| Citation: | ZHANG Jing, WU Yu, QU Xiangjuet al. Path planning method for traction system on carrier aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(10): 2125-2133. doi: 10.13700/j.bh.1001-5965.2017.0787(in Chinese)

|
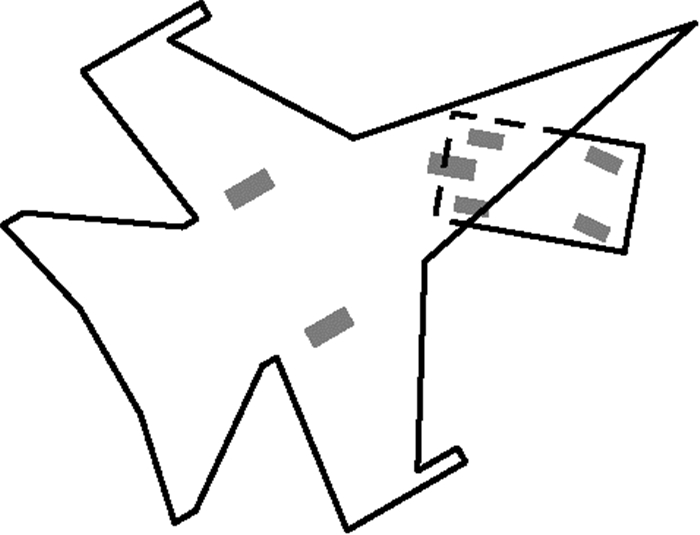
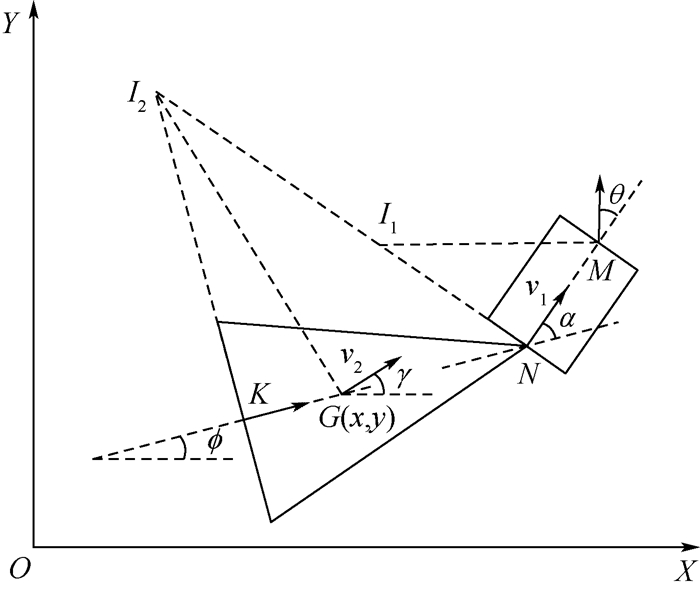
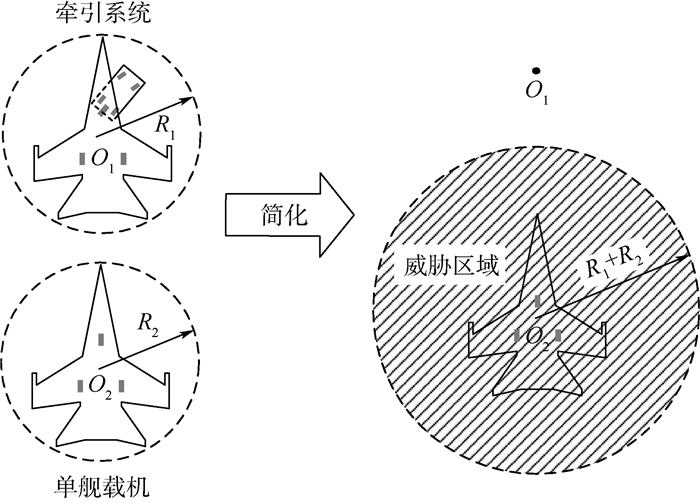
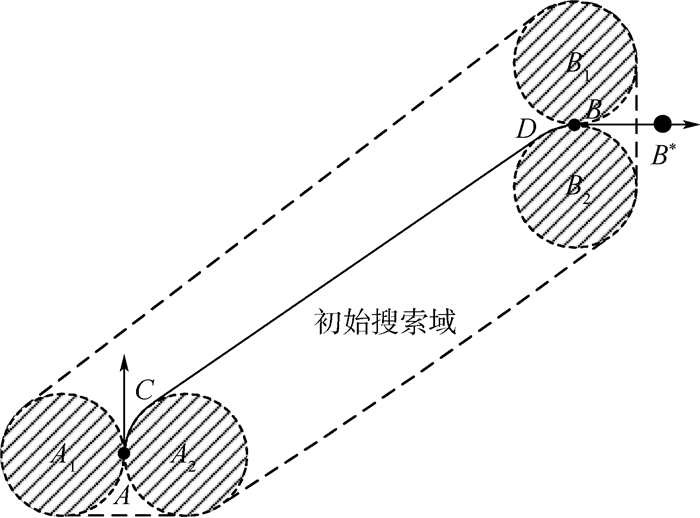
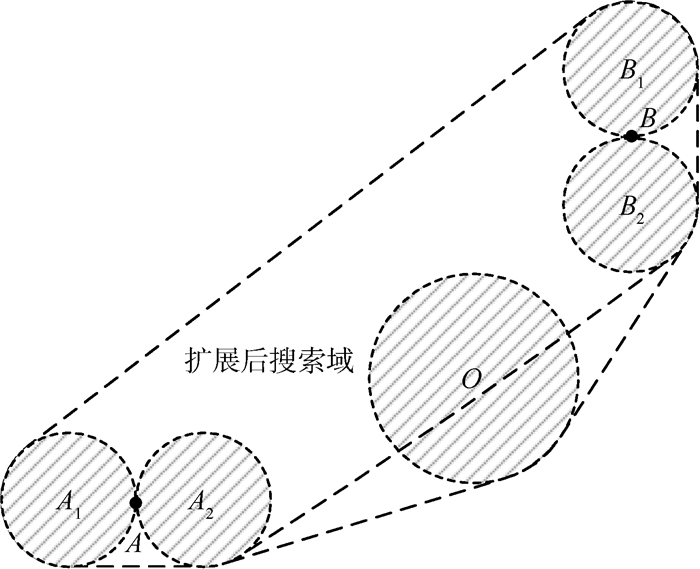
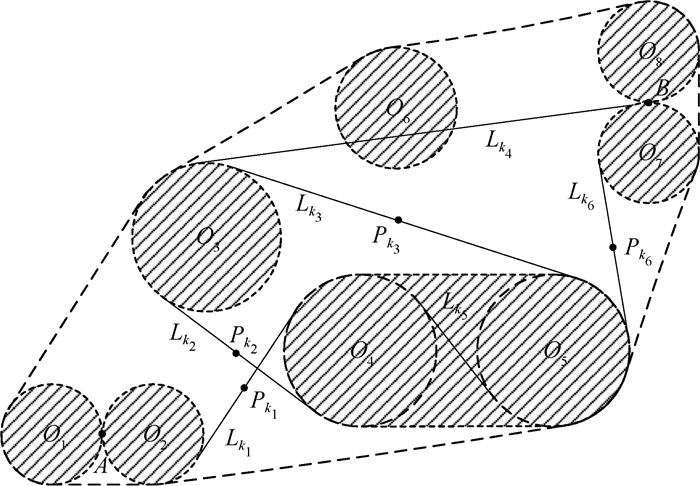
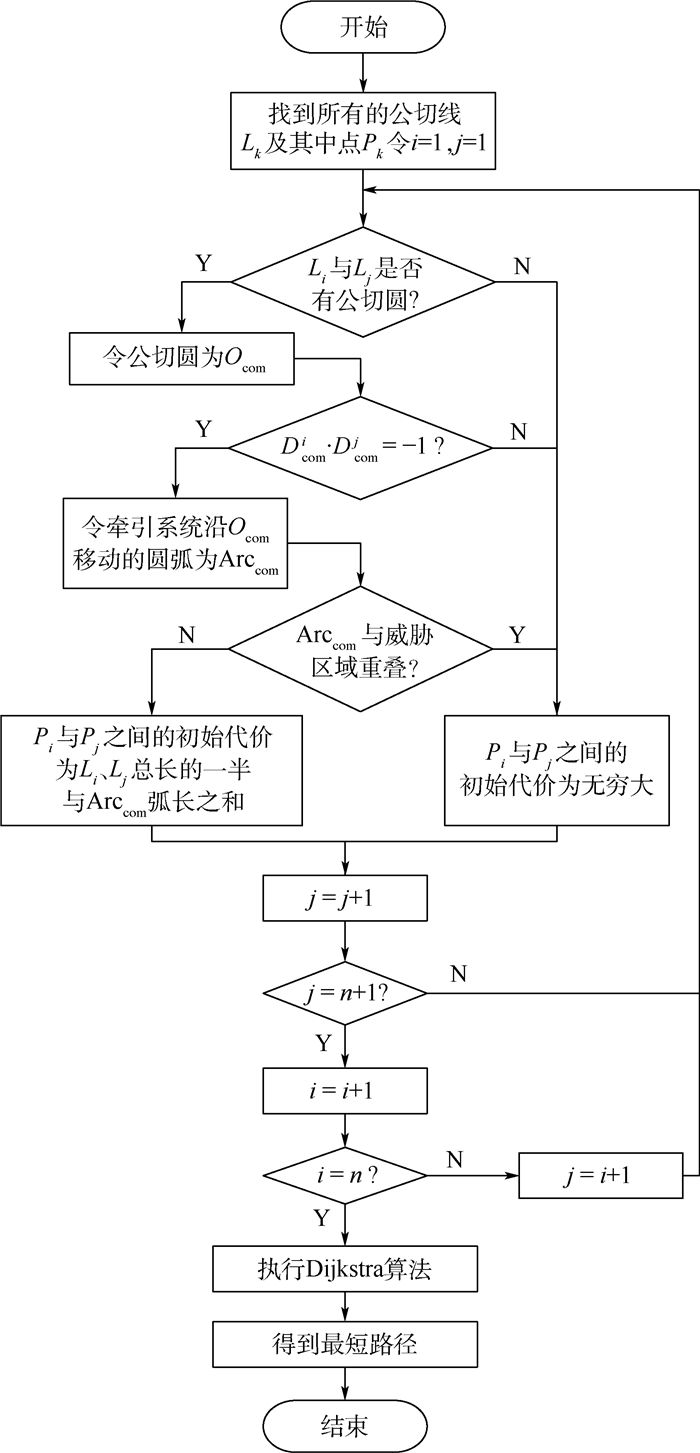
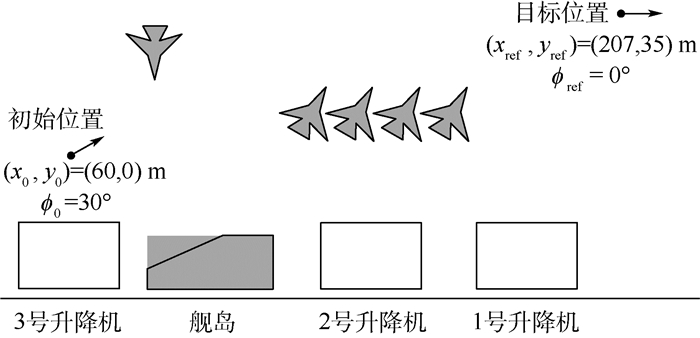
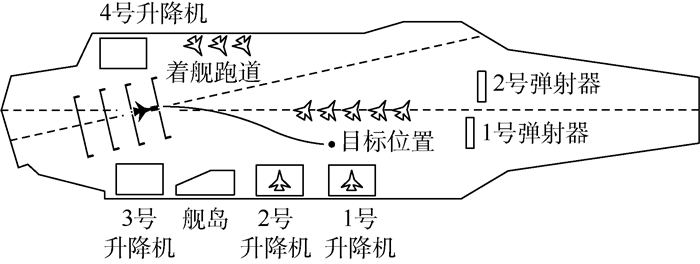
A carrier aircraft moves on a carrier flight deck which has the characteristics of heavy workloads and multiple obstacles. In order to reduce energy consumption of the carrier aircraft and improve service life of the aircraft engine, the carrier aircraft is usually dragged by a tractor on the flight deck, and both of them form a traction system. In order to make the traction system can safely and efficiently complete travel missions, a method is proposed for path planning of the traction system on the flight deck. Mathematic models of path planning are established, which include kinematics models and maneuverability constraints of the traction system, a mission objective function and mission constraints models, and obstacle avoidance models. According to the above models, a method to search the optimal path is designed based on geometry theory and Dijkstra's algorithm. Taking a Nimitz class carrier as an example, a path of the traction system on the flight deck is planned and tracking control simulation is carried out. The simulation results verify the reasonability of the models and the effectiveness of the method.
| [1] |
刘相春, 卢晶, 黄祥钊.国外航母舰载机出动回收能力指标体系分析[J].中国舰船研究, 2011, 6(4):1-7. doi: 10.3969/j.issn.1673-3185.2011.04.001
LIU X C, LU J, HUANG X Z.Analysis on the index system of sortie generation capacity of embarked aircrafts[J].Chinese Journal of Ship Research, 2011, 6(4):1-7(in Chinese). doi: 10.3969/j.issn.1673-3185.2011.04.001
|
| [2] |
MICHINI B, HOW J P.A human-interactive course of action planner for aircraft carrier deck operations[C]//Proceedings of AIAA Information Technology.Reston: AIAA, 2011: 1515. doi: 10.2514/6.2011-1515
|
| [3] |
ZHANG Z, LIN S L, DONG R, et al.Designing a human-computer cooperation decision planning system for aircraft carrier deck scheduling[C]//Proceedings of AIAA Information Technology.Reston: AIAA, 2015: 1111. doi: 10.2514/6.2015-1111
|
| [4] |
WU Y, SUN L G, QU X J.A sequencing model for a team of aircraft landing on the carrier[J].Aerospace Science and Technology, 2016, 54(1):72-87.
|
| [5] |
WU Y, QU X J.Path planning for taxi of carrier aircraft launching[J].Science China Technological Sciences, 2013, 56(6):1561-1570. doi: 10.1007/s11431-013-5222-5
|
| [6] |
WU Y, QU X J.Obstacle avoidance and path planning for carrier aircraft launching[J].Chinese Journal of Aeronautics, 2015, 28(3):1-10.
|
| [7] |
ZHENG Y, ZHANG Z, XIA G H.Complex-shaped object path planning algorithm with kinematics and terminal pose constraints[C]//27th Chinese Control and Decision Conference.Piscataway, NJ: IEEE Press, 2015: 3408-3412.
|
| [8] |
刘洋, 章卫国, 李广文, 等.动态环境中的无人机路径规划方法[J].北京航空航天大学学报, 2014, 40(2):252-256.
LIU Y, ZHANG W G, LI G W, et al.Path planning of UAV in dynamic environment[J].Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(2):252-256(in Chinese).
|
| [9] |
ZHU W R, DUAN H B.Chaotic predator-prey biogeography-based optimization approach for UCAV path planning[J].Aerospace Science and Technology, 2014, 32(1):153-161. doi: 10.1016/j.ast.2013.11.003
|
| [10] |
XU C F, DUAN H B, LIU F.Chaotic artificial bee colony approach to uninhabited combat air vehicle(UCAV) path planning[J].Aerospace Science and Technology 2010, 14(8):535-541. doi: 10.1016/j.ast.2010.04.008
|
| [11] |
韩维, 司维超, 丁大春, 等.基于聚类PSO算法的舰载机舰面多路径动态规划[J].北京航空航天大学学报, 2013, 39(5):610-614.
HAN W, SI W C, DING D C, et al.Multi-routes dynamic planning on deck of carrier plane based on clustering PSO[J].Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(5):610-614(in Chinese).
|
| [12] |
林圣琳.舰载机甲板作业辅助规划系统设计与实现[D].哈尔滨: 哈尔滨工程大学, 2014: 12-31.
LIN S L.Designing and Realizing an auxiliary planning system for aircraft scheduling on deck[D].Harbin: Harbin Engineering University, 2014: 12-31(in Chinese).
|
| [13] |
BLACKMORE L, ONO M, WILLIAMS B C.Chance-constrained optimal path planning with obstacles[J].IEEE Transactions on Robotics, 2011, 27(6):1080-1094. doi: 10.1109/TRO.2011.2161160
|
| [14] |
MUROTA K, SHIOURA A.Dijkstra's algorithm and L-concave function maximization[J].Mathematical Programming, 2014, 145(1-2):163-177. doi: 10.1007/s10107-013-0643-2
|
| [15] |
GUNKEL C, STEPPER A, MULLER A C, et al.Micro crack detection with Dijkstra's shortest path algorithm[J].Machine Vision and Applications, 2012, 23(3):589-601. doi: 10.1007/s00138-011-0324-1
|
| [16] |
QIN S J, BADGWELL T A.A survey of industrial model predictive control technology[J].Control Engineering Practice, 2003, 11(7):733-764. doi: 10.1016/S0967-0661(02)00186-7
|
| [17] |
MAYNE D Q, RAWLINGS J B, RAO C V, et al.Constrained model predictive control:Stability and optimality[J].Automatica, 2000, 36(6):789-814. doi: 10.1016/S0005-1098(99)00214-9
|
| [18] |
KOURO S, CORTES P, VARGAS R, et al.Model predictive control-A simple and powerful method to control power converters[J].IEEE Transactions on Industrial Electronics, 2009, 56(6):1826-1838. doi: 10.1109/TIE.2008.2008349
|
| [1] | ZHANG J,HUANG M H,WANG Y L,et al. Trajectory tracking for aircraft tug based on MPC[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(9):2916-2926 (in Chinese). doi: 10.13700/j.bh.1001-5965.2023.0431. |
| [2] | WANG H Y,GUO Y P. Autonomous path planning of departing aircraft in terminal area[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(2):446-456 (in Chinese). doi: 10.13700/j.bh.1001-5965.2023.0065. |
| [3] | JIANG Y,ZHANG S M,CHEN M Y,et al. Dual-phase scheduling of apron support vehicles considering multi-vehicle coordination[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(6):1926-1934 (in Chinese). doi: 10.13700/j.bh.1001-5965.2023.0405. |
| [4] | XING N,DI H T,YIN W J,et al. Path planning for agents based on adaptive polymorphic ant colony optimization[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(7):2330-2337 (in Chinese). doi: 10.13700/j.bh.1001-5965.2023.0432. |
| [5] | GUO F,HAN W,LIU Y J,et al. Time uncertainty analysis on cyclic operation procedures of carrier aircraft based on MC-GERT[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(3):795-805 (in Chinese). doi: 10.13700/j.bh.1001-5965.2023.0129. |
| [6] | TAN J F,XING X B,CUI Z,et al. Investigation on aerodynamics of a helicopter approaching an active control deck[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(7):2206-2217 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0615. |
| [7] | GONG H,NI C,WANG P,et al. A smooth path planning method based on Dijkstra algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(2):535-541 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0377. |
| [8] | LI K N,YANG K Q,GUO Y P,et al. Multi-aircraft path game coordination for autonomous operation mode[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(12):3747-3758 (in Chinese). doi: 10.13700/j.bh.1001-5965.2024.0038. |
| [9] | LIU Y J,HAN W,SU X C,et al. Carrier aircraft landing scheduling problem based on improved gray wolf optimization[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(3):803-813 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0280. |
| [10] | WANG R,LI J M,SHI Y L,et al. Vision-based path planning algorithm of unmanned bird-repelling vehicles in airports[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(5):1446-1453 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0717. |
| [11] | XIE Fan-wei, WANG Xu-gang, GU Zhen-zhen. Multi-stage Trajectory Planning Method for Uncertain Hazard Zone Avoidance based on Neural Networks[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0521 |
| [12] | SONG E B,YAO Y P. Method of improving tracking precision of planning path for impact rollers[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(1):106-114 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0495. |
| [13] | ZHAI J Q,YANG X X,DENG X L,et al. Global path planning of stratospheric aerostat in uncertain wind field[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(5):1116-1126 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0380. |
| [14] | QU Y,WANG S,ZENG L C,et al. Path planning algorithm for airborne pseudolites installed on stratospheric airships[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(5):1071-1082 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0385. |
| [15] | ZHAO M,LU H,WANG S Q,et al. A multimodal multi-objective path planning algorithm based on multi-swarm cooperative learning[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(3):606-616 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0274. |
| [16] | BIE T,ZHU X Q,FU Y,et al. Safety priority path planning method based on Safe-PPO algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(8):2108-2118 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0580. |
| [17] | CUI K K,HAN W,LIU Y J,et al. Automatic wave-off control algorithm for carrier aircraft based on DM-DSC[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(4):900-912 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0362. |
| [18] | CHI Shengkai, XIE Yongfang, CHEN Xiaofang, PENG Fan. Obstacle avoidance method of mobile robot based on obstacle cost potential field[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(11): 2289-2303. doi: 10.13700/j.bh.1001-5965.2021.0095 |
| [19] | Yue Ronggang, Wang Shaoping. Path planning of a climbing robot using mixed integer linear programming[J]. Journal of Beijing University of Aeronautics and Astronautics, 2013, (6): 792-797. |
| [20] | Hong Ye, Fang Jiancheng. Hierarchical Markov decision processes based path planning for UAV in three-dimensional environment[J]. Journal of Beijing University of Aeronautics and Astronautics, 2009, 35(1): 100-103. |
| 1. | 孙家玮,余明晖,杨大鹏,汤皓泉,卞大鹏. 基于CL-RRT与MPC的舰载机牵引系统路径规划. 系统工程与电子技术. 2024(05): 1745-1755 .  | |
| 2. | 韩维,刘子玄,苏析超,崔凯凯,刘洁. 结合启发式与最优控制的舰载机甲板路径规划算法. 系统工程与电子技术. 2023(04): 1098-1110 . | |
| 3. | Xin-wei Wang,Hai-jun Peng,Jie Liu,Xian-zhou Dong,Xu-dong Zhao,Chen Lu. Optimal control based coordinated taxiing path planning and tracking for multiple carrier aircraft on flight deck. Defence Technology. 2022(02): 238-248 . | |
| 4. | Jie LIU,Xianzhou DONG,Xinwei WANG,Kaikai CUI,Xiwang QIE,Jun JIA. A homogenization-planning-tracking method to solve cooperative autonomous motion control for heterogeneous carrier dispatch systems. Chinese Journal of Aeronautics. 2022(09): 293-305 . | |
| 5. | 王云翔,范加利,丁飞,曹建平. 多机移动条件下飞行甲板路径规划研究. 舰船电子工程. 2021(02): 55-59 . | |
| 6. | 王云翔,王海东,杨茂胜,范加利. 基于碰撞检测的舰载机甲板转运路径优化. 指挥控制与仿真. 2020(01): 58-63 . | |
| 7. | 戚基艳,金嘉琦,付景顺. 分布式驱动舰载机无杆式牵引车的驱动防滑. 兵器装备工程学报. 2020(09): 210-214 . | |
| 8. | 戚基艳,金嘉琦,付景顺. 舰载机无杆式牵引车横摆稳定性控制. 上海交通大学学报. 2020(09): 943-952 . | |
| 9. | Xinwei WANG,Jie LIU,Xichao SU,Haijun PENG,Xudong ZHAO,Chen LU. A review on carrier aircraft dispatch path planning and control on deck. Chinese Journal of Aeronautics. 2020(12): 3039-3057 . | |
| 10. | 贺少华,颜世伟,许景伟. 飞行甲板多机滑行路径规划. 海军航空工程学院学报. 2019(01): 126-132 . |

Figures(15) / Tables(3)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

ZHANG Jing, WU Yu, QU Xiangjuet al. Path planning method for traction system on carrier aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(10): 2125-2133. doi: 10.13700/j.bh.1001-5965.2017.0787(in Chinese)





 DownLoad:
DownLoad: