



-
摘要:
舰载机在任务繁忙和障碍密集的飞行甲板上运动,为了降低舰载机的能耗和增加发动机使用寿命,一般由牵引车牵引舰载机运动,舰载机和牵引车构成牵引系统。为了提高牵引系统出行任务的安全高效性,提出了一种甲板环境下的牵引系统路径规划方法。建立了路径规划的数学模型,该模型包括牵引系统运动学模型和机动能力约束,任务目标函数和任务约束模型,以及障碍物规避模型。结合上述模型,基于几何学理论和Dijkstra算法设计了最优路径的搜索方法。以尼米兹级航母飞行甲板为例,进行了牵引系统的路径规划和跟踪控制仿真,结果表明了模型的合理性和方法的有效性。
Abstract:A carrier aircraft moves on a carrier flight deck which has the characteristics of heavy workloads and multiple obstacles. In order to reduce energy consumption of the carrier aircraft and improve service life of the aircraft engine, the carrier aircraft is usually dragged by a tractor on the flight deck, and both of them form a traction system. In order to make the traction system can safely and efficiently complete travel missions, a method is proposed for path planning of the traction system on the flight deck. Mathematic models of path planning are established, which include kinematics models and maneuverability constraints of the traction system, a mission objective function and mission constraints models, and obstacle avoidance models. According to the above models, a method to search the optimal path is designed based on geometry theory and Dijkstra's algorithm. Taking a Nimitz class carrier as an example, a path of the traction system on the flight deck is planned and tracking control simulation is carried out. The simulation results verify the reasonability of the models and the effectiveness of the method.
-
Key words:
- carrier aircraft /
- aircraft carrier /
- flight deck /
- path planning /
- obstacle avoidance
-
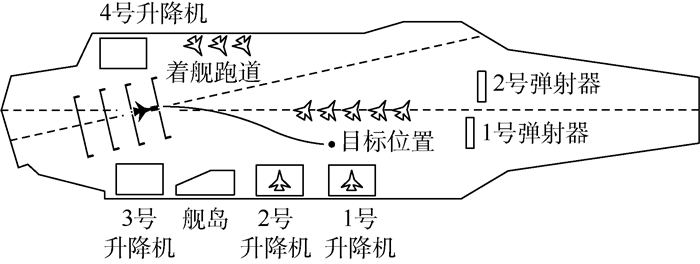
表 1 停放在飞行甲板上的舰载机位置及方向
Table 1. Positions and directions of carrier aircraft parked on flight deck
位置/m 方向/(°) (82, 23) -90 (120, 12) 60 (134, 12) 60 (148, 12) 60 (162, 12) 60  下载: 导出CSV
下载: 导出CSV
表 2 牵引系统参数
Table 2. Parameters of traction system
参数 数值 |θ|max/(°) 60 |α|max/(°) 60 l1/m 3 l2/m 8 l3/m 4 舰载机特征圆半径/m 8 舰载机后起落架间距/m 6 牵引车特征圆半径/m 2.5 v1/(m·s-1) 3
下载: 导出CSV
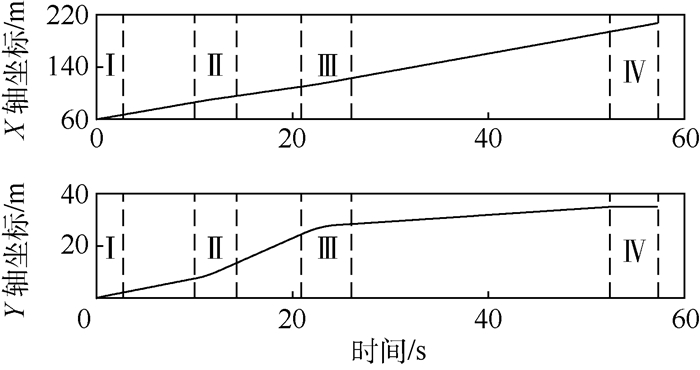
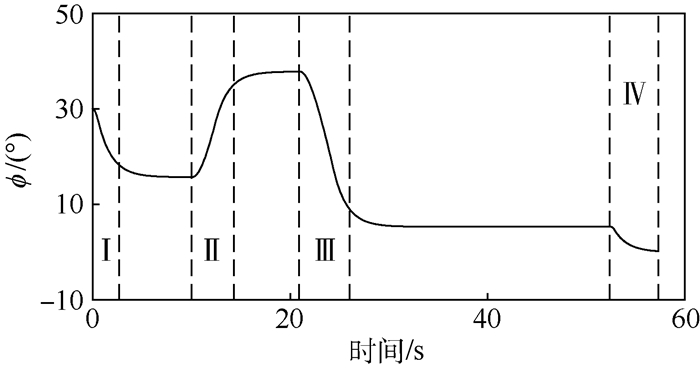
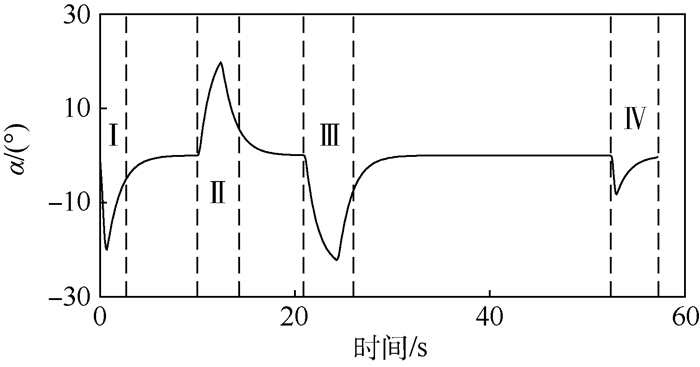
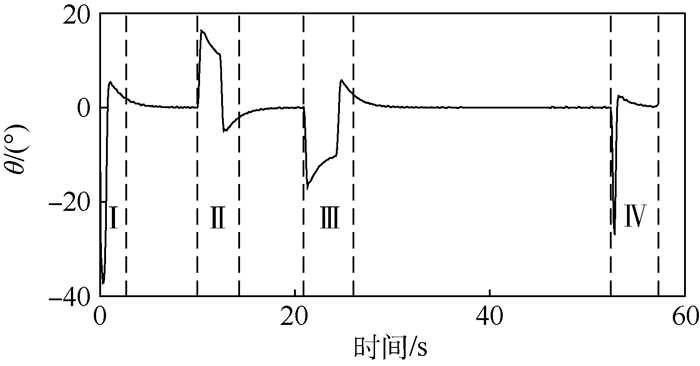
表 3 仿真结果描述
Table 3. Description of simulation results
阶段 牵引系统运动 Ⅰ 调整初始方向 Ⅰ 规避单体障碍 Ⅲ 规避多体障碍 Ⅳ 调整末端方向
下载: 导出CSV
-
[1] 刘相春, 卢晶, 黄祥钊.国外航母舰载机出动回收能力指标体系分析[J].中国舰船研究, 2011, 6(4):1-7. doi: 10.3969/j.issn.1673-3185.2011.04.001LIU X C, LU J, HUANG X Z.Analysis on the index system of sortie generation capacity of embarked aircrafts[J].Chinese Journal of Ship Research, 2011, 6(4):1-7(in Chinese). doi: 10.3969/j.issn.1673-3185.2011.04.001 [2] MICHINI B, HOW J P.A human-interactive course of action planner for aircraft carrier deck operations[C]//Proceedings of AIAA Information Technology.Reston: AIAA, 2011: 1515. doi: 10.2514/6.2011-1515 [3] ZHANG Z, LIN S L, DONG R, et al.Designing a human-computer cooperation decision planning system for aircraft carrier deck scheduling[C]//Proceedings of AIAA Information Technology.Reston: AIAA, 2015: 1111. doi: 10.2514/6.2015-1111 [4] WU Y, SUN L G, QU X J.A sequencing model for a team of aircraft landing on the carrier[J].Aerospace Science and Technology, 2016, 54(1):72-87. http://www.sciencedirect.com/science/article/pii/S1270963816301377 [5] WU Y, QU X J.Path planning for taxi of carrier aircraft launching[J].Science China Technological Sciences, 2013, 56(6):1561-1570. doi: 10.1007/s11431-013-5222-5 [6] WU Y, QU X J.Obstacle avoidance and path planning for carrier aircraft launching[J].Chinese Journal of Aeronautics, 2015, 28(3):1-10. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hkxb-e201503008 [7] ZHENG Y, ZHANG Z, XIA G H.Complex-shaped object path planning algorithm with kinematics and terminal pose constraints[C]//27th Chinese Control and Decision Conference.Piscataway, NJ: IEEE Press, 2015: 3408-3412. http://ieeexplore.ieee.org/document/7162511/ [8] 刘洋, 章卫国, 李广文, 等.动态环境中的无人机路径规划方法[J].北京航空航天大学学报, 2014, 40(2):252-256. http://bhxb.buaa.edu.cn/CN/abstract/abstract12857.shtmlLIU Y, ZHANG W G, LI G W, et al.Path planning of UAV in dynamic environment[J].Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(2):252-256(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract12857.shtml [9] ZHU W R, DUAN H B.Chaotic predator-prey biogeography-based optimization approach for UCAV path planning[J].Aerospace Science and Technology, 2014, 32(1):153-161. doi: 10.1016/j.ast.2013.11.003 [10] XU C F, DUAN H B, LIU F.Chaotic artificial bee colony approach to uninhabited combat air vehicle(UCAV) path planning[J].Aerospace Science and Technology 2010, 14(8):535-541. doi: 10.1016/j.ast.2010.04.008 [11] 韩维, 司维超, 丁大春, 等.基于聚类PSO算法的舰载机舰面多路径动态规划[J].北京航空航天大学学报, 2013, 39(5):610-614. http://bhxb.buaa.edu.cn/CN/abstract/abstract12612.shtmlHAN W, SI W C, DING D C, et al.Multi-routes dynamic planning on deck of carrier plane based on clustering PSO[J].Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(5):610-614(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract12612.shtml [12] 林圣琳.舰载机甲板作业辅助规划系统设计与实现[D].哈尔滨: 哈尔滨工程大学, 2014: 12-31.LIN S L.Designing and Realizing an auxiliary planning system for aircraft scheduling on deck[D].Harbin: Harbin Engineering University, 2014: 12-31(in Chinese). [13] BLACKMORE L, ONO M, WILLIAMS B C.Chance-constrained optimal path planning with obstacles[J].IEEE Transactions on Robotics, 2011, 27(6):1080-1094. doi: 10.1109/TRO.2011.2161160 [14] MUROTA K, SHIOURA A.Dijkstra's algorithm and L-concave function maximization[J].Mathematical Programming, 2014, 145(1-2):163-177. doi: 10.1007/s10107-013-0643-2 [15] GUNKEL C, STEPPER A, MULLER A C, et al.Micro crack detection with Dijkstra's shortest path algorithm[J].Machine Vision and Applications, 2012, 23(3):589-601. doi: 10.1007/s00138-011-0324-1 [16] QIN S J, BADGWELL T A.A survey of industrial model predictive control technology[J].Control Engineering Practice, 2003, 11(7):733-764. doi: 10.1016/S0967-0661(02)00186-7 [17] MAYNE D Q, RAWLINGS J B, RAO C V, et al.Constrained model predictive control:Stability and optimality[J].Automatica, 2000, 36(6):789-814. doi: 10.1016/S0005-1098(99)00214-9 [18] KOURO S, CORTES P, VARGAS R, et al.Model predictive control-A simple and powerful method to control power converters[J].IEEE Transactions on Industrial Electronics, 2009, 56(6):1826-1838. doi: 10.1109/TIE.2008.2008349 -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 752
- HTML全文浏览量: 65
- PDF下载量: 427
- 被引次数: 0
