| Citation: | CHEN Youdong, GUO Jiaxin, TAO Yonget al. Adaptive grasping strategy of robot based on Gaussian process[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(9): 1738-1745. doi: 10.13700/j.bh.1001-5965.2016.0660(in Chinese)

|
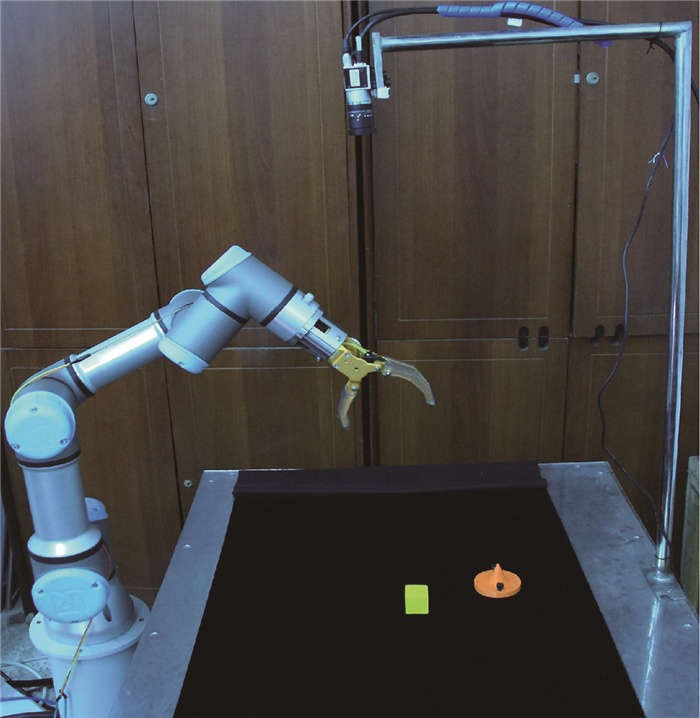
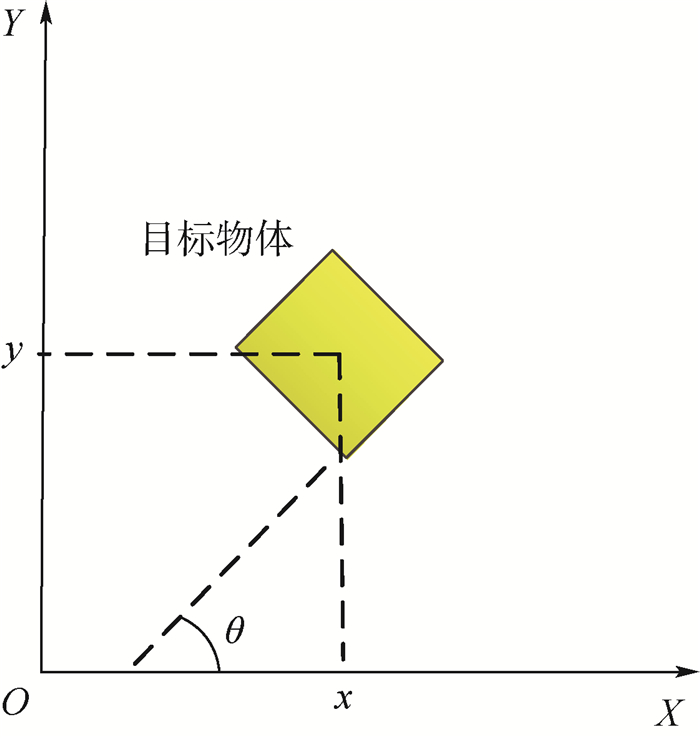
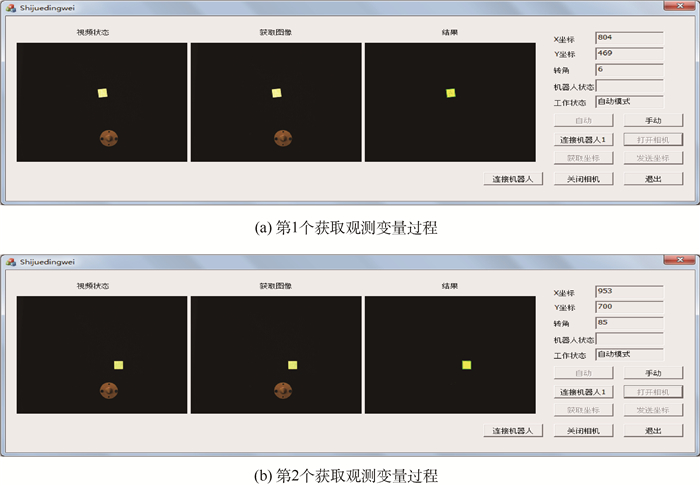
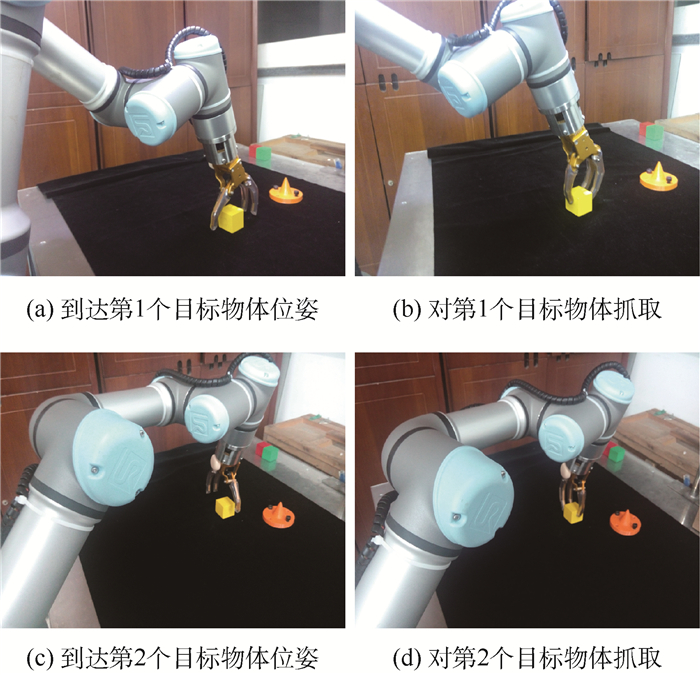
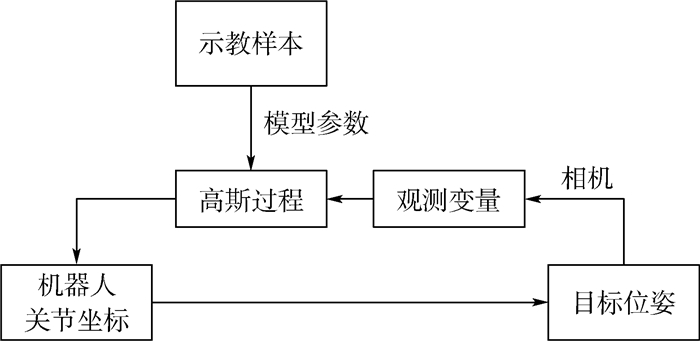
When robot grasps an object, the pose of the object maybe change frequently. In order to make the robot adapt to the change of the pose of the object in the process of motion, an adaptive grasping strategy of robot based on Gaussian process was proposed. The proposed method maps the observation variables to the joint angles, which makes robot learn from samples and eliminates the calibration process of robot vision system and the robot inverse kinematics computation. First, the robot was dragged to grasp object. The observation variables of object and corresponding robot joint angles were recorded. Second, Gaussian process model was trained with the recorded samples, which correlates the observation variables and joint angles. Finally, after new observation variables were acquired, joint angles for grasping operation can be obtained by the trained Gaussian process model. The experiments show that UR3 robot can successfully grasp objects after training.

| [1] |
AHRARY A, LUDENA R D A.A novel approach to design of an under-actuated mechanism for grasping in agriculture application[M]//LEE R.Applied computing and information technology.Berlin:Springer, 2014:31-45.
|
| [2] |
MANTI M, HASSAN T, PASSETTI G, et al.An under-actuated and adaptable soft robotic gripper[M]//PRESCOTT T J, LEPORA N F, MURA A, et al.Biomimetic and biohybrid systems.Berlin:Springer, 2015:64-74.
|
| [3] |
BELZILE B, BIRGLEN L.A compliant self-adaptive gripper with proprioceptive haptic feedback[J].Autonomous Robots, 2014, 36(1):79-91. doi: 10.1007%2Fs10514-013-9360-1.pdf
|
| [4] |
PETKOVIC'D, ISSA M, PAVLOVIC'N D, et al.Adaptive neuro fuzzy controller for adaptive compliant robotic gripper[J].Expert Systems with Applications, 2012, 39(18):13295-13304. doi: 10.1016/j.eswa.2012.05.072
|
| [5] |
HOFFMANN H, SCHENCK W, MÖLLER R.Learning visuomotor transformations for gaze-control and grasping[J].Biological Cybernetics, 2005, 93(2):119-130. doi: 10.1007/s00422-005-0575-x
|
| [6] |
SAXENA A, DRIEMEYER J, NG A Y.Robotic grasping of novel objects using vision[J].International Journal of Robotics Research, 2008, 27(2):157-173. doi: 10.1177/0278364907087172
|
| [7] |
LIPPIELLO V, RUGGIERO F, SICILIANO B, et al.Visual grasp planning for unknown objects using a multifingered robotic hand[J].IEEE/ASME Transactions on Mechatronics, 2013, 18(3):1050-1059. doi: 10.1109/TMECH.2012.2195500
|
| [8] |
ZHANG Z Y.A flexible new technique for camera calibration[J].IEEE Transactions on Pattern Analysis & Machine Intelligence, 2000, 22(11):1330-1334. http://www-users.cs.umn.edu/~hspark/CSci5980/zhang.pdf
|
| [9] |
王一, 刘常杰, 杨学友, 等.工业机器人视觉测量系统的在线校准技术[J].机器人, 2011, 33(3):299-302. http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201103009.htm
WANG Y, LIU C J, YANG X Y, et al.Online calibration of visual measurement system based on industrial robot[J].Robot, 2011, 33(3):299-302(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201103009.htm
|
| [10] |
张李俊, 黄学祥, 冯渭春, 等.基于运动路径靶标的空间机器人视觉标定方法[J].机器人, 2016, 38(2):193-199. http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201602009.htm
ZHANG L J, HUANG X X, FENG W C, et al.Space robot vision calibration with reference objects from motion trajectories[J].Robot, 2016, 38(2):193-199(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201602009.htm
|
| [11] |
CORKE P I.Visual control of robots:High-performance visual serving[M].New York:Wiley, 1997.
|
| [12] |
SIRADJUDDIN I, BEHERA L, MCGINNITY T M, et al.A position based visual tracking system for a 7 DOF robot manipulator using a kinect camera[C]//International Joint Conference on Neural Networks.Piscataway, NJ:IEEE Press, 2012:1-7. https://www.iitk.ac.in/ee/publications-stream-wise-list
|
| [13] |
THOMAS J, LOIANNO G, SREENATH K, et al.Toward image based visual servoing for aerial grasping and perching[C]//2014 IEEE International Conference on Robotics and Automation (ICRA).Piscataway, NJ:IEEE Press, 2014:2113-2118.
|
| [14] |
NIE L, HUANG Q.Inverse kinematics for 6-DOF manipulator by the method of sequential retrieval[C]//Proceedings of the International Conference on Mechanical Engineering and Material Science, 2012:255-258.
|
| [15] |
CHAN T F, DUBEY R V.A weighted least-norm solution based scheme for avoiding joint limits for redundant joint manipulators[J].IEEE Transactions on Robotics & Automation, 1995, 11(2):286-292. http://ieeexplore.ieee.org/document/370511/
|
| [16] |
SHIMIZU M, KAKUYA H, YOON W K, et al.Analytical inverse kinematic computation for 7-DOF redundant manipulators with joint limits and its application to redundancy resolution[J].IEEE Transactions on Robotics, 2008, 24(5):1131-1142. doi: 10.1109/TRO.2008.2003266
|
| [17] |
LUO R C, LIN T W, TSAI Y H.Analytical inverse kinematic solution for modularized 7-DoF redundant manipulators with offsets at shoulder and wrist[C]//International Conference on Intelligent Robots and Systems.Piscataway, NJ:IEEE Press, 2014:516-521.
|
| [18] |
EWERTON M, NEUMANN G, LIOUTIKOV R, et al.Learning multiple collaborative tasks with a mixture of interaction primitives[C]//2015 IEEE International Conference on Robotics and Automation (ICRA).Piscataway, NJ:IEEE Press, 2015:1535-1542.
|
| [19] |
RASMUSSEN C E.Gaussian processes for machine learning[M].Cambridge:MIT Press, 2006.
|
| [20] |
PARASCHOS A, DANIEL C, PETERS J, et al.Probabilistic movement primitives[C]//Advances in Neural Information Processing Systems(NIPS), 2013:2616-2624.
|
| [21] |
CALANDRA R, SEYFARTH A, PETERS J, et al.An experimental comparison of Bayesian optimization for bipedal locomotion[C]//IEEE International Conference on Robotics and Automation.Piscataway, NJ:IEEE Press, 2014:1951-1958.
|
| [22] |
CULLY A, CLUNE J, TARAPORE D, et al.Robots that can adapt like animals[J].Nature, 2015, 521(7553):503-507. doi: 10.1038/nature14422
|
Figures(10) / Tables(5)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: