| Citation: | ZHANG Chendong, WANG Zhaorui, JIN Shengzhen, et al. High-precision positioning method based on SINS/RFID for trains in tunnel[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(4): 632-638. doi: 10.13700/j.bh.1001-5965.2020.0647(in Chinese)

|
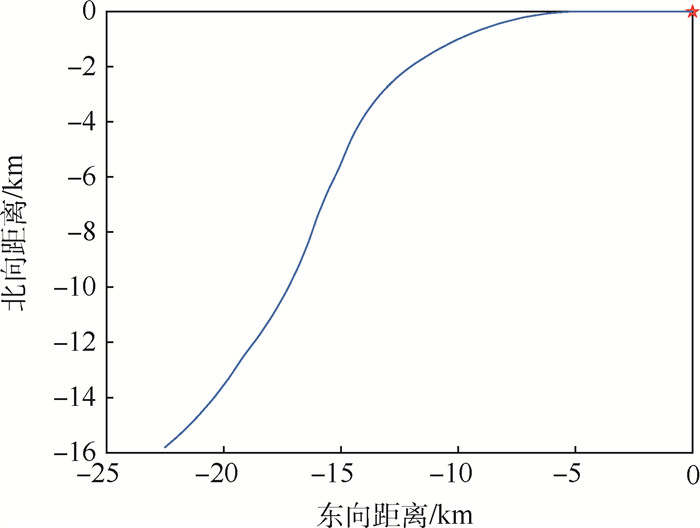
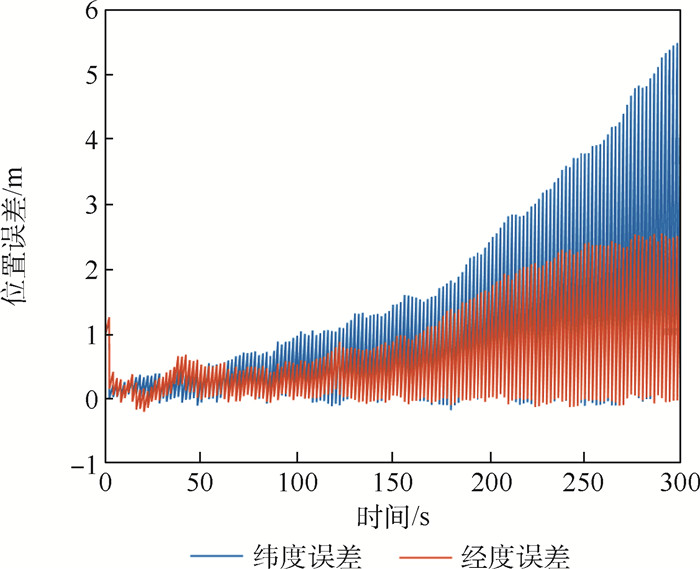
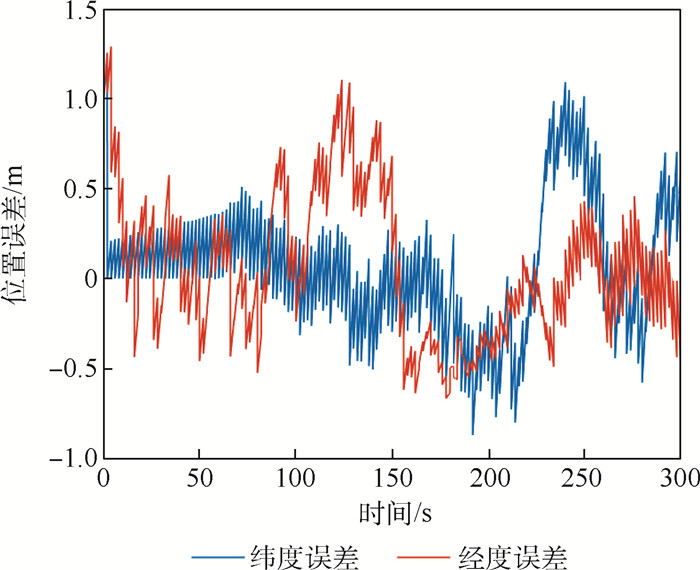
based on strapdown inertial navigation system (SINS) and radio frequency identification (RFID), an integrated positioning method is proposed for the position acquisition of high-speed trains in satellite-denied environment such as tunnels. The positioning accuracy of RFID tags is calculated by the response time model. The tags could also calibrate the attitude by adding actual railway information. Setting RFID tags on tunnel wall and at the same time combining with inertial navigation system provide continuous dynamic positioning data. Simulation results show that utilizing RFID tags in position calibration significantly decreases the error accumulation of inertial navigation system and increases positioning accuracy in 30 km tunnel. After the addition of attitude information, the positioning accuracy of the whole tunnel railway maintains at the level of meters in a variety of combinations of gyroscope performance and RFID tag interval, the best of which is 0.5 m.
| [1] |
上官伟, 王韦舒, 张路, 等. 北斗导航RAIM技术在列车定位的应用研究[J]. 铁道学报, 2018, 40(2): 73-81. doi: 10.3969/j.issn.1001-8360.2018.02.011
SHANGGUAN W, WANG W S, ZHANG L, et al. Application of BDS-based RAIM technology in train positioning[J]. Journal of the China Railway Society, 2018, 40(2): 73-81(in Chinese). doi: 10.3969/j.issn.1001-8360.2018.02.011
|
| [2] |
WANG D S, LU Y J, ZHANG L, et al. Intelligent positioning for a commercial mobile platform in seamless indoor/outdoor scenes based on multi-sensor fusion[J]. Sensors, 2019, 19(7): 1696. doi: 10.3390/s19071696
|
| [3] |
王晓薇. 基于WIFI的隧道人员定位算法的分析与研究[D]. 武汉: 武汉邮电科学研究院, 2017: 18-24.
WANG X W. Analysis and research of tunnel personnel location algorithm based on WIFI[D]. Wuhan: Wuhan Research Institute of Posts and Telecommunications, 2017: 18-24(in Chinese).
|
| [4] |
黄文轩. 在GPS不完备条件下RFID列车定位研究[J]. 铁路通信信号工程技术, 2018, 15(1): 25-29.
HUANG W X. Research on RFID train location under incomplete GPS[J]. Railway Signalling & Communication Engineering, 2018, 15(1): 25-29(in Chinese).
|
| [5] |
陈伟. 卫星遮挡交通环境下车辆融合定位策略研究[D]. 南京: 东南大学, 2017: 81-97.
CHEN W. Research on fusion positioning strategy for land vehicles in satellite signal-blocked traffic environments[D]. Nanjing: Southeast University, 2017: 81-97(in Chinese).
|
| [6] |
PEREIRA F L. Positioning systems for underground tunnel environments[D]. Portugal: Faculdade de Engenharia da Universidade do Porto, 2016: 79-115.
|
| [7] |
方旺盛, 高银. 狭长直隧道环境中WSN的RSSI加权质心定位算法[J]. 传感技术学报, 2014, 27(2): 247-251. doi: 10.3969/j.issn.1004-1699.2014.02.019
FANG W S, GAO Y. A weighted centroid localization algorithm based on RSSI for wireless sensor network in straight narrow tunnel[J]. Chinese Journal of Sensors and Actuators, 2014, 27(2): 247-251(in Chinese). doi: 10.3969/j.issn.1004-1699.2014.02.019
|
| [8] |
SONG X, LI X, TANG W C, et al. A hybrid positioning strategy for vehicles in a tunnel based on RFID and in-vehicle sensors[J]. Sensors, 2014, 14(12): 23095-23118. doi: 10.3390/s141223095
|
| [9] |
KO H, SHIM Y, KONG S H. Realization and demonstration of enhanced Korean high-speed train navigation system with noise filtering schemes[J]. International Journal of Control Automation and Systems, 2018, 16(9): 769-781.
|
| [10] |
CUI L, ZHANG Z H, GAO N, et al. Radio frequency identification and sensing techniques and their applications-A review of the state-of-the-art[J]. Sensors, 2019, 19(18): 4012. doi: 10.3390/s19184012
|
| [11] |
彭国旗. 基于RFID的车辆定位技术研究[D]. 长春: 长春理工大学, 2018: 7-18.
PENG G Q. Research on vehicle positioning technology based on RFID[D]. Changchun: Changchun University of Science and Technology, 2018: 7-18(in Chinese).
|
| [12] |
ZHAO Y, LIU K H, MA Y T, et al. Similarity analysis based indoor localization algorithm with backscatter information of passive UHF RFID tags[J]. IEEE Sensors Journal, 2017, 17(1): 185-193. doi: 10.1109/JSEN.2016.2624314
|
| [13] |
MATBOULY H, ZANNAS K, DUROC Y, et al. Analysis and assessments of time delay constrains for passive RFID tag-sensor communication link: Application for rotation speed sensing[J]. IEEE Sensors Journal, 2017, 17(7): 2174-2181. doi: 10.1109/JSEN.2017.2662058
|
| [14] |
严恭敏, 邓瑀. 传统组合导航中的实用Kalman滤波技术评述[J]. 导航定位与授时, 2020, 7(2): 50-64.
YAN G M, DENG Y. Review on practical Kalman filtering techniques in traditional integrated navigation system[J]. Navigation Positioning & Timing, 2020, 7(2): 50-64(in Chinese).
|
| [15] |
严恭敏, 翁浚. 捷联惯导算法与组合导航原理[M]. 西安: 西北工业大学出版社, 2019: 78-105.
YAN G M, WENG J. Strapdown inertial navigation algorithm and principle of integrated navigation[M]. Xi'an: Northwestern Polytechnical University Press, 2019: 78-105(in Chinese).
|
| [16] |
SAVAGE P G. Strapdown inertial navigation integration algorithm design Part 1: Attitude algorithms[J]. Journal of Guidance, Control, and Dynamics, 1998, 21(1): 19-28.
|
| [17] |
秦永元, 张洪钺, 王叔华. 卡尔曼滤波与组合导航原理[M]. 2版. 西安: 西北工业大学出版社, 2012: 5-67.
QIN Y Y, ZHANG H Y, WANG S H. Kalman filtering and principle of integrated navigation[M]. 2nd ed. Xi'an: Northwestern Polytechnical University Press, 2012: 5-67(in Chinese).
|
| [1] | GUO Jiangtao, SUN Rui, CHEN Hanzhi, LIU Enhong, SHANG Xiaotong. The GNSS/IMU/BA Integrated Navigation Algorithm for Drones Assisted by Collaborative Factors[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2025.0167 |
| [2] | GUO Shiluo, CHANG Limin, TANG Rui, LI Dong, LI Feng. Adaptive robust CKF and its application in SINS dynamic alignment[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0765 |
| [3] | DENG C J,CHEN Q J,ZHANG T S,et al. NHC lever arm estimation algorithm for vehicle-integrated navigation systems based on dead reckoning[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(2):668-675 (in Chinese). doi: 10.13700/j.bh.1001-5965.2023.0035. |
| [4] | SHENG Qi, SUN Rui, HE Yulin, ZHANG Hengyu. A robust adaptive positioning algorithm for GNSS/IMU based on 3D grid error modeling[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0169 |
| [5] | QIN H L,WU N,ZHAO C. Differential positioning with Doppler measurements from Iridium satellite signals of opportunity based on lines of sight correction[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(3):748-756 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0378. |
| [6] | XU G Z,LIU G F,KUANG W,et al. Accurate license plate location based on synchronous vertex and body region detection[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(2):376-387 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0396. |
| [7] | ZHANG Dong-ping, FU Zhen-tao, WANG Zhu-tao, LIN Li-li, WEI Ming. FE-SELDnet:Sound event Localization and detection network with enhanced feature expression[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0019 |
| [8] | QIN Hong-lei, DENG Ruo-fan, LU: Hong-li. Single-station TLE estimation of NC-LEO satellite for space-based opportunistic positioning[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0684 |
| [9] | WANG B,LI Y W,WANG K. Design of a low cost chipless RFID humidity sensor[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(3):1047-1052 (in Chinese). doi: 10.13700/j.bh.1001-5965.2023.0161. |
| [10] | WANG Haipeng, LIU Haina, WANG Zhendong, MOU Cunxiao, ZHANG He, YE Wen. Pod integrated navigation system elastic lever arm error compensation method[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0155 |
| [11] | ZHANG Wen-ke, HAN Peng, FENG Yu, GAO Dong. Visual-inertial integrated navigation method based on semantic segmentation and geometric constraints in dynamic environment[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0016 |
| [12] | LI C X,LI T Y,LI Z Z,et al. Intelligent algorithm of warship’s vital parts detection, trajectory prediction and pose estimation[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(2):444-456 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0253. |
| [13] | TAN Chuan-rui, LI Tang, CHEN Wen-qian, WANG Feng, YANG Dong-kai, WU Shi-yu. Evaluation of TDOA Based Air Target Localization Algorithm Using GNSS-Based Passive Radar[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0685 |
| [14] | MENG G,HUANG H,WU W G,et al. Parasitic rotation of large stroke compliant micro-positioning platform[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(3):665-673 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0272. |
| [15] | CHEN H Z,SUN R,QIU M,et al. An adaptive noise variance based fault detection algorithm for GNSS positioning[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(2):406-421 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0222. |
| [16] | LI L,FU M H,ZHANG T,et al. A workpiece location algorithm based on improved SSD[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(6):1260-1269 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0442. |
| [17] | LIU F,WANG Z,DAI Y Y,et al. A robust adaptive filtering algorithm based on predicted residuals in integrated navigation[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(6):1301-1310 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0460. |
| [18] | JIN K D,CHAI H Z,SU C H,et al. Fading memory variational Bayesian adaptive filter based on variable attenuating factor[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(11):2989-2999 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0799. |
| [19] | ZENG Sheng, ZHU Fengchao, YANG Jian. A new RF fingerprint identification method based on preamble of signal[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(12): 2566-2575. doi: 10.13700/j.bh.1001-5965.2021.0164 |
| [20] | Cao Juanjuan, Fang Jiancheng, Sheng Wei. Fast data fusion method for integrated navigation system and hardware in loop simulation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2006, 32(11): 1281-1285. |


Figures(5) / Tables(4)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

ZHANG Chendong, WANG Zhaorui, JIN Shengzhen, et al. High-precision positioning method based on SINS/RFID for trains in tunnel[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(4): 632-638. doi: 10.13700/j.bh.1001-5965.2020.0647(in Chinese)





 DownLoad:
DownLoad: