| Citation: | FAN X D,TAN T Y,WU J. Lightweight multi-target detection and tracking method for small unmanned aerial vehicles[J]. Journal of Beijing University of Aeronautics and Astronautics,2026,52(2):610-619 (in Chinese) doi: 10.13700/j.bh.1001-5965.2024.0406

|
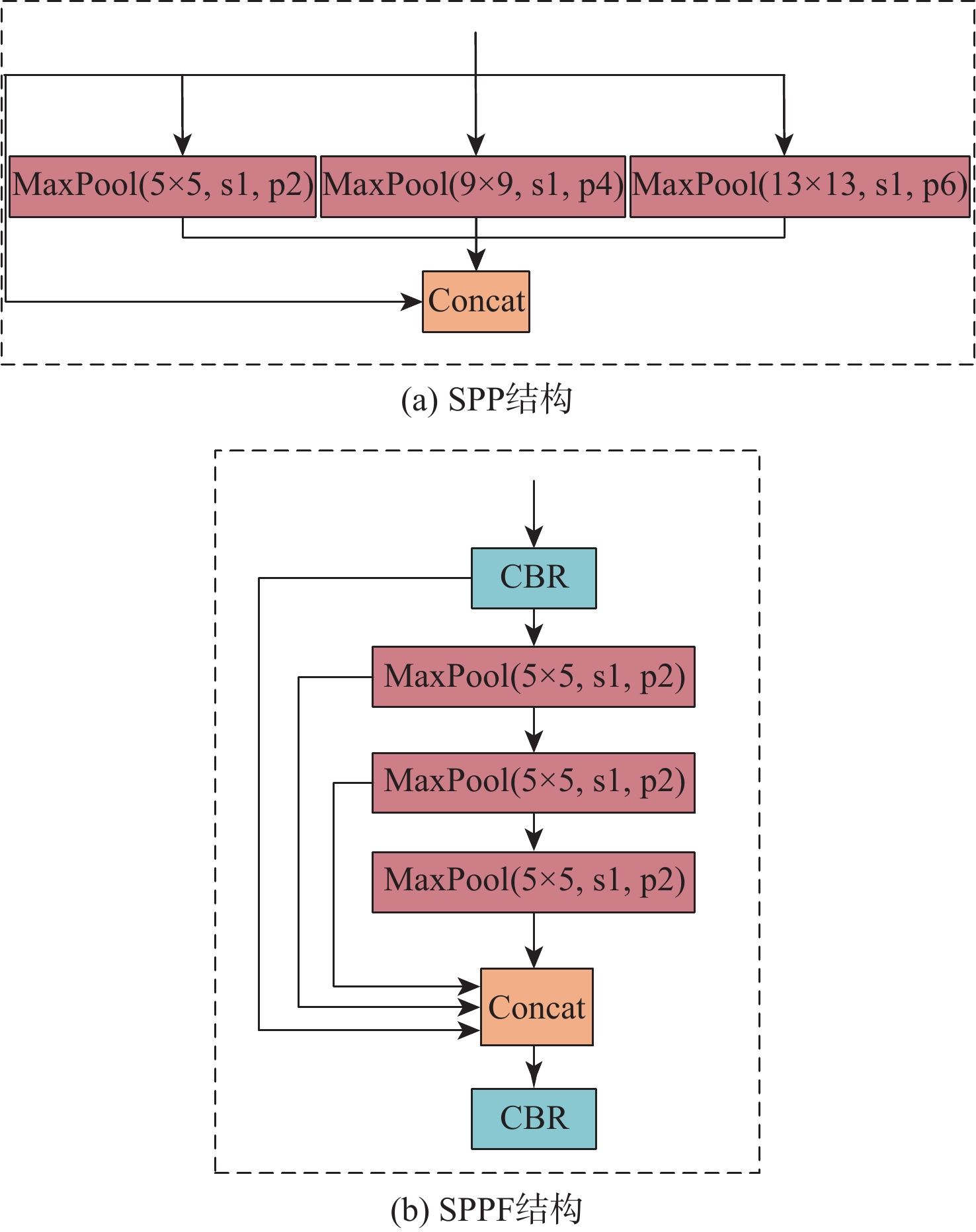
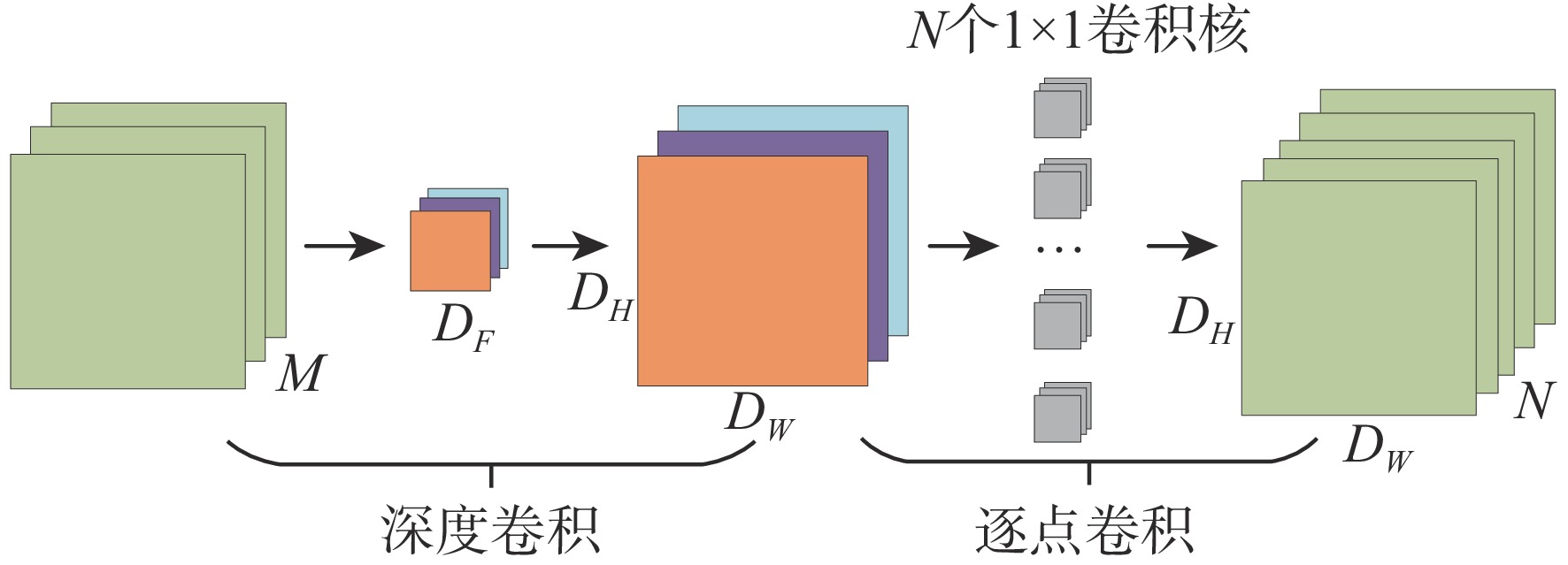
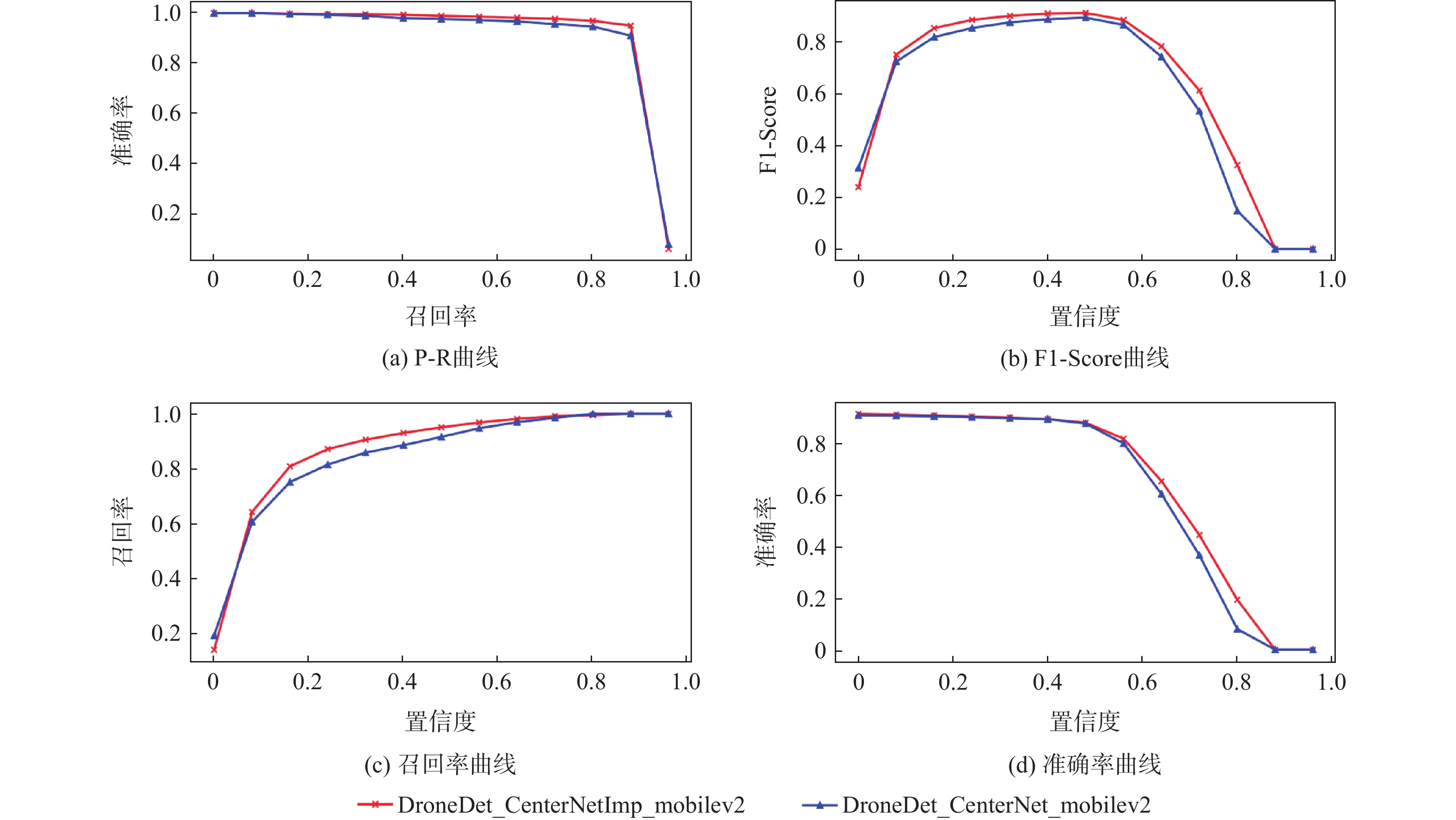
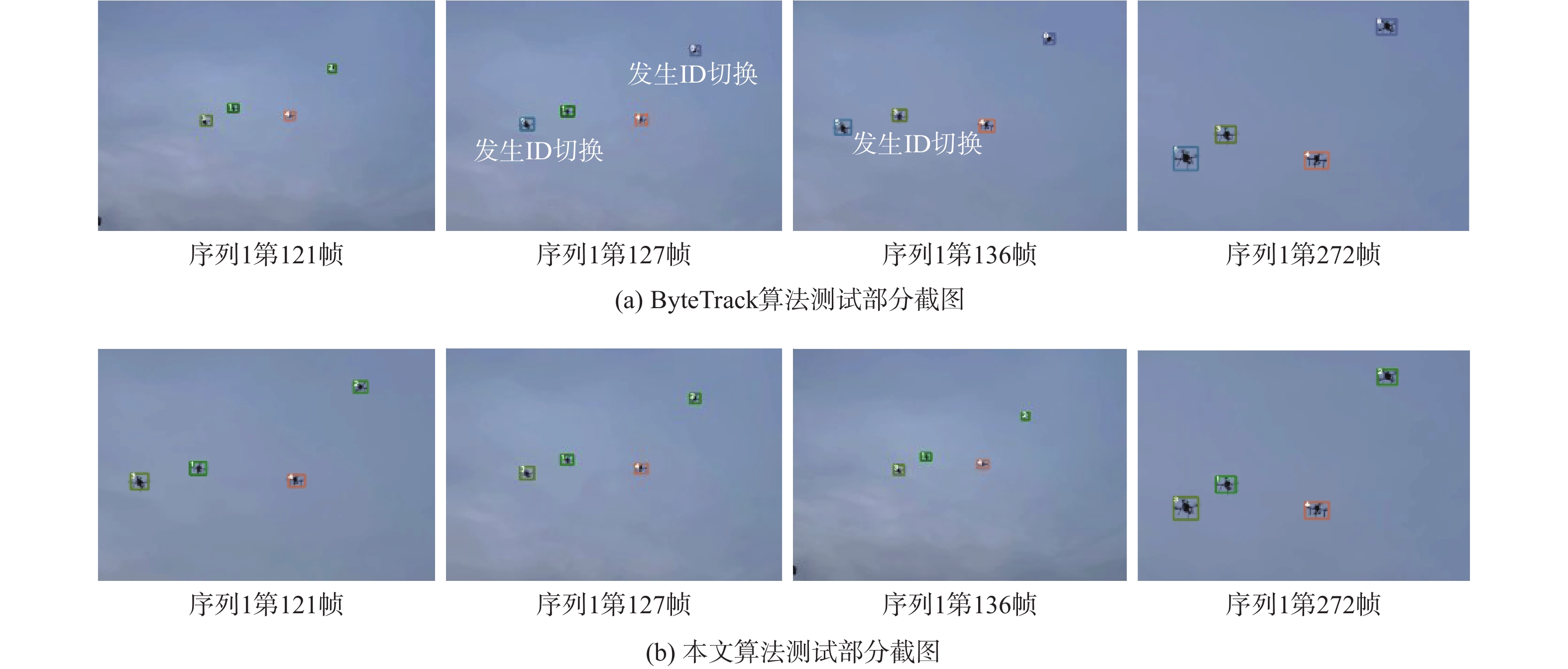
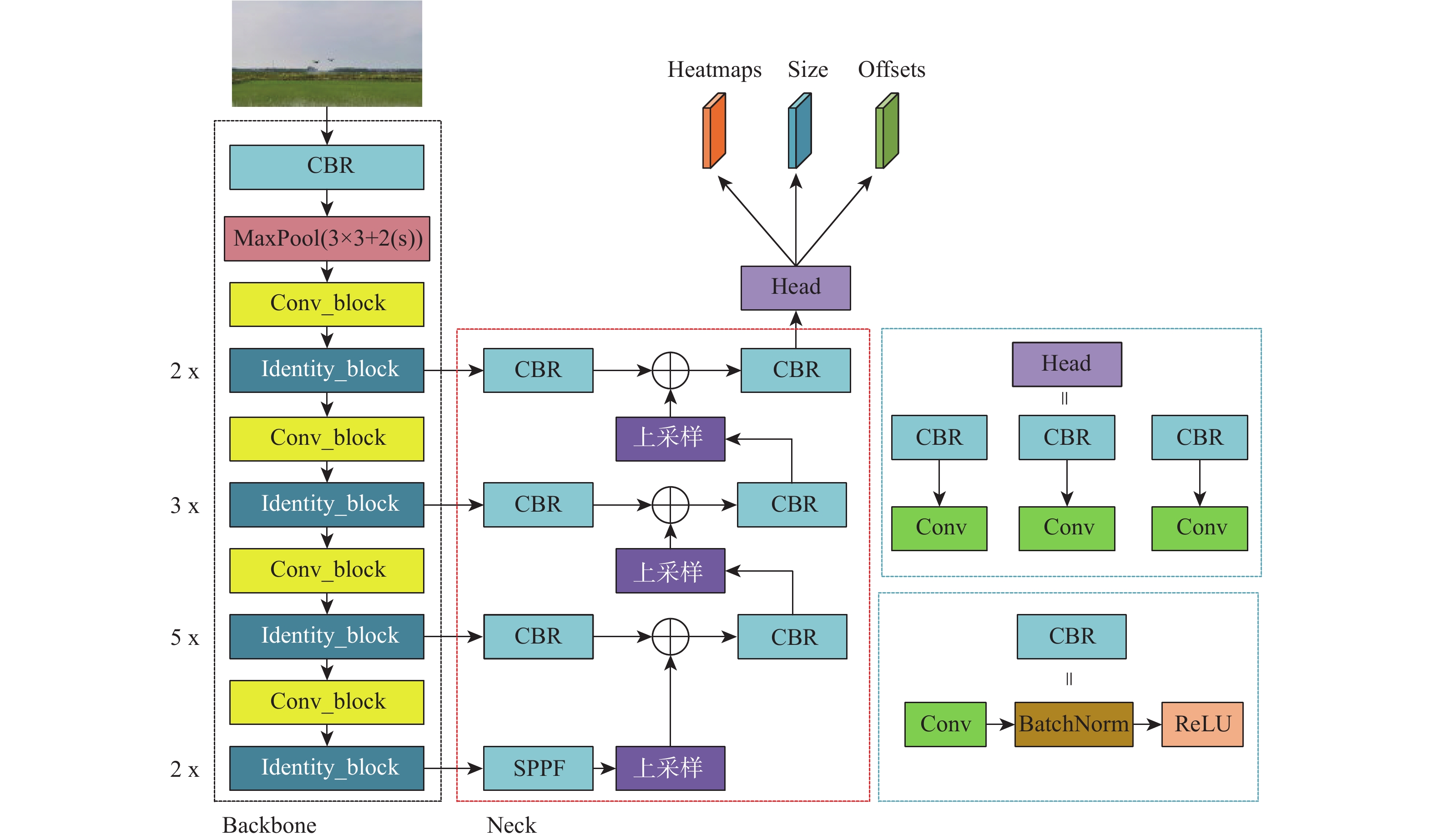
A lightweight method for detecting and tracking small unmanned aerial vehicle (UAV) targets in complex environments, such as urban and industrial areas, is proposed. Leveraging the CenterNet target detection algorithm as its foundation, this method integrates multi-level feature fusion and a rapid spatial pyramid pooling (SPPF) structure while employing the MobileNet lightweight backbone network to ensure precise detection of small UAV targets. An enhanced DeepSORT-based multi-target tracking technique is presented to overcome the inherent instability in monitoring UAV targets with telescopic cameras. This method utilizes an adaptive noise Kalman filter (NSA Kalman Filter) for target trajectory prediction and incorporates a camera motion compensation module and BYTE target association algorithm to achieve accurate tracking of multiple UAV targets. Furthermore, a dataset for detecting and tracking small UAV targets is constructed, and the proposed algorithm is trained, tested, and validated on the embedded Jetson NX device. Experimental results demonstrate a reduction of 56.9% in average model parameter count, a 1.18% increase in mAP, and a 66.5% reduction in average computational load. With an average model size of 14.5 MB and an average processing time per frame of 36.4 ms on the Jetson NX platform, the algorithm's efficacy in accomplishing accurate identification, real-time operation, and appropriateness for deployment on edge devices with constrained computational resources is confirmed.

| [1] |
HE K M, GKIOXARI G, DOLLÁR P, et al. Mask R-CNN[C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE Press, 2017: 2980-2988.
|
| [2] |
REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: Unified, real-time object detection[C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2016: 779-788.
|
| [3] |
REDMON J, FARHADI A. YOLO9000: better, faster, stronger[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2017: 6517-6525.
|
| [4] |
REDMON J, FARHADI A. Yolov3: an incremental improvement[EB/OL]. (2018-04-08) [2024-06-01]. https://doi.org/10.48550/arXiv.1804.02767.
|
| [5] |
BOCHKOVSKIY A, WANG C Y, LIAO H Y M. Yolov4: optimal speed and accuracy of object detection[EB/OL]. (2020-04-23)[2024-6-5]. https://doi.org/10.48550/arXiv.2004.10934.
|
| [6] |
WANG C Y, BOCHKOVSKIY A, LIAO H Y M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors[C]// Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2023: 7464-7475.
|
| [7] |
LIU W, ANGUELOV D, ERHAN D, et al. SSD: single shot multibox detector[C]// European Conference on Computer Vision. Berlin: Springer, 2016: 21-37.
|
| [8] |
HOWARD A G, ZHU M, CHEN B, et al. MobileNets: efficient convolutional neural networks for mobile vision applications[EB/OL]. (2017-04-17)[2024-06-05]. https://arxiv.org/abs/1704.04861.
|
| [9] |
SANDLER M, HOWARD A, ZHU M L, et al. MobileNetV2: inverted residuals and linear bottlenecks[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2018: 4510-4520.
|
| [10] |
HOWARD A, SANDLER M, CHEN B, et al. Searching for mobileNetV3[C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE Press, 2019: 1314-1324.
|
| [11] |
ZHANG X Y, ZHOU X Y, LIN M X, et al. ShuffleNet: An extremely efficient convolutional neural network for mobile devices[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2018: 6848-6856.
|
| [12] |
MA N N, ZHANG X Y, ZHENG H T, et al. ShuffleNet V2: practical guidelines for efficient CNN architecture design[C]// European Conference on Computer Vision. Berlin: Springer, 2018: 122-138.
|
| [13] |
WU B C, KEUTZER K, DAI X L, et al. FBNet: hardware-aware efficient ConvNet design via differentiable neural architecture search[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2019: 10726-10734.
|
| [14] |
DAI X, WAN A, ZHANG P, et al. FBNetV3: joint architecture-recipe search using neural acquisition function[EB/OL]. (2021-03-30)[2024-06-05]. https://doi.org/10.48550/arXiv.2006.02049.
|
| [15] |
JIANG N, WANG K R, PENG X K, et al. Anti-UAV: a large-scale benchmark for vision-based UAV tracking[J]. IEEE Transactions on Multimedia, 2021, 25: 486-500.
|
| [16] |
COLUCCIA A, FASCISTA A, SCHUMANN A, et al. Drone-Vs-Bird detection challenge at IEEE AVSS2021[C]// Proceedings of the 2021 17th IEEE International Conference on Advanced Video and Signal Based Surveillance. Piscataway: IEEE Press, 2021: 1-8.
|
| [17] |
ZHAO J, ZHANG J S, LI D D, et al. Vision-based anti-UAV detection and tracking[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(12): 25323-25334. doi: 10.1109/TITS.2022.3177627
|
| [18] |
YU Q J, MA Y C, HE J F, et al. A unified Transformer-based tracker for anti-UAV tracking[C]// Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops. Piscataway: IEEE Press, 2023: 3036-3046.
|
| [19] |
谢学立, 席建祥, 卢瑞涛, 等. 动态区域聚焦的反无人机红外长时跟踪算法[J]. 北京航空航天大学学报, 2025, 51(9): 3039-3051.
XIE X L, XI J X, LU R T, et al. Long-term infrared object tracking algorithm based on dynamic region focusing for anti-UAV[J]. Journal of Beijing University of Aeronautics and Astronautics, 2025, 51(9): 3039-3051(in Chinese).
|
| [20] |
陈家俊, 李响, 宋延嵩, 等. 双置信度下多特征自适应融合的红外弱小目标实时跟踪 [J]. 北京航空航天大学学报, 2024, 50 (2): 433-442.
Chen J J, Li X, Song Y S, et al. Real - time Tracking of Infrared Dim and Small Targets Based on Adaptive Fusion of Multi-features Under Dual Confidence Levels[J]. Journal of Beijing University of Aeronautics and Astronautics, 2024, 50(2): 433-442(in Chinese).
|
| [21] |
刘芳, 杨雨妍, 王鑫. 基于特征融合和分块注意力的无人机跟踪算法[J]. 北京航空航天大学学报, 2025, 51(5): 1566-1578.
LIU F, YANG Y Y, WANG X. UAV tracking algorithm based on feature fusion and block attention[J]. Journal of Beijing University of Aeronautics and Astronautics, 2025, 51(5): 1566-1578 (in Chinese).
|
| [22] |
MEINHARDT T, KIRILLOV A, LEAL-TAIXÉ L, et al. TrackFormer: multi-object tracking with transformers[C]// Proceedings of 2022 the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2023.
|
| [23] |
LI S Y, FISCHER T, KE L, et al. Ovtrack: open-vocabulary multiple object tracking[C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2023: 5567-5577.
|
| [24] |
QIN Z, ZHOU S P, WANG L, et al. Motiontrack: learning robust short-term and long-term motions for multi-object tracking[C]// Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2023: 17939-17948.
|
| [25] |
DUAN K W, BAI S, XIE L X, et al. Centernet: keypoint triplets for object detection[C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE Press, 2019: 6568-6577.
|
| [26] |
PUJARA A, BHAMARE M. DeepSORT: real time & multi-object detection and tracking with YOLO and TensorFlow[C]// Proceedings of the 2022 International Conference on Augmented Intelligence and Sustainable Systems. Piscataway: IEEE Press, 2022: 456-460.
|
| [27] |
DU Y H, WAN J F, ZHAO Y Y, et al. GIAOTracker: a comprehensive framework for MCMOT with global information and optimizing strategies in VisDrone 2021[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision Workshops. Piscataway: IEEE Press, 2021: 2809-2819.
|
| [28] |
AHARON N, ORFAIG R, BOBROVSKY B Z. BoT-SORT: robust associations multi-pedestrian tracking[EB/OL]. (2022-07-07)[2024-06-03]. https://doi.org/10.48550/arXiv.2206.14651.
|
Figures(7) / Tables(7)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: