| Citation: | GAO Jiaying, HE Qiuyang, ZHAN Zhixinet al. Design of neural network controller for a billiard robot[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(3): 533-543. doi: 10.13700/j.bh.1001-5965.2016.0183(in Chinese)

|
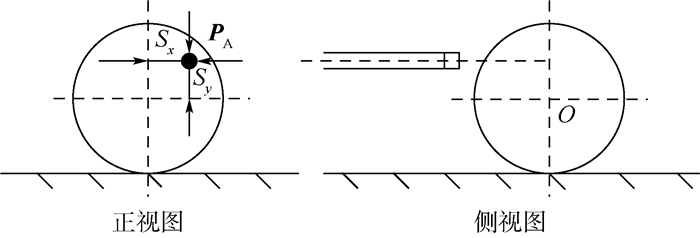
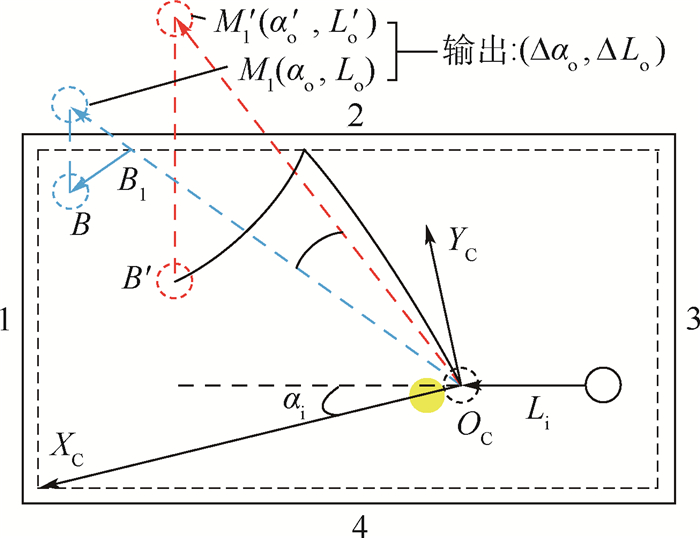
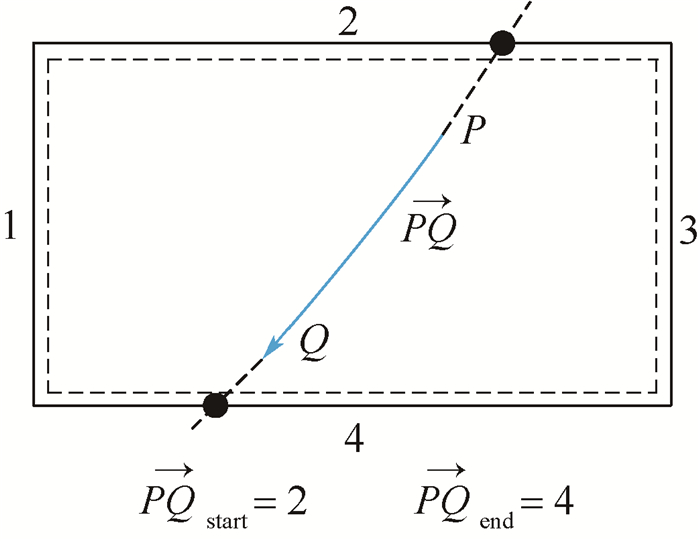
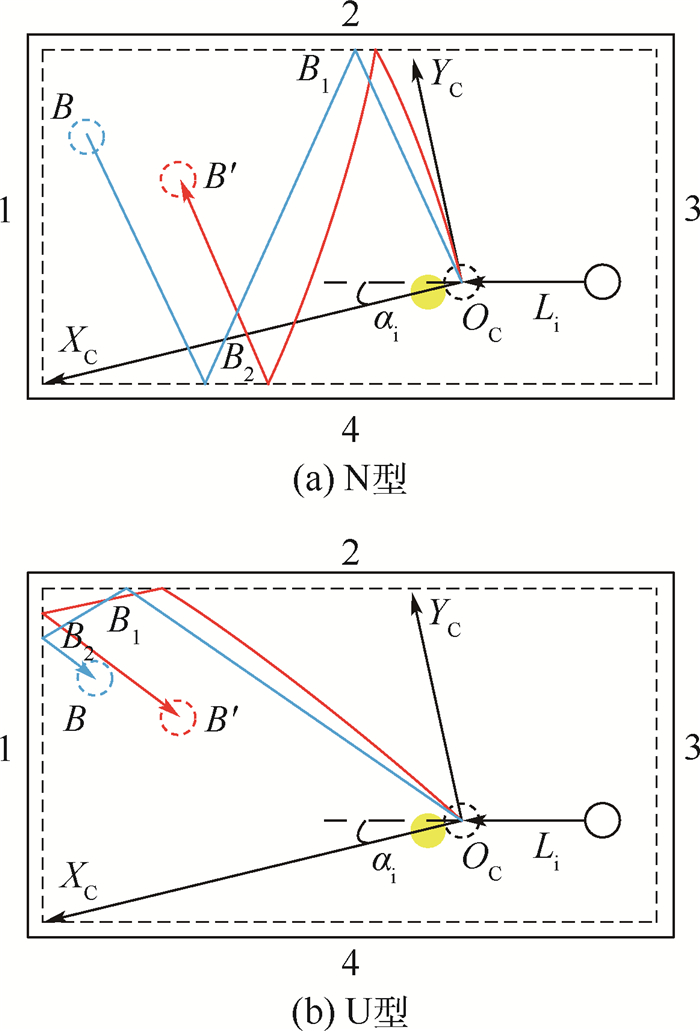
This paper focuses on the cue ball controlling problem for a billiard robot. A neural network (NN) controller is designed, and the trained robot is able to stroke the cue ball moving to the target point after colliding with objective ball and cushions. Since the problem is non-linear and non-smooth, the solution is divided into several steps. First, the stroking model and the coordinate definition are described. Second, the kinematic model for cue ball motion and the mirror model for cushion rebounds are established under the ideal smooth assumption. Then, the neural network method is used to modify the ideal models, and the pattern recognition method for trajectories is presented. In the verification test, the trained robot is able to master the cue ball controlling with each pattern. The statistic results tally with the model analysis. Compared with simply adopting neural network method, the method combined with theoretical kinematic analysis will effectively improve the network quality and reduce the training error.

| [1] |
HO K H L, MARTIN T, BALDWIN J.Snooker robot player-20 years on[C]//IEEE Symposium on Computational Intelligence and Games, 2007.(CIG 2007).Piscataway, NJ:IEEE Press, 2007:1-8.
|
| [2] |
YANG J S, CHEN Y M.The design of jump shot decision-making system for a billiard robot[C]//2010 IEEE Conference on Robotics Automation and Mechatronics (RAM).Piscataway, NJ:IEEE Press, 2010:409-413.
|
| [3] |
CHENG B R, LI J T, YANG J S.Design of the neural-fuzzy compensator for a billiard robot[C]//2004 IEEE International Conference on Networking, Sensing and Control.Piscataway, NJ:IEEE Press, 2004:909-913.
|
| [4] |
LEGG P A, PARRY M L, CHUNG D H S, et al.Intelligent filtering by semantic importance for single-view 3D reconstruction from Snooker video[C]//IEEE International Conference on Image Processing.Piscataway, NJ:IEEE Press, 2011:2385-2388.
|
| [5] |
LECKIE W, GREENSPAN M A.Pool physics simulation by event prediction 1:Motion transitions[J].ICGA Journal, 2005, 28(4):214-222. https://core.ac.uk/display/24665996
|
| [6] |
LANDRY J F, DUSSAULT J P, MAHEY P.A heuristic-based planner and improved controller for a two-layered approach for the game of billiards[J].IEEE Transactions on Computational Intelligence & AI in Games, 2013, 5(4):325-336. https://www.researchgate.net/publication/260711338_A_Heuristic-Based_Planner_and_Improved_Controller_for_a_Two-Layered_Approach_for_the_Game_of_Billiards
|
| [7] |
DOMÉNECH A.Non-smooth modelling of billiard-and superbilliard-ball collisions[J].International Journal of Mechanical Sciences, 2008, 50(4):752-763. doi: 10.1016/j.ijmecsci.2007.11.006
|
| [8] |
MATHAVAN S, JACKSON M R, PARKIN R M.Numerical simulations of the frictional collisions of solid balls on a rough surface[J].Sports Engineering, 2014, 17(4):227-237. doi: 10.1007/s12283-014-0158-y
|
| [9] |
MATHAVAN S, PARKIN R M, JACKSON M R.A theoretical analysis of billiard ball dynamics under cushion impacts[J].Proceedings of the Institution of Mechanical Engineers, Part C:Journal of Mechanical Engineering Science, 2010, 224(9):1863-1873. doi: 10.1243/09544062JMES1964
|
| [10] |
GAO J, HE Q, ZHAN Z, et al.Dynamic modeling based on fuzzy neural network for a billiard robot[C]//IEEE International Conference on Networking, Sensing and Control.Piscataway, NJ:IEEE Press, 2016:1-4.
|
| [11] |
ZUO Z, WANG C.Adaptive trajectory tracking control of output constrained multi-rotors systems[J].IET Control Theory & Applications, 2014, 8(13):1163-1174. http://ieeexplore.ieee.org/document/6882893/
|
| [12] |
LOU W, GUO X.Adaptive trajectory tracking control using reinforcement learning for quadrotor[J/OL].International Journal of Advanced Robotic Systems, 2016, 13(38).[2016-03-09].http://cdn.intechopen.com/pdfs-wm/49981.pdf.DOI:105772/62128.
|
| [13] |
LECKIE W, GREENSPAN M A.Pool physics simulation by event prediction 2:Collisions[J].ICGA Journal, 2006, 29(1):24-31. https://www.researchgate.net/publication/220174447_Pool_Physics_Simulation_by_Event_Prediction_2_Collisions
|

Figures(17) / Tables(5)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: