| Citation: | XU J M,HUANG Z G,LI R. LEO satellite positioning method and simulation verification aided by airborne navigation equipment[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(10):3230-3238 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0759

|
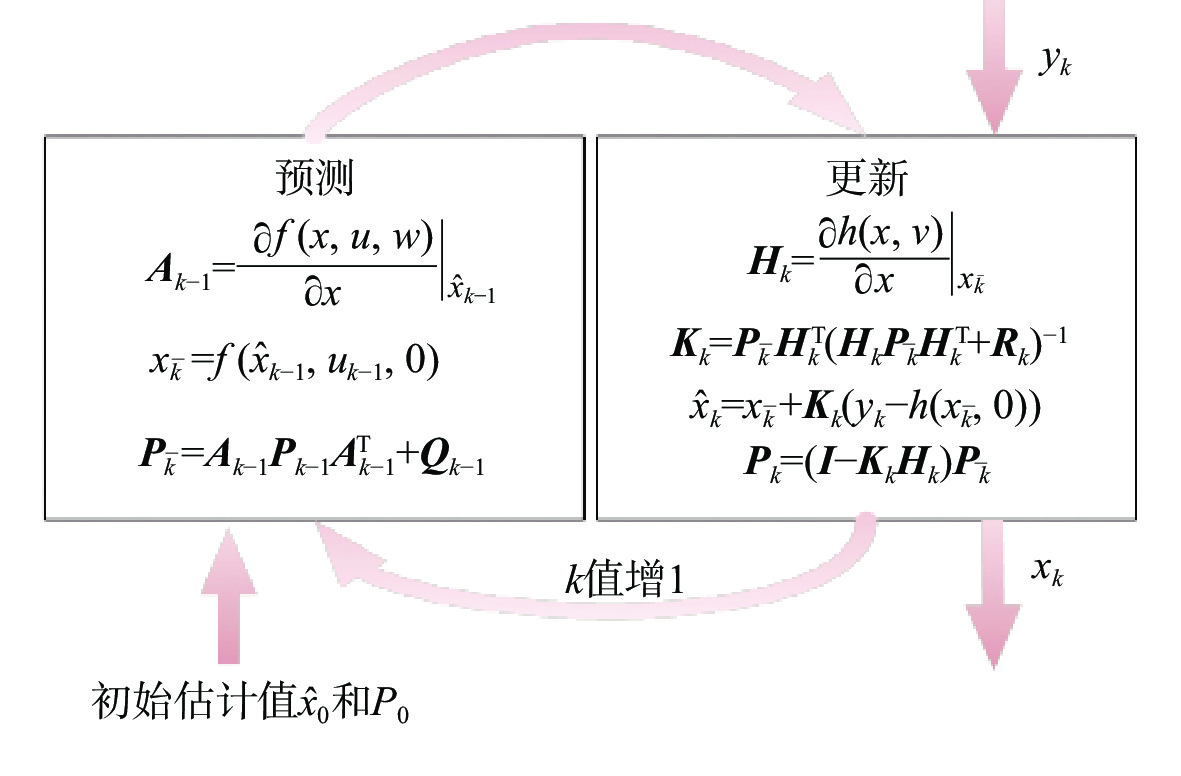
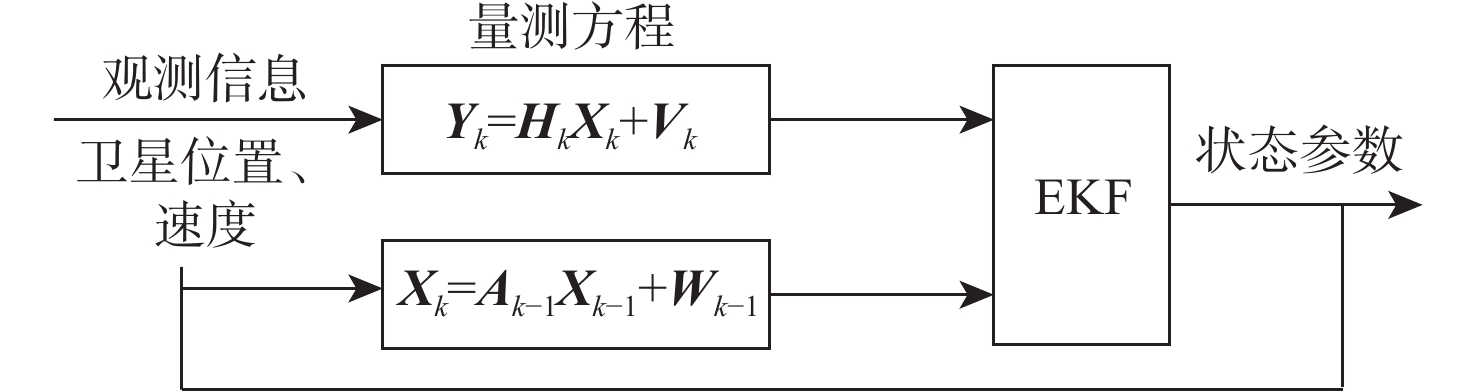
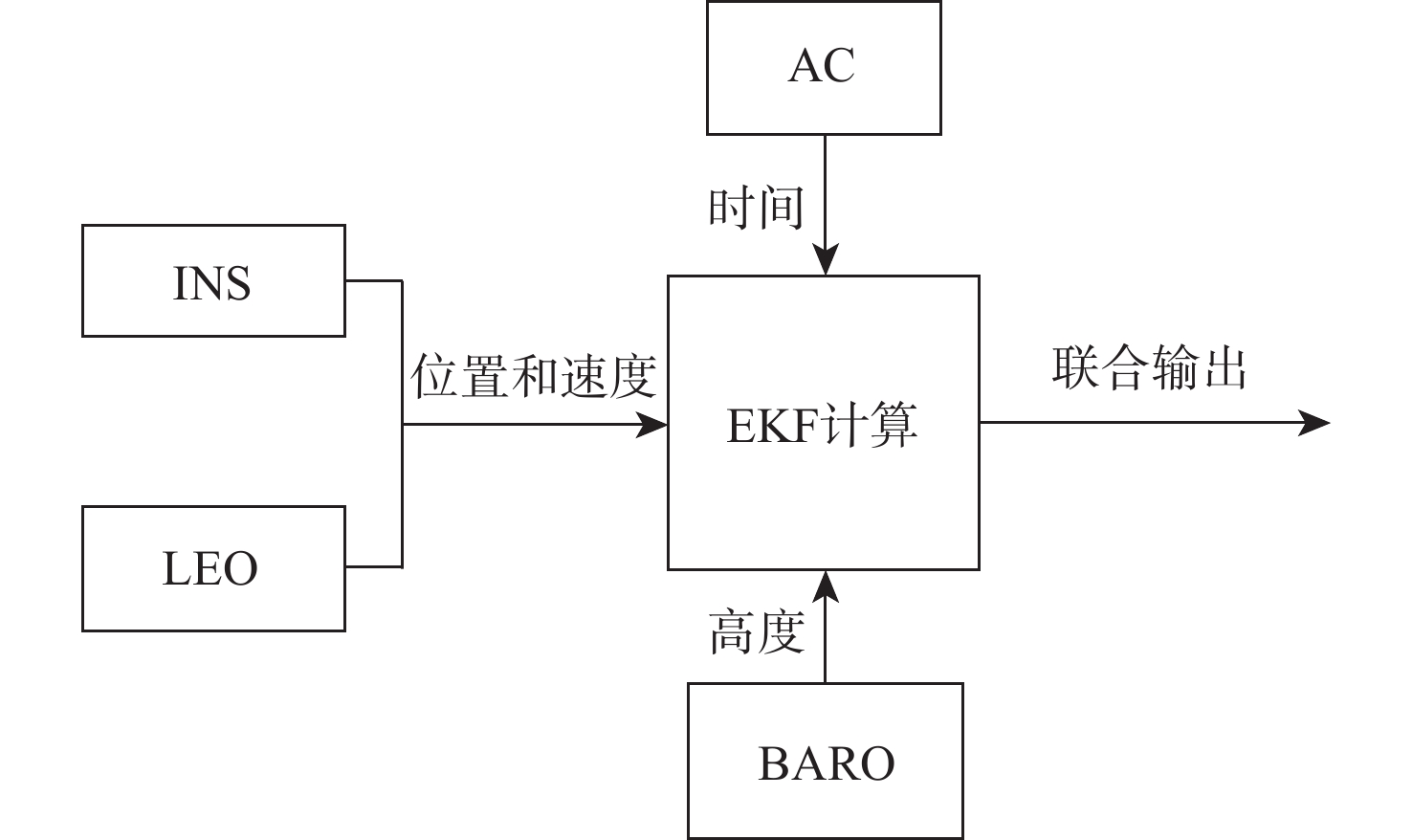
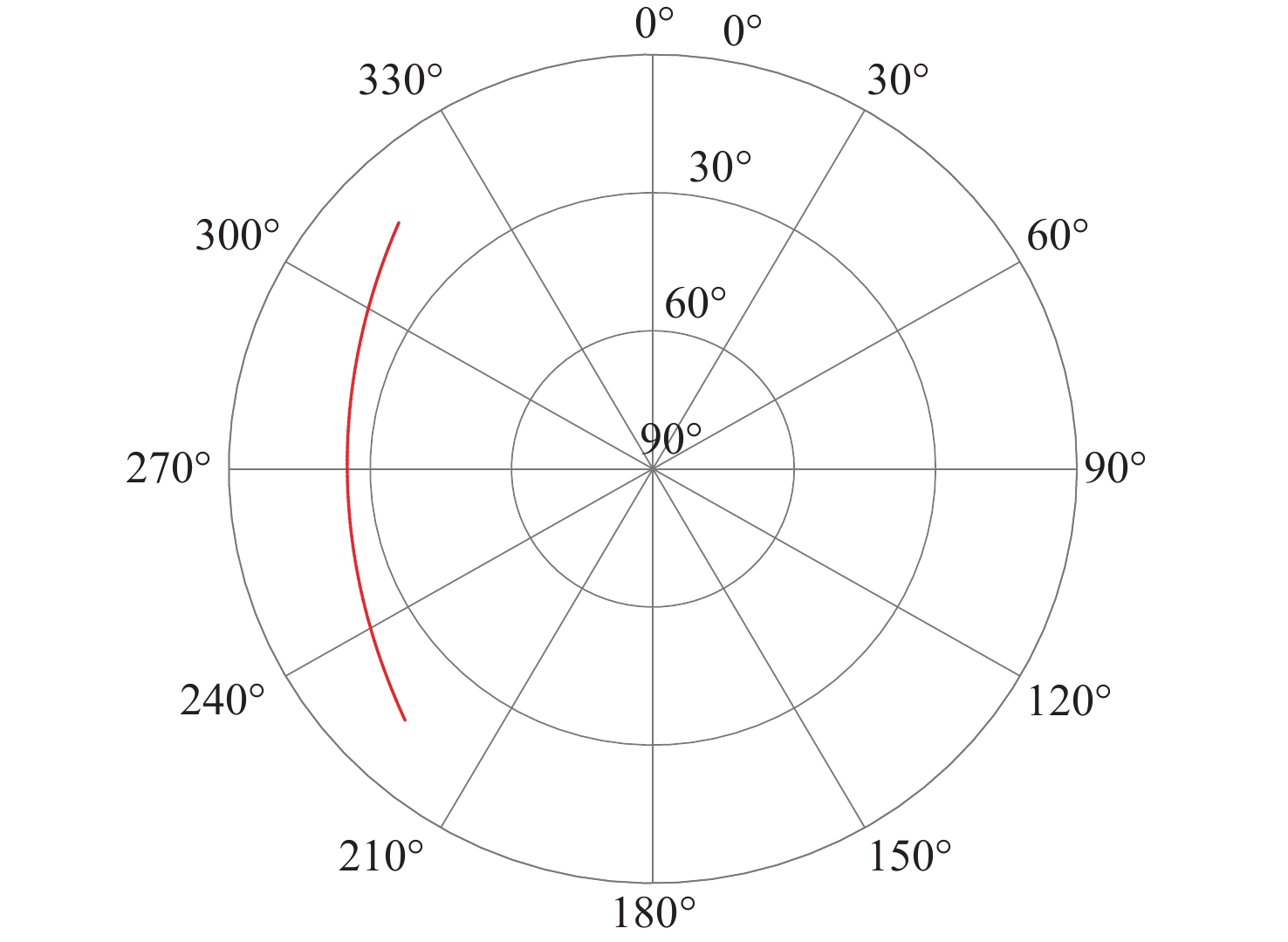
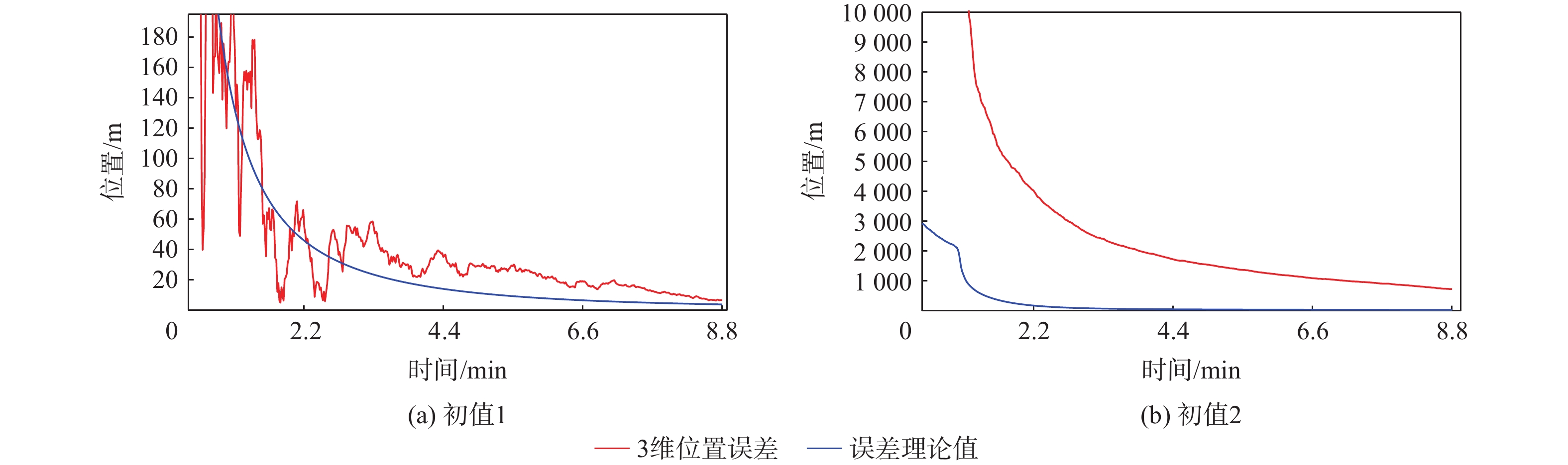
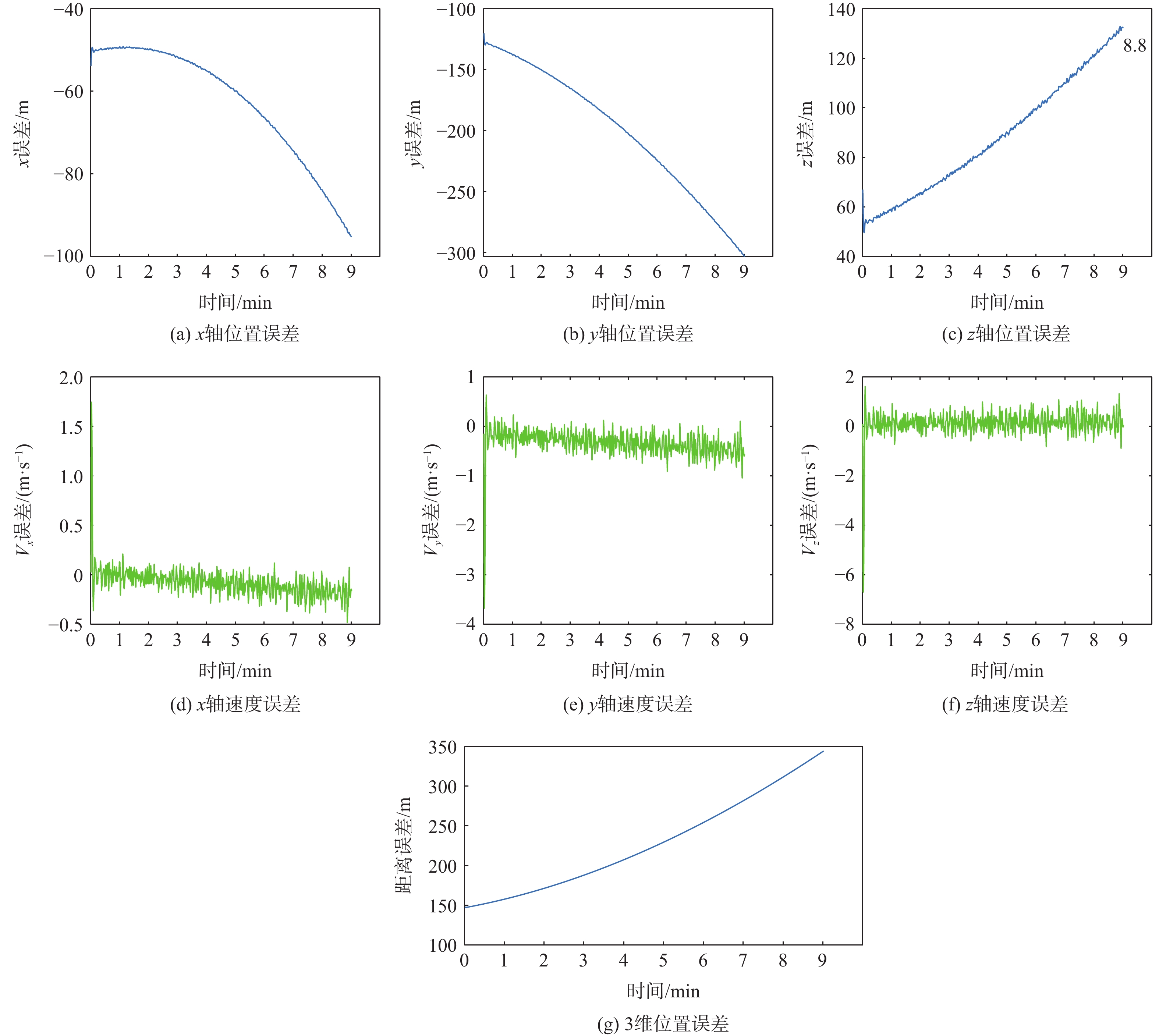
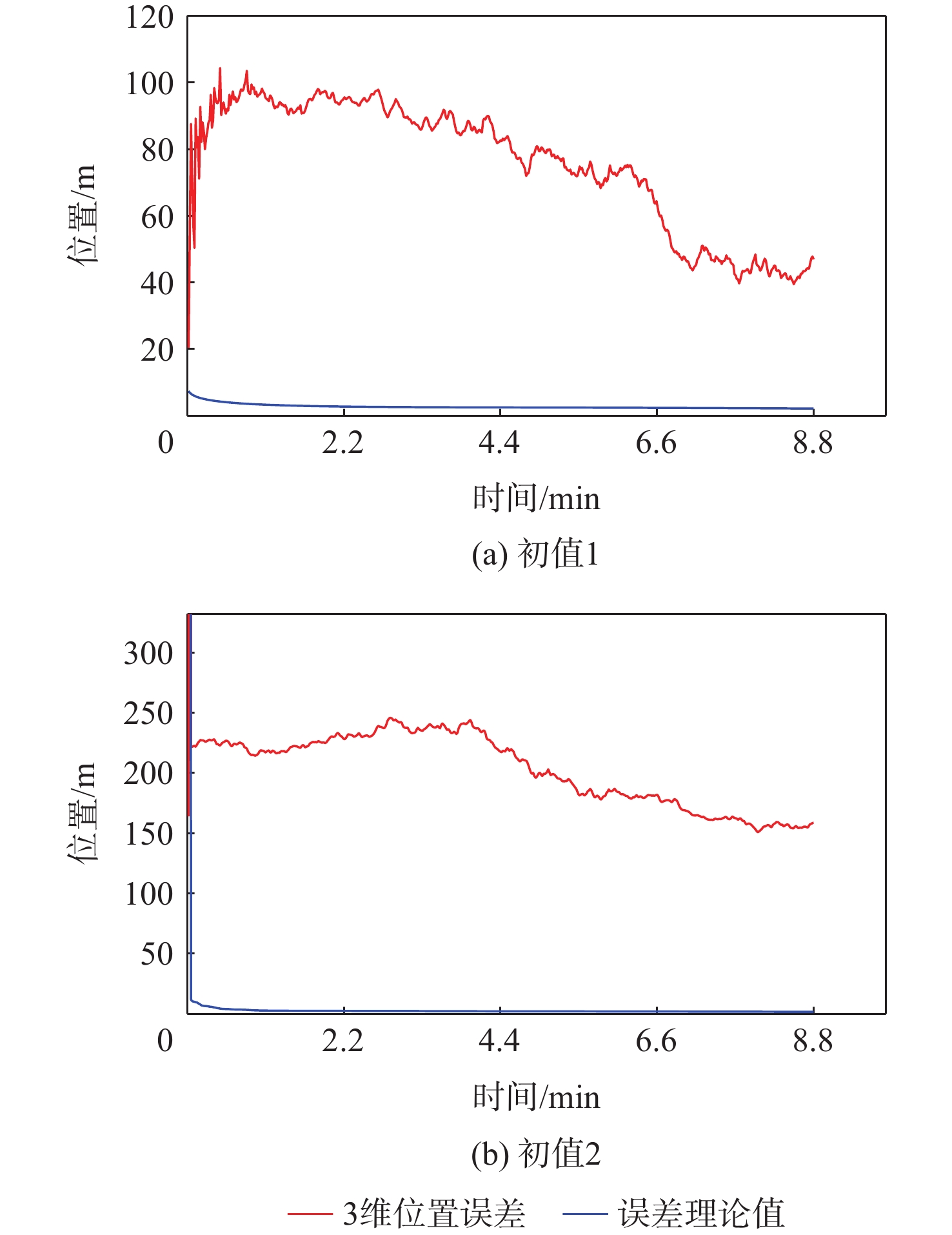
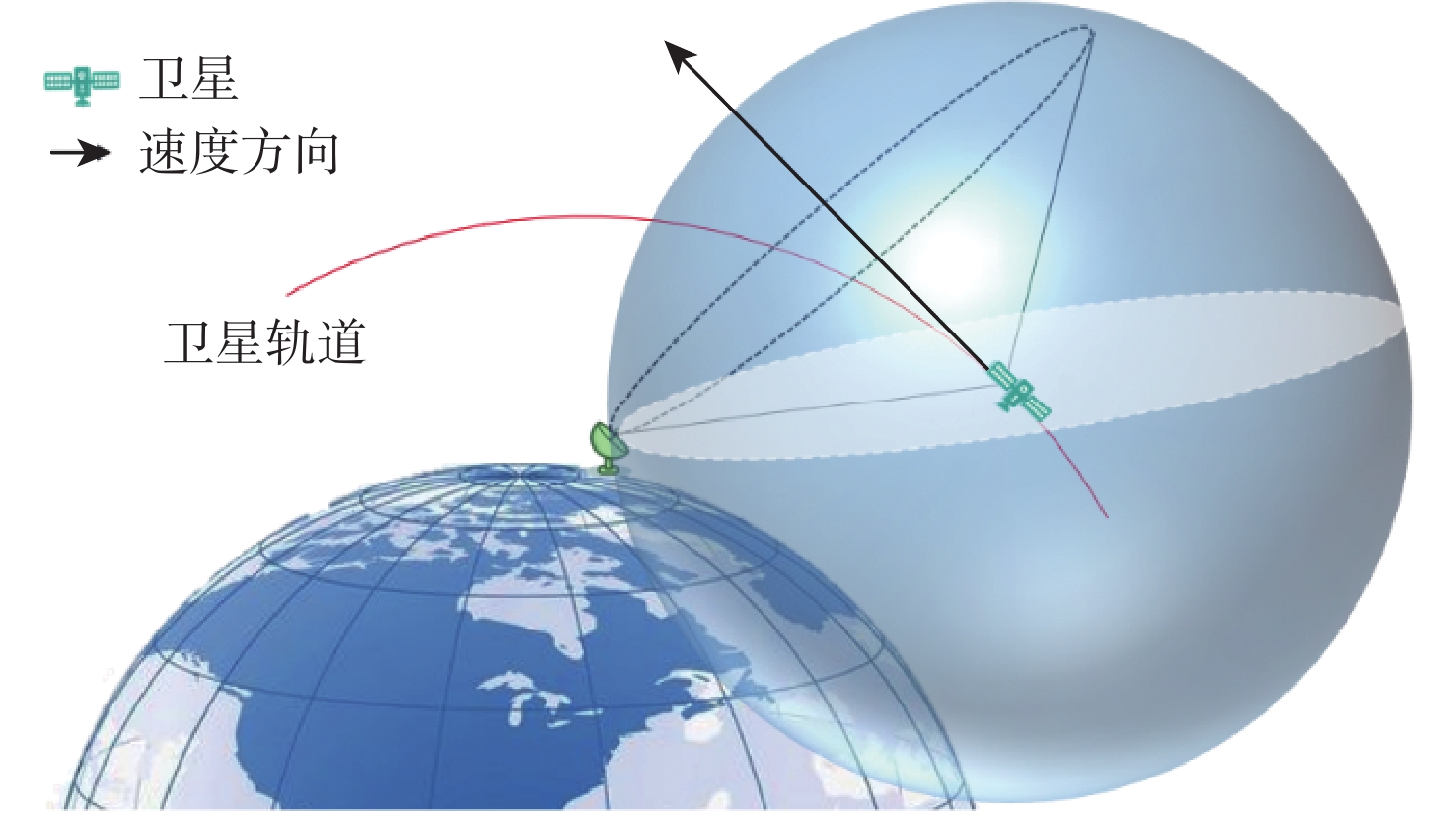
Global navigation satellite system (GNSS) is easy to be deceived and jammed in a complex electromagnetic environment, while the low earth orbit (LEO) integrated communication and navigation satellite system has the advantages of high landing power and rapid constellation geometry changes, and it is a good emergency backup navigation source. However, most of the LEO satellite systems only have 1–2 satellites visible in the middle and low latitudes, which fail to realize real-time dynamic positioning. Therefore, a combined positioning algorithm based on airborne inertial navigation system (INS) and barometer assistance was proposed. The INS and barometer were used as pseudolites, and the problem of insufficient observability was solved by configuring atomic clocks. The algorithm used the LEO satellite observation data to correct the error of the INS. At the same time, an estimability index was proposed to measure the stability of the filter for solving the problem that the observability cannot be quantitatively analyzed. The simulation verification shows that the algorithm uses the LEO observation data to reduce the INS error by about 60% within nine minutes, and the positioning error can reach up to 50 meters, realizing real-time stable positioning. The proposed estimability index can measure the stability of the system.

| [1] |
SU Y T, LIU Y Q, ZHOU Y Q, et al. Broadband LEO satellite communications: Architectures and key technologies[J]. IEEE Wireless Communications, 2019, 26(2): 55-61. doi: 10.1109/MWC.2019.1800299
|
| [2] |
TAN Y K , SCOTT C A , DEMPSTER A G . Detecting object movement through the use of two GNSS satellites[C]//Ignss Symp, JejuL Tan Y K, 2009: 103-114.
|
| [3] |
YE L , YANG Y , JING X , et al. Single-satellite integrated navigation algorithm based on broadband leo constellation communication links[J]. Remote Sensing, 2021, 13(7): 703.
|
| [4] |
DANCHIK R J. An overview of transit development[J]. Johns Hopkins Apl Technical Digest, 1998, 19(3): 18-26.
|
| [5] |
STANSELL Jr, Thomas A. Transit, the navy navigation satellite system[J]. Navigation, 1971, 18(1): 93-109. doi: 10.1002/j.2161-4296.1971.tb00077.x
|
| [6] |
LEVANON N. Instant active positioning with one LEO satellite[J]. Navigation, 1999, 46(2): 87-95. doi: 10.1002/j.2161-4296.1999.tb02397.x
|
| [7] |
LEVANON N. Quick position determination using 1 or 2 LEO satellites[J]. IEEE Transactions on Aerospace and Electronic Systems, 1998, 34(3): 736-754. doi: 10.1109/7.705883
|
| [8] |
TAN Y K. Positioning techniques with two GNSS satellites over time[C]//Proceedings of International Technical Meeting of the Satellite Division of the Institute of Navigation. Porfland: Oregon lonvention Center, 2010: 207-216.
|
| [9] |
ALSHAMAA D, MOURAD-CHEHADE F, HONEINE P. Tracking of mobile sensors using belief functions in indoor wireless networks[J]. IEEE Sensors Journal, 2018, 18(1): 310-319. doi: 10.1109/JSEN.2017.2766630
|
| [10] |
RABINOWITZ M, SPILKER J J. A new positioning system using television synchronization signals[J]. IEEE Transactions on Broadcasting, 2005, 51(1): 51-61. doi: 10.1109/TBC.2004.837876
|
| [11] |
BORENOVIC M, NESKOVIC A, NESKOVIC N. Vehicle positioning using GSM and cascade-connected ANN structures[J]. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(1): 34-46. doi: 10.1109/TITS.2012.2207116
|
| [12] |
WEBB T A, GROVES P D, CROSS P A, et al. A new differential positioning method using modulation correlation of signals of opportunity[C]// IEEE/ION Position, Location and Navigation Symposium. Piscataway: IEEE Press, 2010: 972-981.
|
| [13] |
黄高明, 景桐, 田威. 机会信号导航综述[J]. 控制与决策, 2019, 34(6): 1121-1131.
HUANG G M, JING T, TIAN W. Survey on navigation via signal of opportunity[J]. Control and Decision, 2019, 34(6): 1121-1131 (in Chinese).
|
| [14] |
MORALES J J, KHALIFE J J, KASSAS Z M. Information fusion strategies for collaborative inertial radio SLAM[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(8): 12935-12952. doi: 10.1109/TITS.2021.3118678
|
| [15] |
孙国良, 沈士团, 丁子明, 等. 一种无源双星与多普勒导航系统组合的实现方法[J]. 航空学报, 2006, 27(4): 682-686.
SUN G L, SHEN S T, DING Z M, et al. An integration method for passive RDSS and DNS[J]. Acta Aeronautica et Astronautica Sinica, 2006, 27(4): 682-686 (in Chinese).
|
| [16] |
YE L Y, YANG Y K, JING X L, et al. Single-satellite integrated navigation algorithm based on broadband LEO constellation communication links[J]. Remote Sensing, 2021, 13(4): 703. doi: 10.3390/rs13040703
|
| [17] |
KATARZYNA S, WIELGOSZ P, PAZIEWSKI J. Accuracy analysis of the Klobuchar ionosphere model transmitted by the GPS system[C]//Proceedings of the 9th International Conference on Environmental Engineering. Vilnius: J Paziewski, 2014: 246-252.
|
| [18] |
Leandro, Rodrigo , M. Santos , and R. B. Langley . UNB neutral atmosphere models: Development and performance[C]//Proceedings of the National Technical Meeting of the Institute of Navigation Ntm. Florida: IOW, 2006: 215-226.
|
| [19] |
Hargrave P J. A tutorial introduction to Kalman filtering[C]//IEE Colloquium on Kalman Filters: Introduction, Applications and Future Developments. Pissataway: IEEE Press, 1989: 1-6.
|
| [20] |
Li X R , Jilkov V P . Survey of maneuvering target tracking: decision-based methods[C]//International Symposium on Optical Science & Technology. International Society for Optics and Photonics. Paris: SPIE, 2000: 368-383.
|
| [21] |
FAWCETT J A. Effect of course maneuvers on bearings-only range estimation[J]. IEEE Transactions on Acoustics, Speech, and Signal Processing, 1988, 36(8): 1193-1199. doi: 10.1109/29.1648
|
| [22] |
LE CADRE J E, JAUFFRET C. Discrete-time observability and estimability analysis for bearings-only target motion analysis[J]. IEEE Transactions on Aerospace and Electronic Systems, 1997, 33(1): 178-201. doi: 10.1109/7.570737
|
| [23] |
滕云龙, 师奕兵, 郑植. 恶劣环境下GPS接收机定位算法研究[J]. 仪器仪表学报, 2011, 32(8): 1879-1884.
TENG Y L, SHI Y B, ZHENG Z. Research on GPS receiver positioning algorithm under bad conditions[J]. Chinese Journal of Scientific Instrument, 2011, 32(8): 1879-1884 (in Chinese).
|
| [24] |
李博, 徐超, 李孝辉, 等. 遮挡环境下原子钟和气压测高仪辅助北斗定位方法研究[J]. 电子与信息学报, 2018, 40(9): 2212-2218.
LI B, XU X, LI X H, et al. BeiDou navigation satellite system in challenge environment using an atomic clock and barometric altimeter[J]. Journal of Electronics & Information Technology, 2018, 40(9): 2212-2218.
|
Figures(9) / Tables(7)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: