| Citation: | CHEN H T,SU Z K,LI C T,et al. Trajectory design for straight-circulating flight transition of aerial recovery towing system[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(8):2565-2574 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0692

|
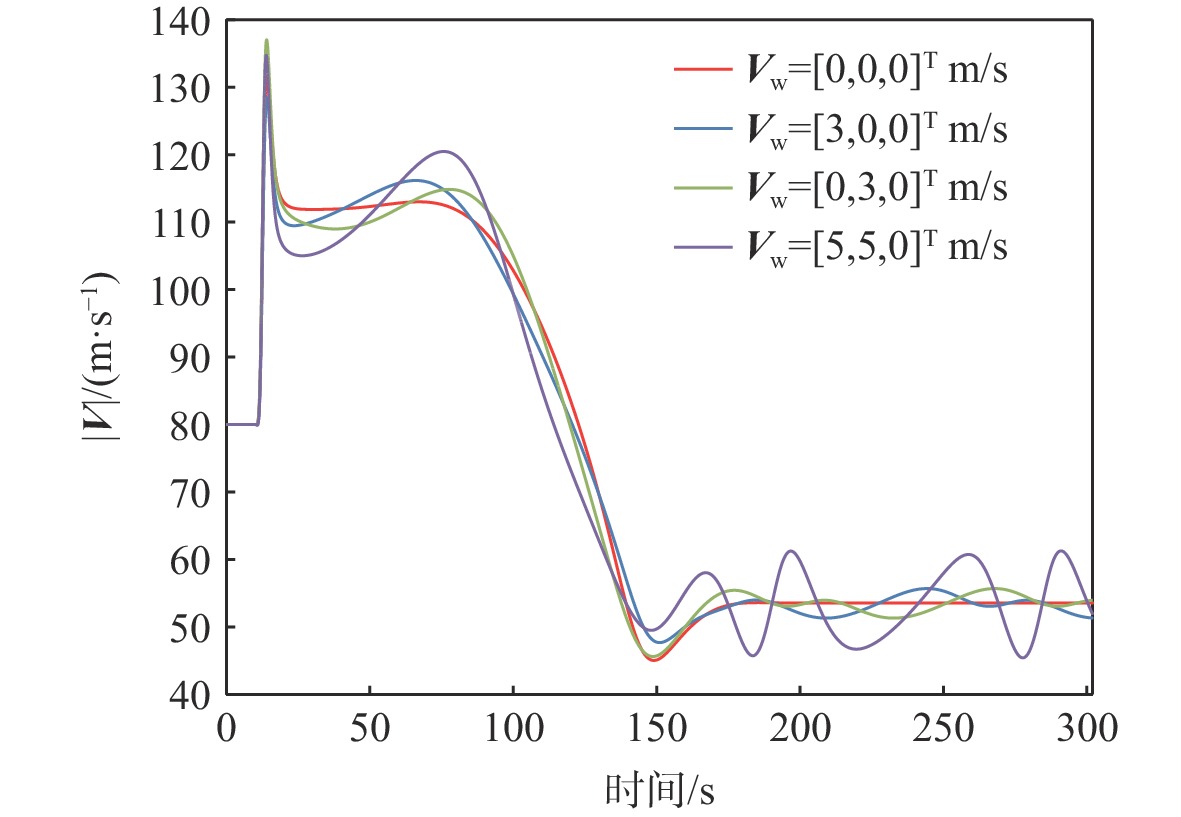
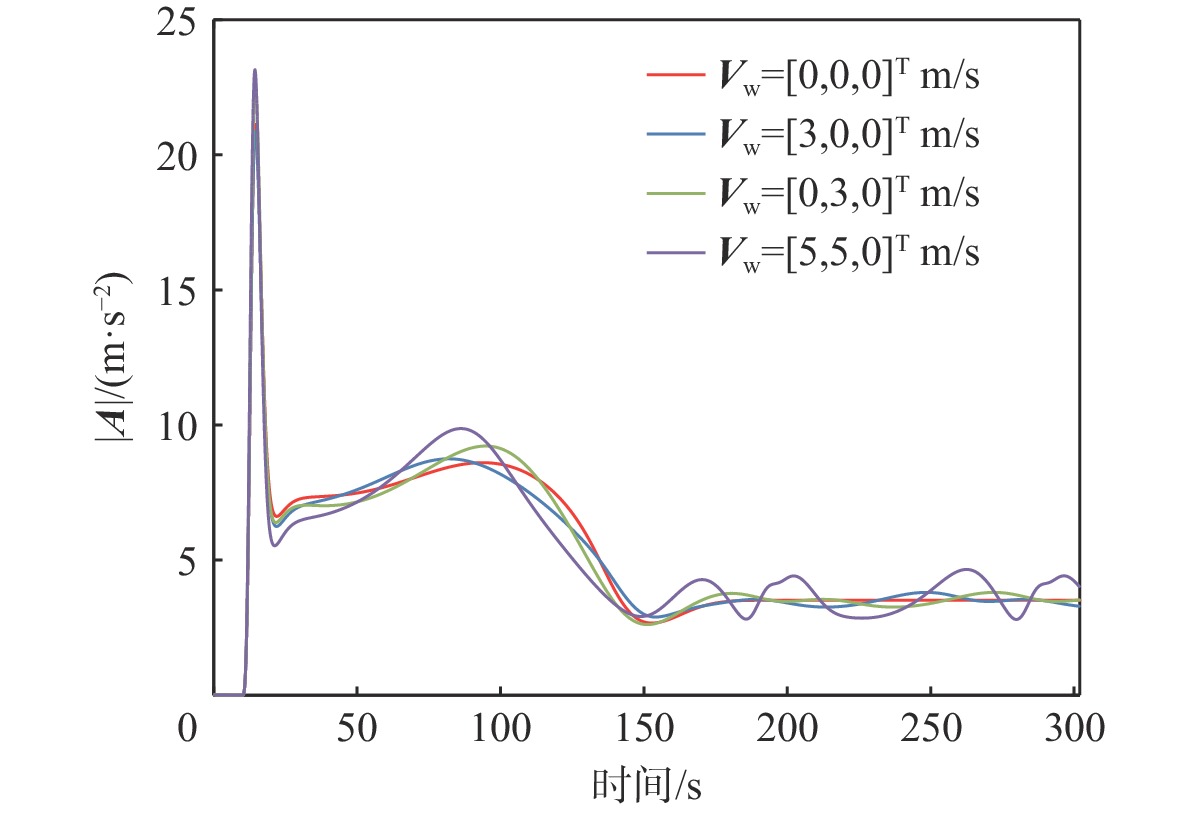
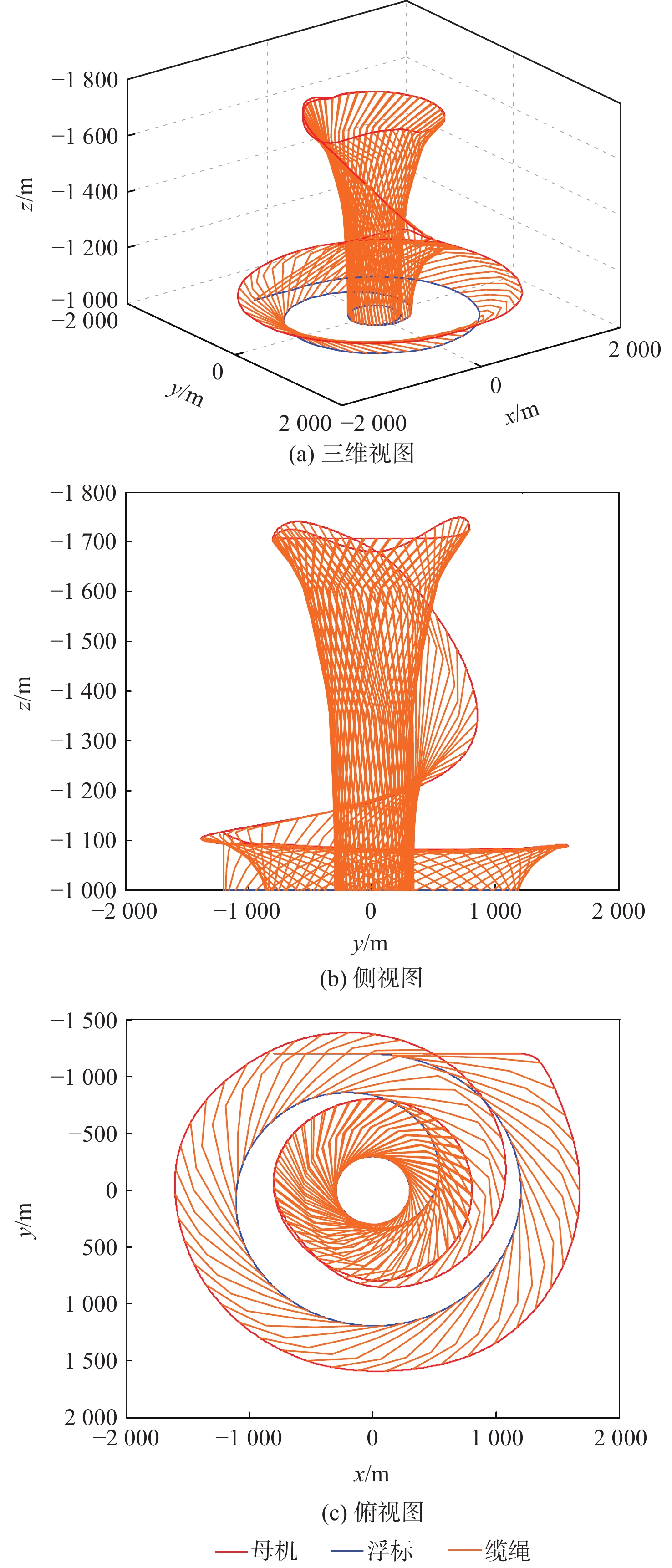
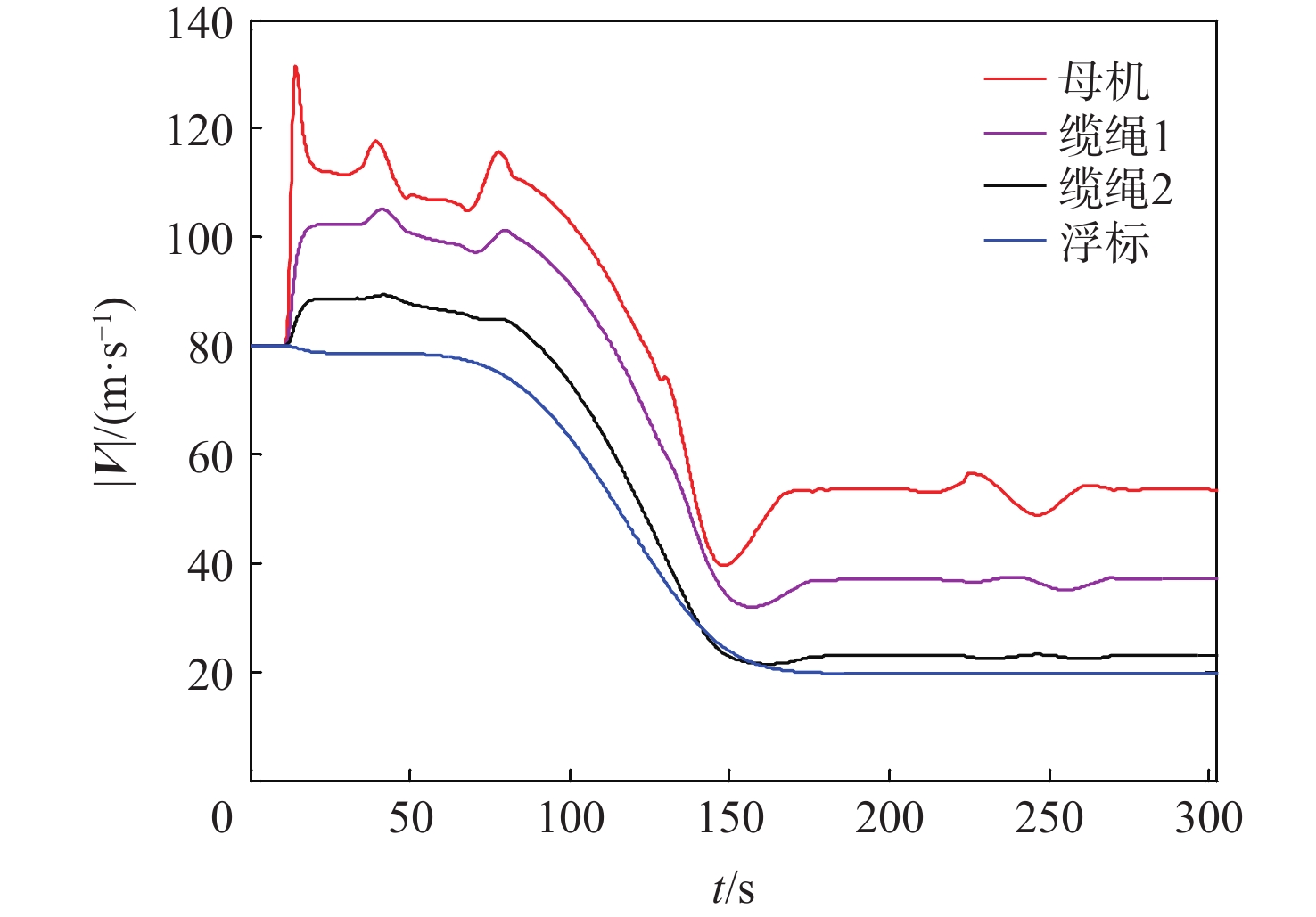
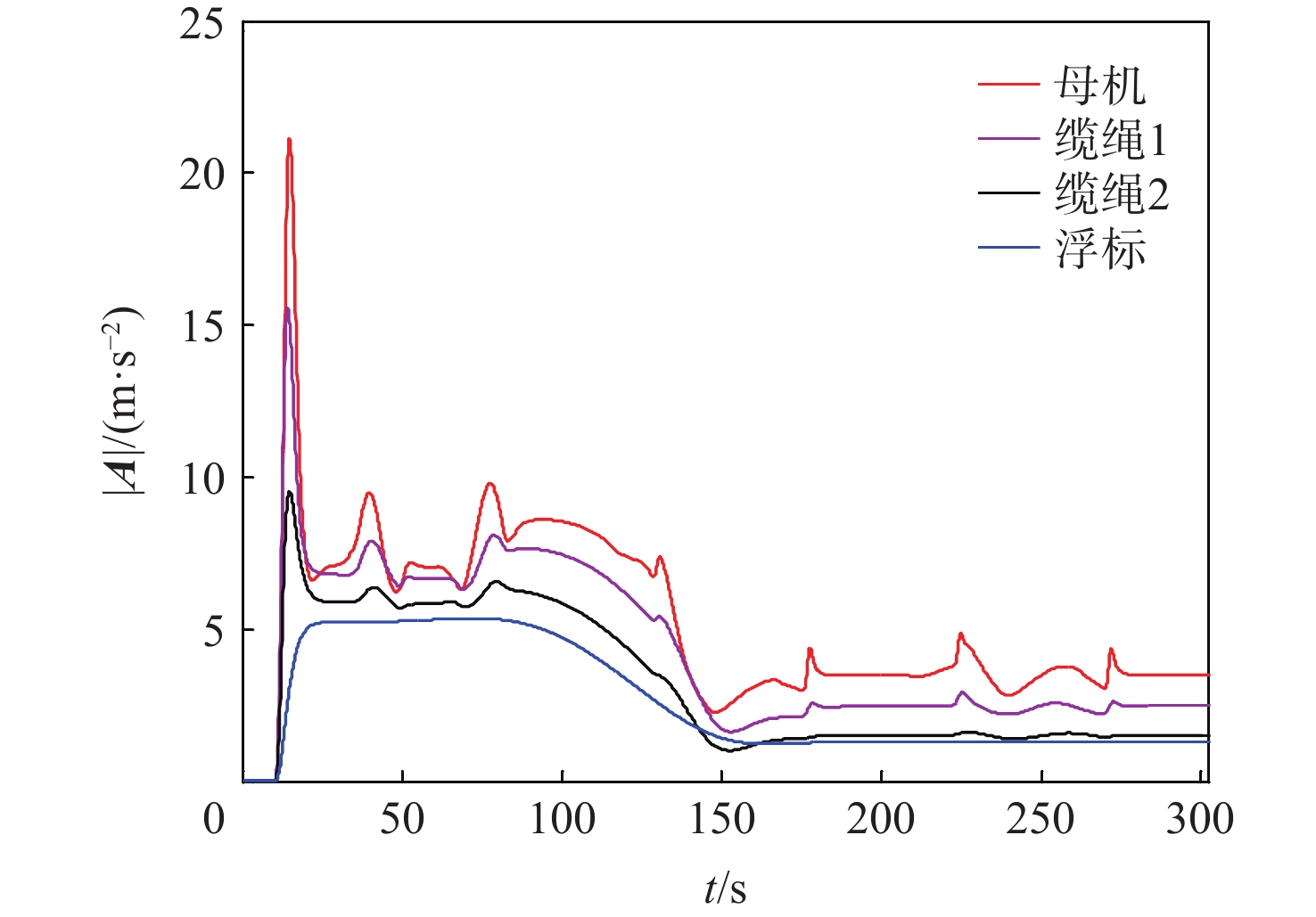
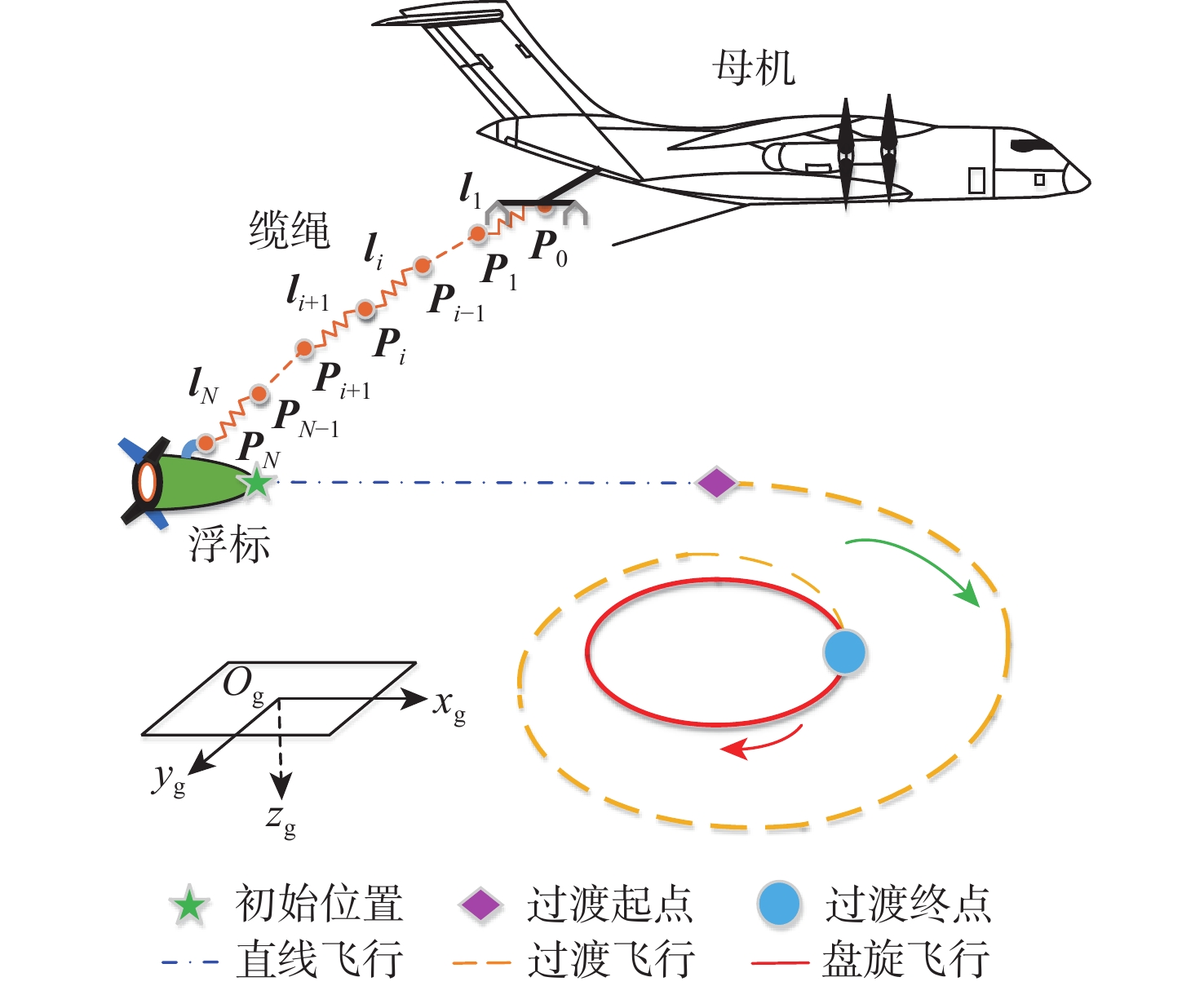
To handle the stabilization problem of the towed buoy in the straight-circulating flight transition process of the aerial recovery towing system under airflow disturbances, a trajectory design method for the transition process of the towing system based on differential flatness theory was proposed. By designing the trajectory of the mothership, the towed buoy was indirectly controlled to fly safely, smoothly, and accurately along the preset transition trajectory. Firstly, the mass-spring discrete cable model was used to construct the multi-body dynamic model of the mothership-cable-buoy. Secondly, after proving that the towing system was differentially flat, a trajectory design method of the towing system based on differential flatness theory was proposed by taking the three-axis position of the towed buoy as the flat output so that the buoy could fly along the preset safe transition trajectory. Subsequently, the straight and circulating flight states of the towed buoy were analyzed to design the flight trajectory of the towed buoy in the transition section. Finally, the simulation examples under a calm atmosphere, various constant wind, and gust turbulence scenarios show that the proposed method can achieve stable flight of the towed buoy in the straight-circulating transition section.

| [1] |
刘永孛. 集群无人机空基回收任务规划方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2021: 3-11.
LIU Y B. Research on mission planning methods for aerial recovery of unmanned aerial vehicle swarms[D]. Harbin: Harbin Institute of Technology, 2021: 3-11(in Chinese).
|
| [2] |
曹莉, 耿斌斌, 周亮, 等. 无人机集群发射与回收技术发展研究[J]. 空天防御, 2019, 2(2): 68-72.
CAO L, GENG B B, ZHOU L, et al. Research on UAVS launch and recovery technology development[J]. Air & Space Defense, 2019, 2(2): 68-72(in Chinese).
|
| [3] |
SUN L, CASTAGNO J D, HEDENGREN J D, et al. Parameter estimation for towed cable systems using moving horizon estimation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(2): 1432-1446. doi: 10.1109/TAES.2014.130642
|
| [4] |
WILLIAMS P, TRIVAILO P. Dynamics of circularly towed aerial cable systems, Part 2: Transitional flight and deployment control[J]. Journal of Guidance, Control, and Dynamics, 2007, 30(3): 766-779. doi: 10.2514/1.20434
|
| [5] |
苏子康, 李春涛, 余跃, 等. 绳系拖曳飞行器高抗扰轨迹跟踪控制[J]. 北京航空航天大学学报, 2021, 47(11): 2234-2248.
SU Z K, LI C T, YU Y, et al. High anti-disturbance trajectory tracking control for cable towed vehicle[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(11): 2234-2248(in Chinese).
|
| [6] |
MERZ M, JOHANSEN T A. Control of an end body towed by a circling unmanned aerial vehicle[J]. Journal of Guidance, Control, and Dynamics, 2019, 42(12): 2677-2686. doi: 10.2514/1.G004199
|
| [7] |
RO K, KUK T, KAMMAN J W. Dynamics and control of hose-drogue refueling systems during coupling[J]. Journal of Guidance, Control, and Dynamics, 2011, 34(6): 1694-1708. doi: 10.2514/1.53205
|
| [8] |
方晓星, 王勇, 王英勋. 低空掠海飞行拖靶自抗扰高度控制律设计[J]. 南京理工大学学报, 2012, 36(5): 835-839.
FANG X X, WANG Y, WANG Y X. Design of active disturbances rejection control law of low altitude sea-skimming tow target[J]. Journal of Nanjing University of Science and Technology, 2012, 36(5): 835-839(in Chinese).
|
| [9] |
SU Z K, LI C T, WU J F, et al. Neuro-adaptive prescribed performance control for aerial-recovery drogue with actuator constraints[J]. Journal of Guidance, Control, and Dynamics, 2022, 45(8): 1451-1465. doi: 10.2514/1.G005679
|
| [10] |
WILLIAMS P. Optimization of circularly towed cable system in crosswind[J]. Journal of Guidance, Control, and Dynamics, 2010, 33(4): 1251-1263. doi: 10.2514/1.45241
|
| [11] |
SUN L, HEDENGREN J D, BEARD R W. Optimal trajectory generation using model predictive control for aerially towed cable systems[J]. Journal of Guidance, Control, Dynamics, 2014, 37(2): 525-539. doi: 10.2514/1.60820
|
| [12] |
MURRAY R M. Trajectory generation for a towed cable system using differential flatness[J]. IFAC Proceedings Volumes, 1996, 29(1): 2792-2797. doi: 10.1016/S1474-6670(17)58099-4
|
| [13] |
WILLIAMS P, LAPTHORNE P, TRIVAILO P. Circularly-towed lumped mass cable model validation from experimental data[C]// Proceedings of the AIAA Modeling and Simulation Technologies Conference and Exhibit. Reston: AIAA, 2006.
|
| [14] |
WILLIAMS P, SGARIOTO D, TRIVAILO P. Motion planning for an aerial-towed cable system[C]//Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit. Reston: AIAA, 2005.
|
| [15] |
WILLIAMS P, TRIVAILO P. Dynamics of circularly towed aerial cable systems, Part I: Optimal configurations and their stability[J]. Journal of Guidance, Control, and Dynamics, 2007, 30(3): 753-765. doi: 10.2514/1.20433
|
| [16] |
周孝添, 任宏斌, 苏波, 等. 基于微分平坦的分层轨迹规划算法[J]. 兵工学报, 2023, 44(2): 394-405.
ZHOU X T, REN H B, SU B, et al. Hierarchical trajectory planning algorithm based on differential flatness[J]. Acta Armanmentarii, 2023, 44(2): 394-405(in Chinese).
|
| [17] |
丛岩峰, 安向京, 陈虹, 等. 基于滚动优化原理的类车机器人路径跟踪控制[J]. 吉林大学学报(工学版), 2012, 42(1): 182-187.
CONG Y F, AN X J, CHEN H, et al. Path following control of car-like robot based on rolling windows[J]. Journal of Jilin University(Engineering and Technology Edition), 2012, 42(1): 182-187(in Chinese).
|
| [18] |
CHAMSEDDINE A, ZHANG Y M, RABBATH C A, et al. Flatness-based trajectory planning/replanning for a quadrotor unmanned aerial vehicle[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(4): 2832-2848. doi: 10.1109/TAES.2012.6324664
|
| [19] |
ZHAO D, MISHRA S, GANDHI F. A differential-flatness-based approach for autonomous helicopter shipboard landing[J]. IEEE/ASME Transactions on Mechatronics, 2022, 27(3): 1557-1569. doi: 10.1109/TMECH.2021.3085696
|
| [20] |
WILLIAMS P, SGARIOTO D, TRIVAILO P M. Constrained path-planning for an aerial-towed cable system[J]. Aerospace Science and Technology, 2008, 12(5): 347-354. doi: 10.1016/j.ast.2007.08.006
|
| [21] |
朱延娟, 罗丹. 飞机圆周盘旋时托缆的动力学建模与分析[J]. 同济大学学报(自然科学版), 2018, 46(1): 81-86.
ZHU Y J, LUO D. Dynamics modeling and simulation of circularly aerial towed cable systems[J]. Journal of Tongji University (Natural Science), 2018, 46(1): 81-86(in Chinese).
|
| [22] |
肖业伦, 金长江. 大气扰动中的飞行原理[M]. 北京: 国防工业出版社, 1993: 27-48.
XIAO Y L, JIN C J. Flight principle in atmospheric disturbance [M]. Beijing: National Defense Industry Press, 1993: 27-48(in Chinese).
|
Figures(14) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: