| Citation: | MENG Z P,YANG L Q,WANG B,et al. ADRC design for folding wing vehicles based on improved equilibrium optimization algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(8):2449-2460 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0698

|
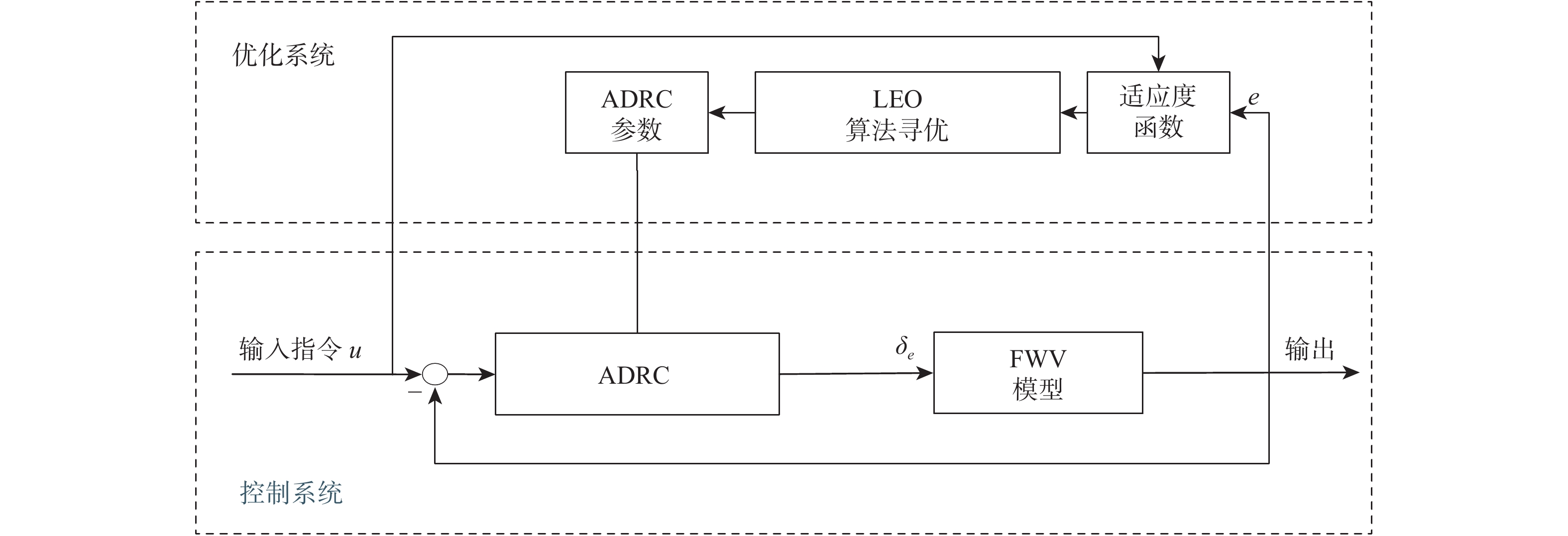
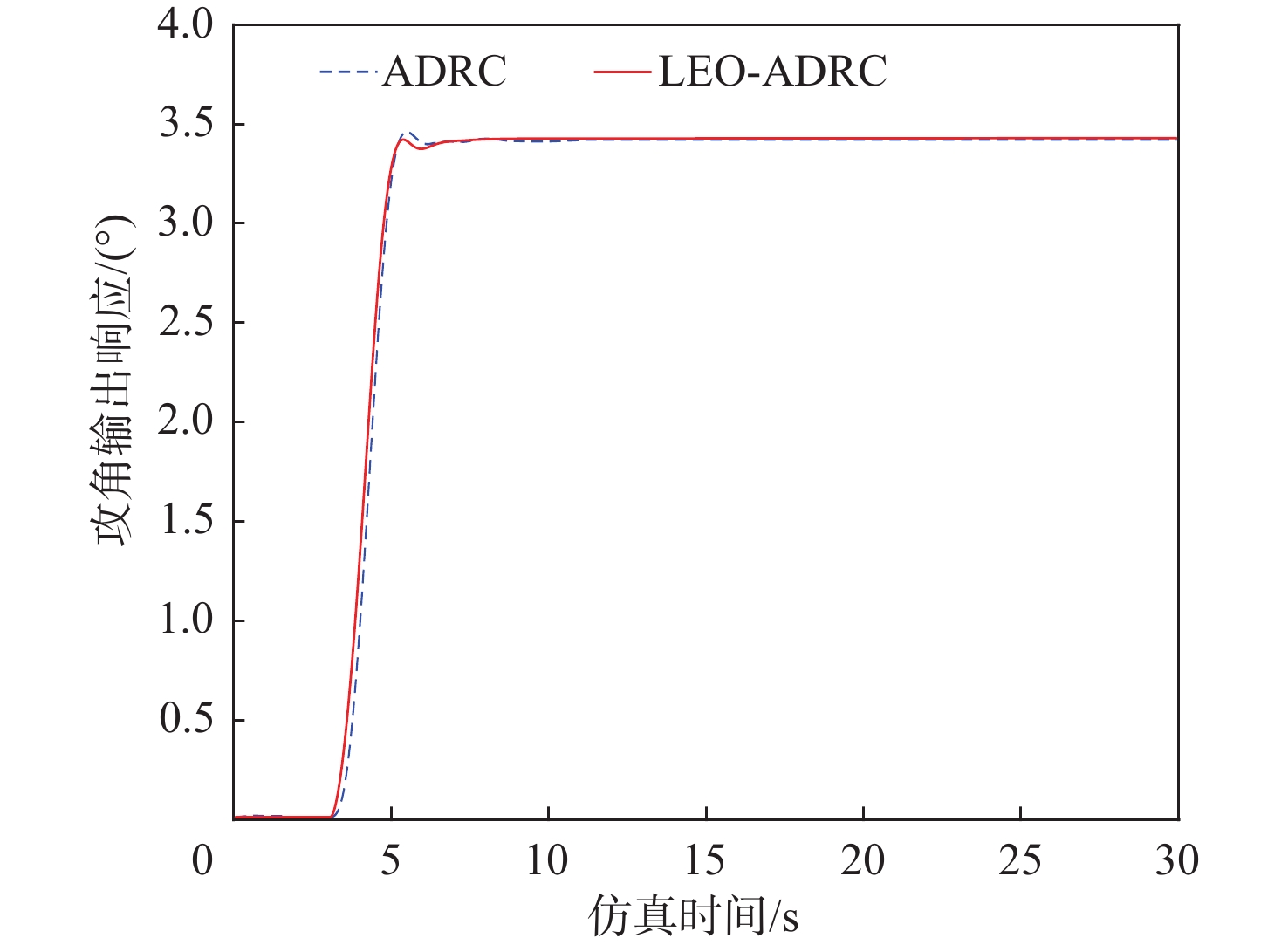
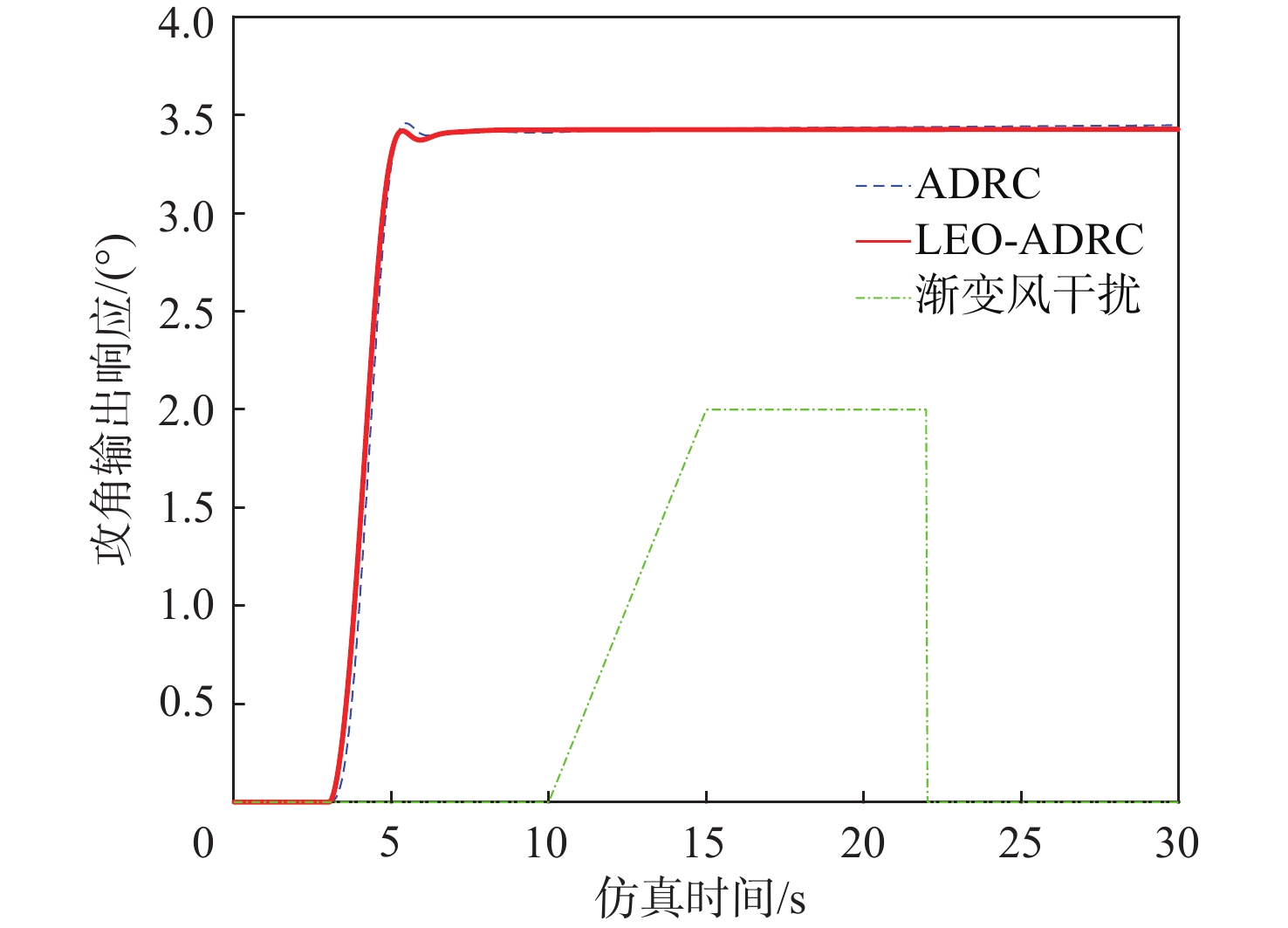
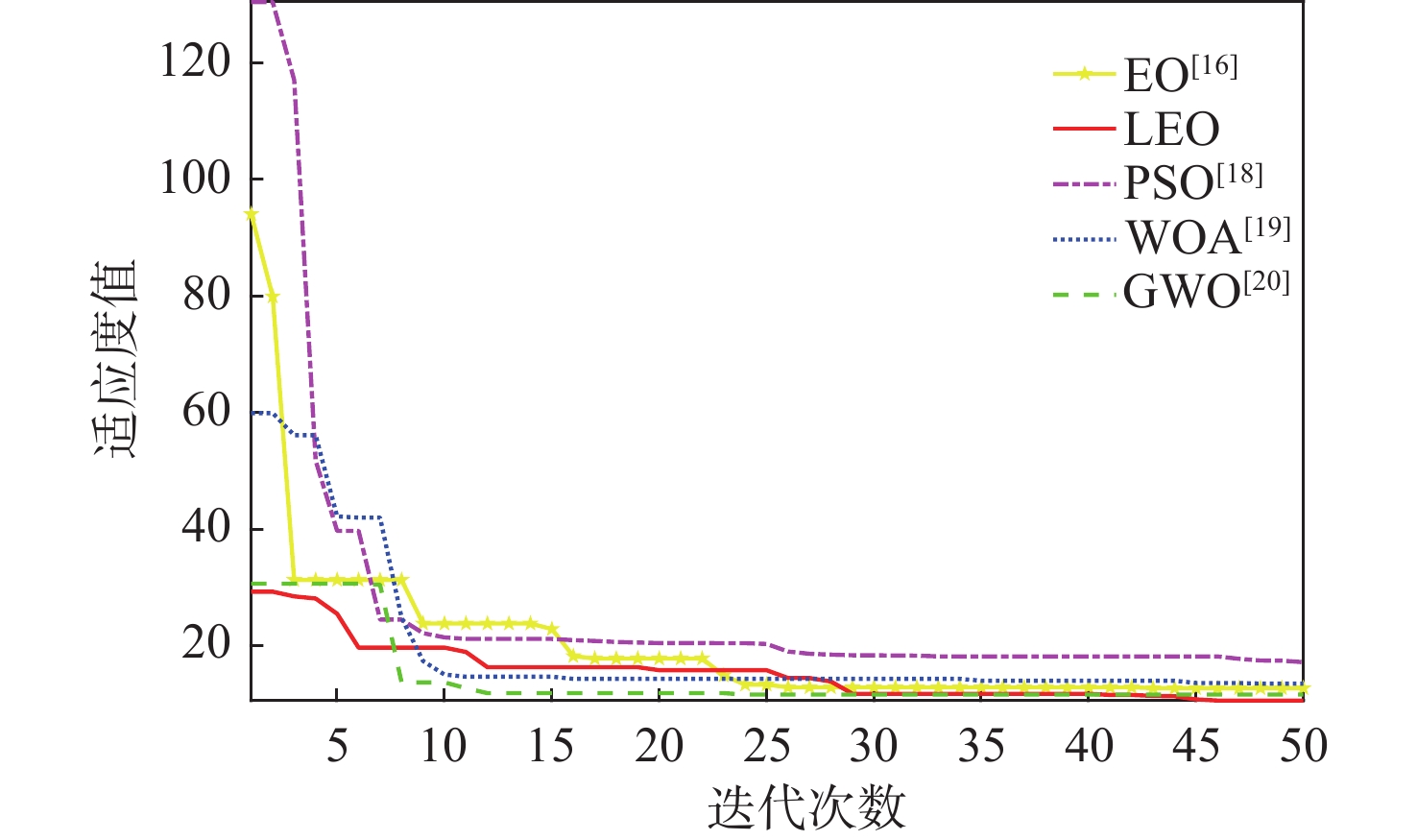
In view of the modeling errors and poor anti-disturbance ability of folding wing vehicles (FWV) and the difficulty in manual parameter setting of active disturbance rejection controllers (ADRC), an optimization algorithm based on improved equilibrium optimizer based on Lévy(LEO)was proposed. A dynamics model of typical FWV was established, and an attitude controller for the FWV was designed based on the ADRC structure. The parameters of the ADRC were adjusted by the proposed algorithm, and a comparison between the optimized ADRC and the traditional ADRC by the simulation was made from the perspective of control performance and anti-disturbance. The proposed algorithm was compared with the classical equilibrium optimizer, particle swarm optimization (PSO) algorithm, and so on. The simulation results show that the controller optimized by the proposed algorithm can improve the control accuracy and disturbance suppression performance of FWV, and the superiority of the algorithm in the parameter optimization of ADRC was verified. The prototype equipped with the improved ADRC was verified in real flight. The results show that the FWV prototype still has a good flight performance index under wind disturbance, which further verifies that ADRC optimized by the proposed algorithm improves the anti-disturbance of FWV.

| [1] |
HAAS F, GORB S, WOOTTON R J. Elastic joints in dermapteran hind wings: Materials and wing folding[J]. Arthropod Structure & Development, 2000, 29(2): 137-146.
|
| [2] |
何肇雄, 郑震山, 马东立, 等. 国外跨介质飞行器发展历程及启示[J]. 舰船科学技术, 2016, 38(9): 152-157. doi: 10.3404/j.issn.1672-7619.2016.05.032
HE Z X, ZHENG Z S, MA D L, et al. Development of foreign trans-media aircraft and its enlightenment to China[J]. Ship Science and Technology, 2016, 38(9): 152-157 (in Chinese). doi: 10.3404/j.issn.1672-7619.2016.05.032
|
| [3] |
杨立本, 章卫国, 黄得刚. 基于ADRC姿态解耦的四旋翼飞行器鲁棒轨迹跟踪[J]. 北京航空航天大学学报, 2015, 41(6): 1026-1033.
YANG L B, ZHANG W G, HUANG D G. Robust trajectory tracking for quadrotor aircraft based on ADRC attitude decoupling control[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(6): 1026-1033 (in Chinese).
|
| [4] |
石嘉, 裴忠才, 唐志勇, 等. 改进型自抗扰四旋翼无人机控制系统设计与实现[J]. 北京航空航天大学学报, 2021, 47(9): 1823-1831.
SHI J, PEI Z C, TANG Z Y, et al. Design and realization of an improved active disturbance rejection quadrotor UAV control system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(9): 1823-1831 (in Chinese).
|
| [5] |
韩京清. 自抗扰控制技术: 估计补偿不确定因素的控制技术[M]. 北京: 国防工业出版社, 2008: 197-270.
HAN J Q. Active disturbance rejection control technique-the technique for estimating and compensating the uncertainties[M]. Beijing: National Defense Industry Press, 2008: 197-270 (in Chinese).
|
| [6] |
高志强. 自抗扰控制思想探究[J]. 控制理论与应用, 2013, 30(12): 1498-1510. doi: 10.7641/CTA.2013.31087
GAO Z Q. On the foundation of active disturbance rejection control[J]. Control Theory & Applications, 2013, 30(12): 1498-1510 (in Chinese). doi: 10.7641/CTA.2013.31087
|
| [7] |
韩京清. 从PID技术到“自抗扰控制” 技术[J]. 控制工程, 2002, 9(3): 13-18. doi: 10.3969/j.issn.1671-7848.2002.03.003
HAN J Q. From PID technique to active disturbances rejection control technique[J]. Basic Automation, 2002, 9(3): 13-18 (in Chinese). doi: 10.3969/j.issn.1671-7848.2002.03.003
|
| [8] |
王丽君, 李擎, 童朝南, 等. 时滞系统的自抗扰控制综述[J]. 控制理论与应用, 2013, 30(12): 1521-1533. doi: 10.7641/CTA.2013.31058
WANG L J, LI Q, TONG C N, et al. Overview of active disturbance rejection control for systems with time-delay[J]. Control Theory & Applications, 2013, 30(12): 1521-1533 (in Chinese). doi: 10.7641/CTA.2013.31058
|
| [9] |
李述清, 张胜修, 刘毅男, 等. 根据系统时间尺度整定自抗扰控制器参数[J]. 控制理论与应用, 2012, 29(1): 125-129.
LI S Q, ZHANG S X, LIU Y N, et al. Parameter-tuning in active disturbance rejection controller using time scale[J]. Control Theory & Applications, 2012, 29(1): 125-129 (in Chinese).
|
| [10] |
李杰, 齐晓慧, 夏元清, 等. 线性/非线性自抗扰切换控制方法研究[J]. 自动化学报, 2016, 42(2): 202-212.
LI J, QI X H, XIA Y Q, et al. On linear/nonlinear active disturbance rejection switching control[J]. Acta Automatica Sinica, 2016, 42(2): 202-212 (in Chinese).
|
| [11] |
LIANG S, RAJORA M, LIU X L, et al. Intelligent manufacturing systems: A review[J]. International Journal of Mechanical Engineering and Robotics Research, 2016, 7(2): 324-330. doi: 10.18178/ijmerr.7.3.324-330
|
| [12] |
LIU M, LIN R, YANG M, et al. Active disturbance rejection motion control of spherical robot with parameter tuning[J]. Industrial Robot, 2022, 49(2): 332-343. doi: 10.1108/IR-05-2021-0099
|
| [13] |
KANG C H, WANG S Q, REN W J, et al. Optimization design and application of active disturbance rejection controller based on intelligent algorithm[J]. IEEE Access, 2019, 7: 59862-59870. doi: 10.1109/ACCESS.2019.2909087
|
| [14] |
WOLPERT D H, MACREADY W G. No free lunch theorems for optimization[J]. IEEE Transactions on Evolutionary Computation, 1997, 1(1): 67-82. doi: 10.1109/4235.585893
|
| [15] |
KAMARUZAMAN A F, ZAIN A M, YUSUF S M, et al. Levy flight algorithm for optimization problems - a literature review[J]. Applied Mechanics and Materials, 2013, 421: 496-501. doi: 10.4028/www.scientific.net/AMM.421.496
|
| [16] |
李守玉, 何庆, 陈俊. 改进平衡优化器算法在约束优化问题中的应用[J/OL]. 计算机科学与探索, 2021: 1-14 [2022-07-09]. https://kns.cnki.net/kcms/detail/11.5602.TP.20210901.1435.002.html.
LI S Y, HE Q, CHEN J. Application of improved equilibrium optimizer algorithm to constrained optimization problems[J/OL]. Journal of Frontiers of Computer Science and Technology, 2021: 1-14 [2022-07-09]. https://kns.cnki.net/kcms/detail/11.5602.TP.20210901.1435.002.html (in Chinese).
|
| [17] |
杨柳庆, 杨婷婷, 王鹏飞, 等. 一种基于莱维飞行的新型改进平衡全局优化算法[J]. 宇航计测技术, 2020, 40(5): 62-69. doi: 10.12060/j.issn.1000-7202.2020.05.10
YANG L Q, YANG T T, WANG P F, et al. A new improved equilibrium global optimization algorithm based on Lévy flight[J]. Journal of Astronautic Metrology and Measurement, 2020, 40(5): 62-69 (in Chinese). doi: 10.12060/j.issn.1000-7202.2020.05.10
|
| [18] |
MARINI F, WALCZAK B. Particle swarm optimization (PSO): A tutorial[J]. Chemometrics and Intelligent Laboratory Systems, 2015, 149: 153-165.
|
| [19] |
MIRJALILI S, LEWIS A. The whale optimization algorithm[J]. Advances in Engineering Software, 2016, 95: 51-67.
|
| [20] |
SAREMI S, MIRJALILI S Z, MIRJALILI S M. Evolutionary population dynamics and grey wolf optimizer[J]. Neural Computing and Applications, 2015, 26(5): 1257-1263.
|
| [21] |
唐志勇, 马福源, 裴忠才. 四旋翼的改进PSO-RBF神经网络自适应滑模控制[J]. 北京航空航天大学学报, 2023, 49(7): 1563-1572.
TANG Z Y, MA F Y, PEI Z C. Improved PSO-RBF neural network adaptive sliding mode control for quadrotor systems[J]. Journal of Beijing University of Aeronautics and Astronautics, 2023, 49(7): 1563-1572 (in Chinese).
|
| [22] |
CHE J F, LI D H, JI Y H, et al. Attitude control for a quadrotor base on ADRC with GSO parameter optimization[C]//Proceedings of the Chinese Control and Decision Conference. Piscataway: IEEE Press, 2018: 1364-1369.
|
| [23] |
ALJARAH I, FARIS H, MIRJALILI S. Optimizing connection weights in neural networks using the whale optimization algorithm[J]. Soft Computing, 2018, 22(1): 1-15. doi: 10.1007/s00500-016-2442-1
|
| [24] |
费伦, 段海滨, 徐小斌, 等. 基于变权重变异鸽群优化的无人机空中加油自抗扰控制器设计[J]. 航空学报, 2020, 41(1): 323490.
FEI L, DUAN H B, XU X B, et al. ADRC controller design for UAV based on variable weighted mutant pigeon inspired optimization[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(1): 323490 (in Chinese).
|
| [25] |
杜作义, 马乐瑶. 基于Matlab/simulink的风速仿真研究[J]. 中国西部科技, 2013, 12(12): 46-47. doi: 10.3969/j.issn.1671-6396.2013.12.024
DU Z Y, MA L Y. Wind speed simulation based on matlab/simulink[J]. Science and Technology of West China, 2013, 12(12): 46-47 (in Chinese). doi: 10.3969/j.issn.1671-6396.2013.12.024
|
| [26] |
范培蕾, 张晓今, 杨涛. 高超声速飞行试验风场建模与仿真分析[J]. 战术导弹技术, 2009(2): 76-82. doi: 10.3969/j.issn.1009-1300.2009.02.018
FAN P L, ZHANG X J, YANG T. Analyses of high altitude wind model of hypersonic vehicle test[J]. Tactical Missile Technology March, 2009(2): 76-82(in Chinese). doi: 10.3969/j.issn.1009-1300.2009.02.018
|
Figures(22) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: