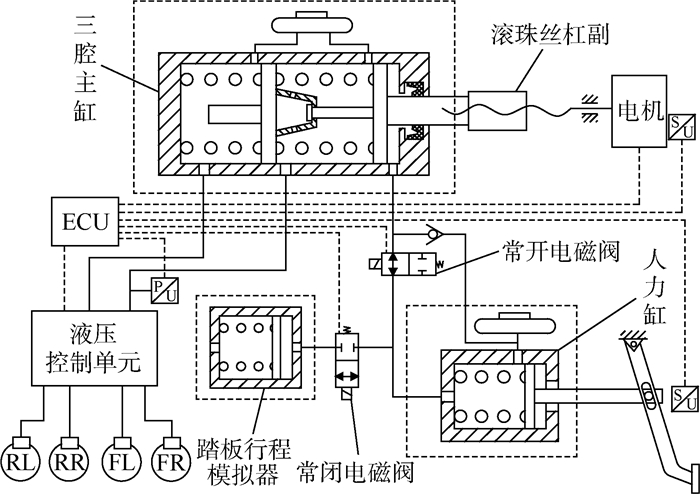
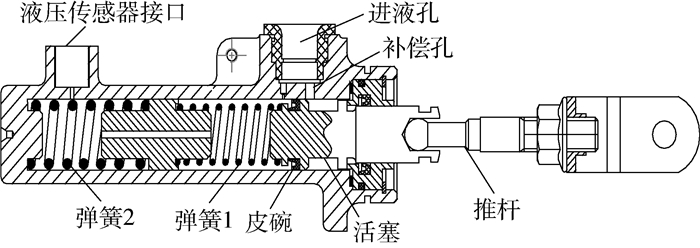
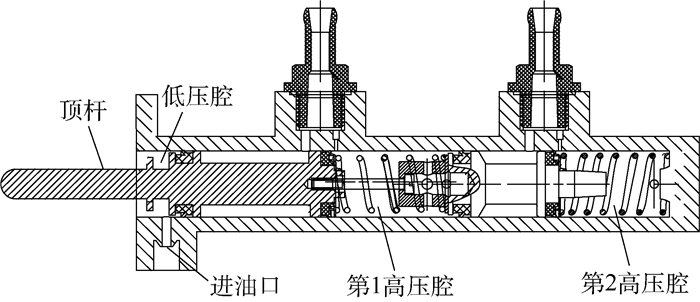
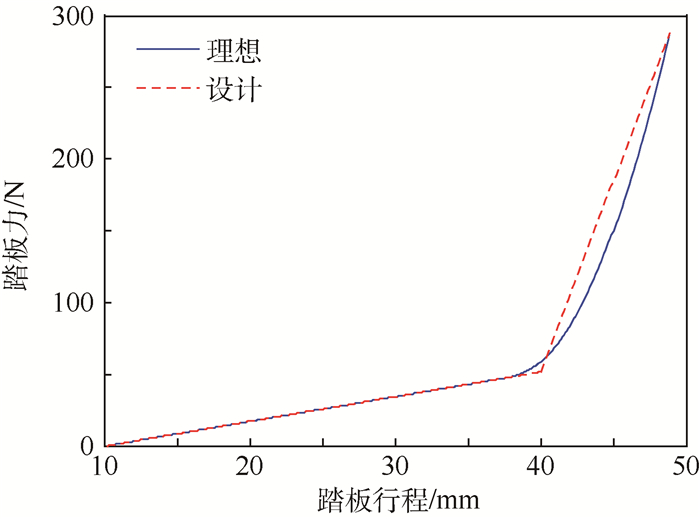
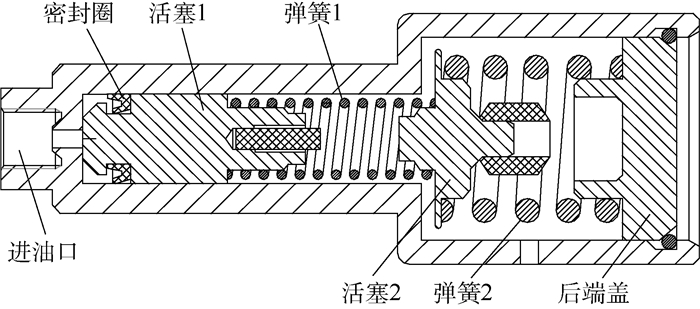
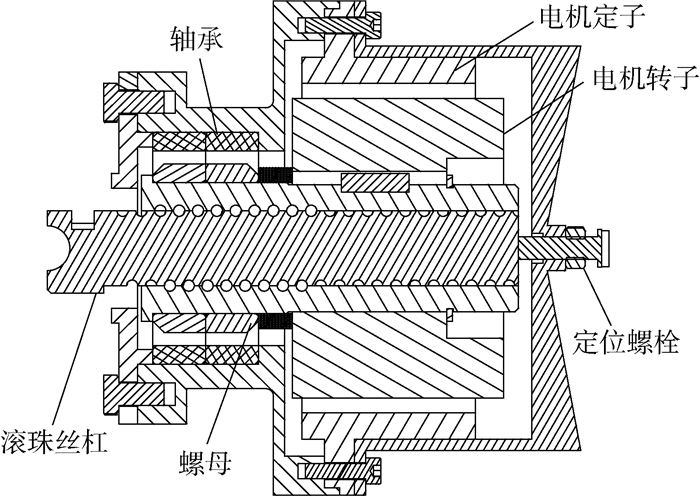
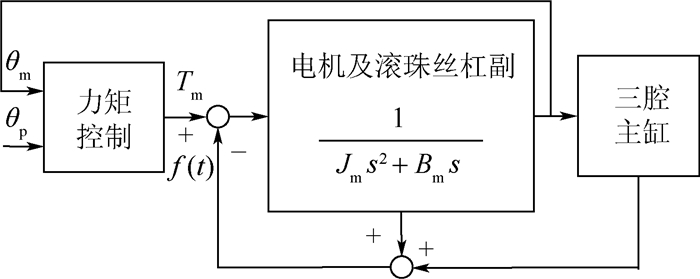
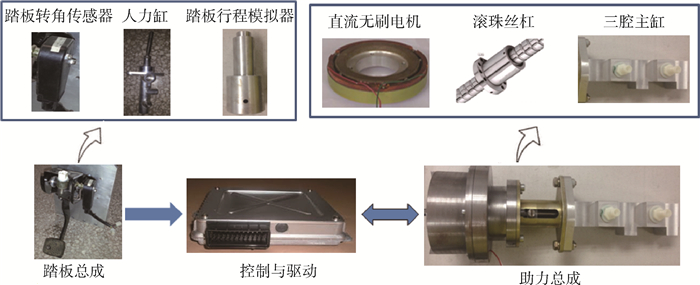
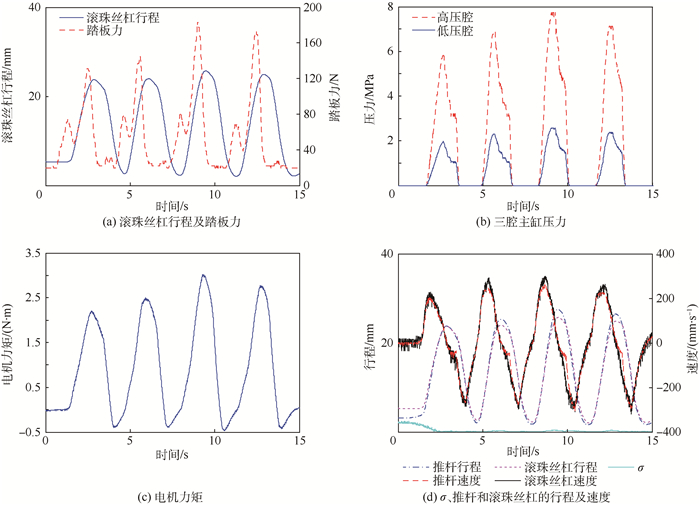
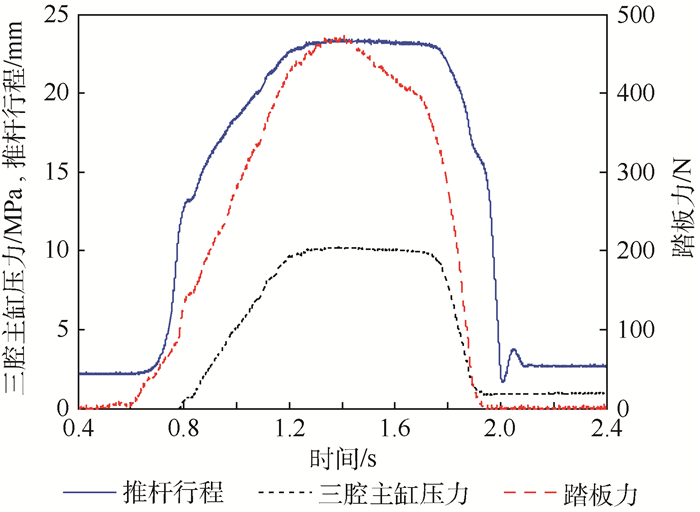
Because the conventional vacuum booster brake systems cannot be applied to electric vehicles directly, an integrated electro-hydraulic brake (IEHB) system, which consists of a hollow brushless DC motor, a ball screw assembly, a 3-chamber master cylinder, a pedal cylinder and a pedal stroke simulator, was developed. The IEHB meets all the future requirements of electric vehicles and active safety technologies, such as electric brake booster, brake-by-wire, coordination with regenerative braking, etc. A sliding mode controller was proposed to improve brake booster performance of the system and Lyapunov function approach is used to ensure the controller robustness. The experimental results show that the proposed controller can control the motor to generate hydraulic pressure in the 3-chamber master cylinder quickly, and force the screw to follow with the push rod well to provide comfortable pedal feeling; the system can also realize brake-by-wire and manpower backup brake functions, and meet the requirements of the regulation; the pedal stroke simulator can generate smooth and continuous pedal feeling.



 Download (41288)
Download (41288) 
 Views
Views  Cited by
Cited by 


































































































 XML Online Production Platform
XML Online Production Platform
