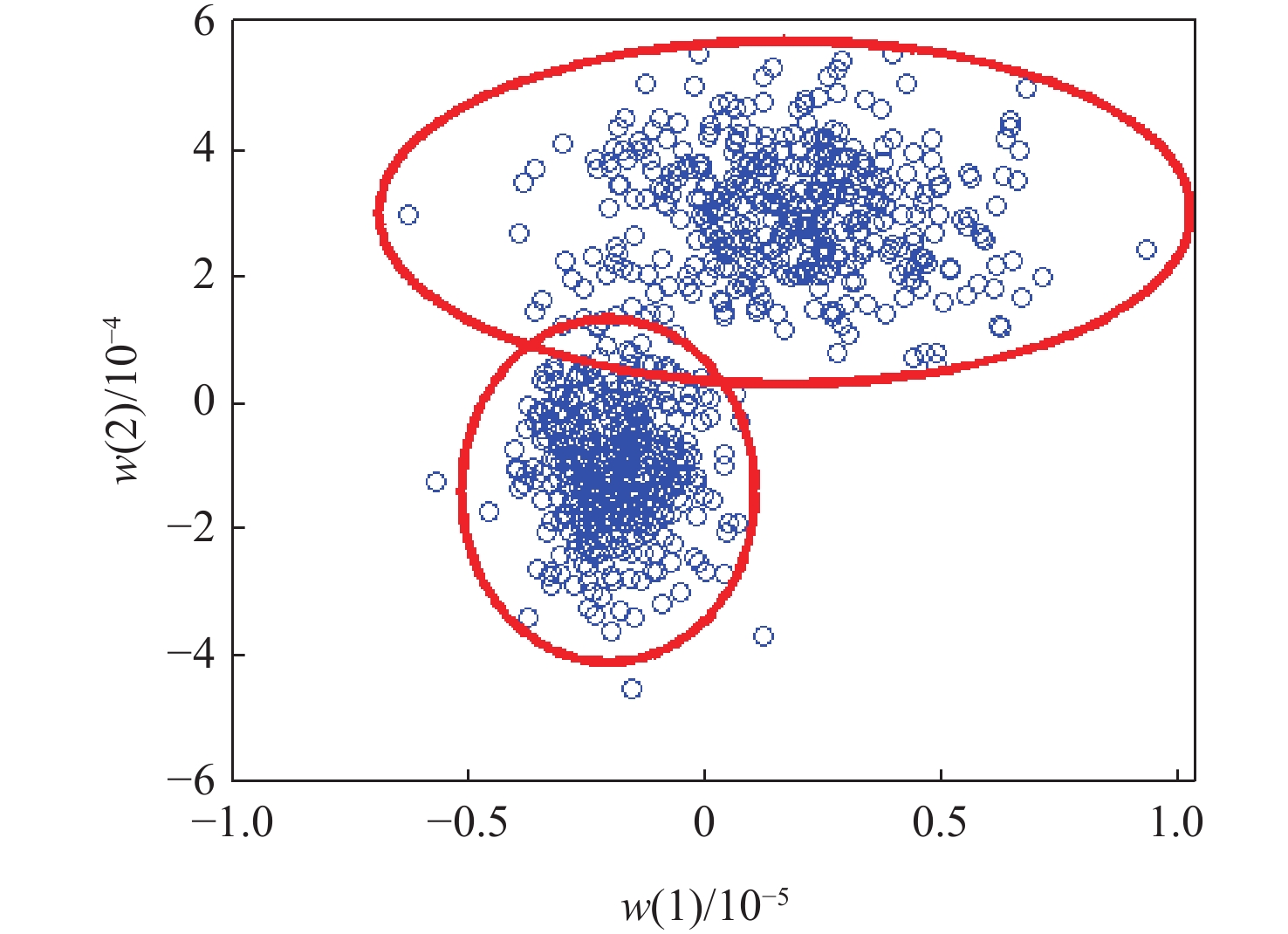
The flight process of reentry vehicles requires traversing a vast area from the near space to the ground. During this process, even minor modeling errors and external disturbances can lead to deviations from the original target point or exceed the constraint boundaries. To enhance the robustness of the results, this paper investigates a trajectory planning method for reentry vehicles under uncertain environments and introduces the concept of data-driven robust optimization to address uncertainties. A data-driven robust optimization trajectory planning approach is proposed. The core idea of the proposed method is to dynamically construct uncertainty sets using historical data of uncertain parameters and then solve the problem incorporating these sets using robust optimization techniques. Compared to traditional robust optimization or chance-constrained optimization, the proposed method offers two significant advantages: First, it does not require prior knowledge about the distribution or range of uncertain parameters, nor does it demand that they conform to a specific form. Second, by constructing data-driven support vector clusters online, the optimization results are less conservative. To improve computational efficiency, the method is further tailored according to the characteristics of reentry optimization problems. Numerical simulation results are presented and compared with traditional methods to demonstrate the effectiveness of the proposed approach.

| [1] |
SMITH K M. Predictive lateral logic for numerical entry guidance algorithms[C]//Proceedings of the AAS/AIAA Space Flight Mechanics Meeting. Reston: AIAA, 2016: 1-6.
|
| [2] |
MAO Y F, ZHANG D L, WANG L. Reentry trajectory optimization for hypersonic vehicle based on improved Gauss pseudospectral method[J]. Soft Computing, 2017, 21(16): 4583-4592. doi: 10.1007/s00500-016-2201-3
|
| [3] |
LIU X. Autonomous trajectory planning by convex optimization[D]. Ames : Iowa State University, 2013.
|
| [4] |
CHAI R Q, TSOURDOS A, SAVVARIS A, et al. Real-time reentry trajectory planning of hypersonic vehicles: A two-step strategy incorporating fuzzy multiobjective transcription and deep neural network[J]. IEEE Transactions on Industrial Electronics, 2020, 67(8): 6904-6915. doi: 10.1109/TIE.2019.2939934
|
| [5] |
CHAI R Q, SAVVARIS A, TSOURDOS A, et al. Stochastic spacecraft trajectory optimization with the consideration of chance constraints[J]. IEEE Transactions on Control Systems Technology, 2020, 28(4): 1550-1559. doi: 10.1109/TCST.2019.2908938
|
| [6] |
CASALINO L, MASSENI F, PASTRONE D. Deterministic and robust optimization of hybrid rocket engines for small satellite launchers[J]. Journal of Spacecraft and Rockets, 2021, 58(6): 1893-1903. doi: 10.2514/1.A35007
|
| [7] |
刘旭, 李响, 张后军, 等. 不确定条件下采用协方差描述函数法的再入轨迹鲁棒优化[J]. 宇航学报, 2021, 42(11): 1404-1415.
LIU X, LI X, ZHANG H J, et al. Robust reentry trajectory optimization under uncertainties using covariance analysis describing function technique[J]. Journal of Astronautics, 2021, 42(11): 1404-1415 (in Chinese).
|
| [8] |
HUANG Y C, LI H Y. Reliability-based trajectory optimization using nonintrusive polynomial chaos for Mars entry mission[J]. Advances in Space Research, 2018, 61(11): 2854-2869. doi: 10.1016/j.asr.2018.03.009
|
| [9] |
HUANG Y C, LI H Y, DU X, et al. Mars entry trajectory robust optimization based on evidence under epistemic uncertainty[J]. Acta Astronautica, 2019, 163: 225-237.
|
| [10] |
BLACKMORE L, ONO M, WILLIAMS B C. Chance-constrained optimal path planning with obstacles[J]. IEEE Transactions on Robotics, 2011, 27(6): 1080-1094. doi: 10.1109/TRO.2011.2161160
|
| [11] |
FARINA M, GIULIONI L, SCATTOLINI R. Stochastic linear model predictive control with chance constraints—A review[J]. Journal of Process Control, 2016, 44: 53-67. doi: 10.1016/j.jprocont.2016.03.005
|
| [12] |
PAULSON J A, BUEHLER E A, BRAATZ R D, et al. Stochastic model predictive control with joint chance constraints[J]. International Journal of Control, 2020, 93(1): 126-139. doi: 10.1080/00207179.2017.1323351
|
| [13] |
SHANG C, YOU F Q. A data-driven robust optimization approach to scenario-based stochastic model predictive control[J]. Journal of Process Control, 2019, 75: 24-39. doi: 10.1016/j.jprocont.2018.12.013
|
| [14] |
ZHANG X J, MARGELLOS K, GOULART P, et al. Stochastic model predictive control using a combination of randomized and robust optimization[C]//Proceedings of the 52nd IEEE Conference on Decision and Control. Piscataway: IEEE Press, 2013: 7740-7745.
|
| [15] |
KRISHNAMOORTHY D, SUWARTADI E, FOSS B, et al. Improving scenario decomposition for multistage MPC using a sensitivity-based path-following algorithm[J]. IEEE Control Systems Letters, 2018, 2(4): 581-586. doi: 10.1109/LCSYS.2018.2845108
|
| [16] |
YOU K Y, TEMPO R, XIE P. Distributed algorithms for robust convex optimization via the scenario approach[J]. IEEE Transactions on Automatic Control, 2019, 64(3): 880-895. doi: 10.1109/TAC.2018.2828093
|
| [17] |
SHANG C, HUANG X L, YOU F Q. Data-driven robust optimization based on kernel learning[J]. Computers & Chemical Engineering, 2017, 106: 464-479.
|
| [18] |
BEN-HUR A, HORN D, SIEGELMANN H T, et al. Support vector clustering[J]. Journal of Machine Learning Research, 2001, 2: 125-137.
|
| [19] |
HONG L J, HUANG Z Y, LAM H. Approximating data-driven joint chance-constrained programs via uncertainty set construction[C]//Proceedings of the Winter Simulation Conference. Piscataway: IEEE Press, 2016: 389-400.
|
| [20] |
TEMPO R, CALAFIORE G, DABBENE F. Randomized algorithms for analysis and control of uncertain systems: With applications[M]. London: Springer London, 2013.
|
| [21] |
LIU X F, SHEN Z J, LU P. Entry trajectory optimization by second-order cone programming[J]. Journal of Guidance Control Dynamics, 2016, 39(2): 227-241. doi: 10.2514/1.G001210
|
| [22] |
SHANG C, CHEN W H, STROOCK A D, et al. Robust model predictive control of irrigation systems with active uncertainty learning and data analytics[J]. IEEE Transactions on Control Systems Technology, 2020, 28(4): 1493-1504. doi: 10.1109/TCST.2019.2916753
|
| [23] |
PHILLIPS T H. A common aero vehicle (CAV) model, description, and employment guide[J]. Schafer Corporation for AFRL and AFSPC, 2003: 27-28.
|
Figures(8) / Tables(4)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: