| Citation: | GU Sucheng, WANG Baoxing, LIU Juncheng, et al. Deformation and end contact force of fiber-reinforced soft gripper[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(2): 447-456. doi: 10.13700/j.bh.1001-5965.2019.0251(in Chinese)

|
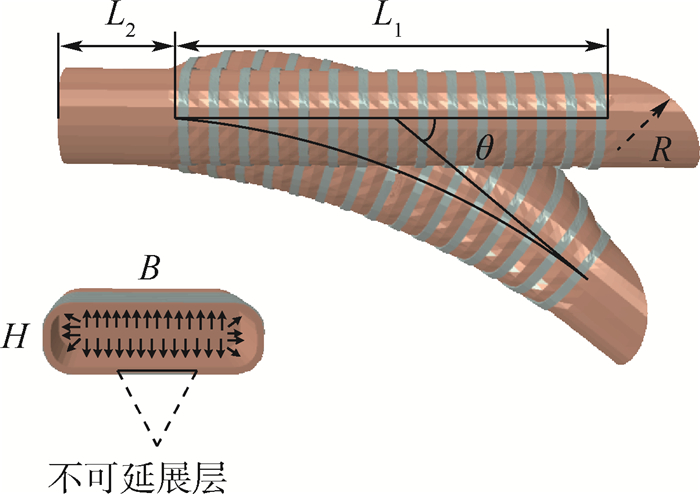
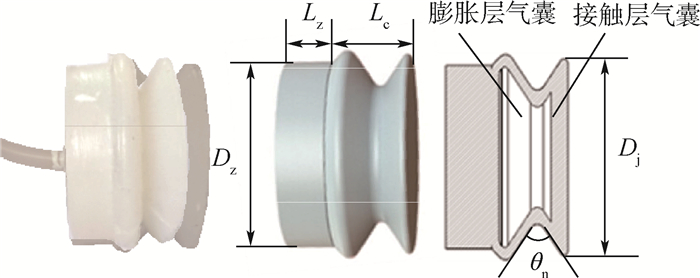
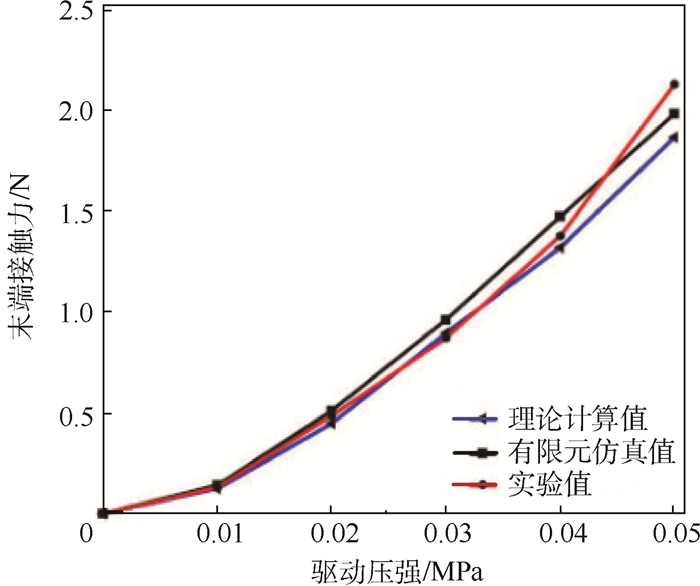
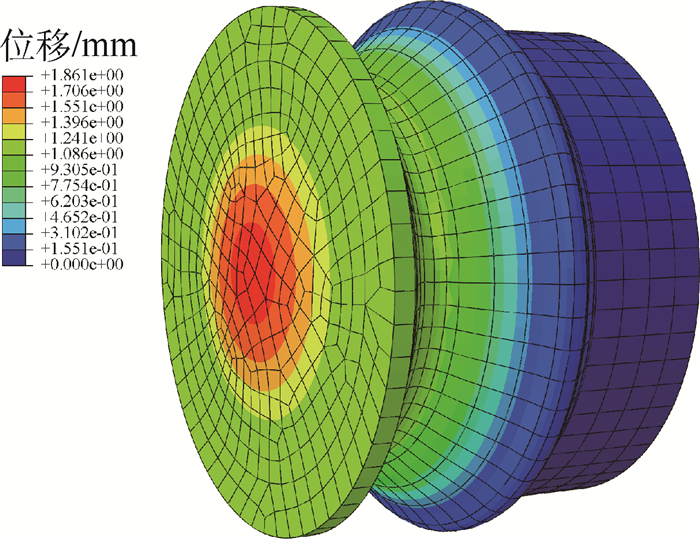
In order to solve the problem of lacking the research on the deformation and end contact force of soft robotics, a soft gripper is taken as the research object, and the research on the deformation and end contact force of fiber-reinforced soft gripper is carried out. Firstly, a soft pneumatic gripper is designed, which is composed of a unidirectional bending drive with a fiber-reinforced structure, an axially elongated contact airbag and a unitary connecting device. Secondly, a nonlinear mathematical model of curved center angle of a soft drive actuated by specific pressure is established, which is based on the Yeoh model. Based on the Neo-Hookean model, the theoretical model of the end contact force of the bending actuator is established. Then, a finite element simulation and experimental validation of the soft gripper are carried out to verify the correctness of the theoretical model. Finally, the study on the effect of fiber-reinforced structure on the deformation and end contact force of gripper is carried out. Experimental results show that fiber-reinforced structure can improve the deformation and end contact force of the soft gripper greatly. This research provides a theoretical basis for the research on the deformation and end contact force of other fiber-reinforced soft grippers.

| [1] |
李铁风, 李国瑞, 梁艺鸣, 等.软体机器人结构机理与驱动材料研究综述[J].力学学报, 2016, 242(4):756-766.
LI T F, LI G R, LIANG Y M, et al.Study on structural mechanism and driving material of soft robot[J].Chinese Journal of Theoretical Applied Mechanics, 2016, 242(4):756-766(in Chinese).
|
| [2] |
MAO S X, DONG E, JIN H.Gait study and pattern generation of a starfish-like soft robot with flexible rays actuated by SMAS[J].Journal of Bionic Engineering, 2014, 11(3):400-411.
|
| [3] |
TOLLEY M, SHEPHERD R, MOSADEGH B, et al.A resilient untethered soft robot[J].Soft Robotics, 2014, 1(3):213-223.
|
| [4] |
孙沂琳, 张秋菊, 陈宵燕.软体驱动器研究综述[J].机械设计, 2019, 36(2):5-18.
SUN Y L, ZHANG Q J, CHEN X Y.Overview of soft-bodied actuators[J].Journal of Mechanical Design, 2019, 36(2):5-18(in Chinese).
|
| [5] |
姚建涛, 陈新博, 陈俊涛, 等.轮足式仿生软体机器人设计与运动分析[J].机械工程学报, 2019, 55(5):27-35.
YAO J T, CHEN X B, CHEN J T, et al.Design and motion analysis of a wheel-foot bionic software robot[J].Journal of Mechanical Engineering, 2019, 55(5):27-35(in Chinese).
|
| [6] |
樊继壮, 于庆国, 袁博文, 等.软体仿蛙游动机器人关节式气动致动器研制[J].机器人, 2018, 40(5):578-586.
FAN J Z, YU Q G, YUAN B W, et al.Development of a joint-like pneumatic actuator applied to soft frog-inspired swimming robot[J].Robot, 2018, 40(5):578-586(in Chinese).
|
| [7] |
胡兵兵, 金国庆.一种仿虎甲幼虫的多驱动器软体机器人的设计与制造[J].机器人, 2018, 40(5):626-633.
HU B B, JIN G Q.Design and fabrication of a multi-actuator soft robot inspired by young tiger beetle[J].Robot, 2018, 40(5):626-633(in Chinese).
|
| [8] |
董红兵.一种充气式软体全向弯曲模块关键技术研究[D].哈尔滨: 哈尔滨工业大学, 2016.
DONG H B.Research on key technologies of a pneumatic soft omnidirectional bending module[D]. Harbin: Harbin Institute of Technology, 2016(in Chinese).
|
| [9] |
YAP H, KAMALDIN N, LIM J, et al.A magnetic resonance compatible soft wearable robotic glove for hand rehabilitation and brain imaging[J].IEEE Transactions on Neural Systems & Rehabilitation Engineering, 2017, 6(25):782-793.
|
| [10] |
NORITSUGU T, KUBOTA M, YOSHIMATSU S.Development of pneumatic rotary soft actuator made of silicon rubber[J].Journal of Robotics and Mechatronics, 2001, 13(1):17-22.
|
| [11] |
徐淼鑫.气压驱动软体夹持装置研究[D].南京: 南京理工大学, 2015.
XU M X.Research on pneumatic driving software clamping device[D].Nanjing: Nanjing University of Science and Technology, 2015(in Chinese).
|
| [12] |
费燕琼, 庞武, 于文博.气压驱动软体机器人运动研究[J].机械工程学报, 2017, 53(13):14-18.
FEI Y Q, PANG W, YU W B.Study on motion of air-driven soft robot[J].Journal of Mechanical Engineering, 2017, 53(13):14-18(in Chinese).
|
| [13] |
CONNOLLY F, WALSH C J, BERTOLDI K.Automatic design of fiber-reinforced soft actuators for trajectory matching[J].Proceedings of the National Academy of Sciences of the United States of America, 2017, 114(1):51-56.
|
| [14] |
张忠强, 邹娇, 丁建宁, 等.软体机器人驱动研究现状[J].机器人, 2018, 40(5):648-659.
ZHANG Z Q, ZOU J, DING J N, et al.Research status of the soft robot driving[J].Robot, 2018, 40(5):648-659(in Chinese).
|
| [15] |
PEDRO P, ANANDA C, RAFAEL P B, et al.Closed structure soft robotic gripper[C]//IEEE International Conference on Soft Robotics.Piscataway, NJ: IEEE Press, 2018: 66-70.
|
| [16] |
LASCHI C, CIANCHETTI M, MAZZOLAI B, et al.Soft robot arm inspired by the octopus[J].Advanced Robotics, 2012, 26(7):709-727.
|
| [17] |
郭钟华, 李小宁, 林浩鹏.基于主动包络和负压塑形的软体适形夹持器[J].机械工程学报, 2019, 55(12):215-221.
GUO Z H, LI X N, LIN H P.Soft conformal gripper based on active envelope and negative pressure shaping[J].Journal of Mechanical Engineering, 2019, 55(12):215-221(in Chinese).
|
| [18] |
魏树军, 王天宇, 谷国迎.基于纤维增强型驱动器的气动软体抓手设计[J].机械工程学报, 2017, 53(13):29-38.
WEI S J, WANG T Y, GU G Y.Design of pneumatic soft grips based on fiber reinforced drivers[J].Chinese Journal of Mechanical Engineering, 2017, 53(13):29-38(in Chinese).
|
| [19] |
GALLOWAY K C, KAITLYN P B, PHILLIPS B, et al.Soft robotic grippers for biological sampling on deep reefs[J].Soft Robotics, 2016, 3(1):2169-5172.
|
| [20] |
HAO Y F, GONG Z, XIE Z, et al.Universal soft pneumatic robotic gripper with variable effective length[C]//Proceedings of the 35th Chinese Control Conference.Piscataway, NJ: IEEE Press, 2016: 6109-6114.
|
| [21] |
王宁扬, 孙昊, 姜皓, 等.一种基于蜂巢气动网络的软体夹持器抓取策略研究[J].机器人, 2016, 38(3):371-384.
WANG N Y, SUN H, JIANG H, et al.On grasp strategy of honeycomb pneuNets soft gripper[J].Robot, 2016, 38(3):371-384(in Chinese).
|
| [22] |
YU D, MARTIN S, XU W L.A soft ring-shaped actuator for radial contracting deformation:Design and modeling[J].Soft Robotics, 2019, 6(4):444-454.
|
| [23] |
LI H, YAO J T, ZHOU P C, et al.High-load soft grippers based on bionic winding effects[J].Soft Robotics, 2018, 6(2):276-288.
|
| [24] |
WU P C, LIN N, LEI T, et al.A new grasping mode based on a sucked-type underactuated hand[J].Chinese Journal of Mechanical Engineering, 2018, 31(6):25-33.
|
| [25] |
MANTI M, HASSAN T, PASSETTI G, et al.A bioinspired soft robotic gripper for adaptable and effective grasping[J].Soft Robotics, 2015, 2(3):107-116.
|
| [26] |
BROWN E, RODENBER N, AMEND J, et al.Universal robotic gripper based on the jamming of granular material[J].Proceedings of the National Academy of Sciences of the United States of America, 2010, 107(44):18809-18814.
|
| [27] |
ELSAYED A, VINCENSI A, LEKAKOU C, et al.Finite element analysis mad design optimization of a pneumatically actuating silicone module for robotic surgery applications[J].Soft Robotics, 2014, 1(4):255-262.
|
| [28] |
董虎, 林苗, 顾苏程, 等.多向气动驱动器软体仿生舌弯曲状态的研究[J].北京航空航天大学学报, 2019, 45(9):1882-1893.
DONG H, LIN M, GU S C, et al.The research on the motion characteristics of soft bionic tongue based on multi-directional pneumatic actuator[J].Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(9):1882-1893(in Chinese).
|
| [29] |
WANG Z, POLYGERINOS P, JOHANNES T B, et al.Interaction forces of soft fiber reinforced bending actuators[J].IEEE/ASME Transactions on Mechatronics, 2017, 22(2):717-727.
|
| [30] |
黄建龙, 解广娟, 刘正伟.基于Mooney-Rivlin模型和Yeoh模型的超弹性橡胶材料有限元分析[J].橡胶工业, 2008, 55(8):467-471.
HUANG J L, XIE G J, LIU Z W.The finite element analysis of super-elastic rubber material based on Mooney-Rivlin model and Yeoh model[J].China Rubber Industry, 2008, 55(8):467-471(in Chinese).
|

Figures(18) / Tables(7)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: