| Citation: | WANG Siyuan, TANG Ling, WANG Yaobing, et al. Design and analysis of an integrated leg-arm quadruped robot[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(10): 2099-2108. doi: 10.13700/j.bh.1001-5965.2016.0810(in Chinese)

|
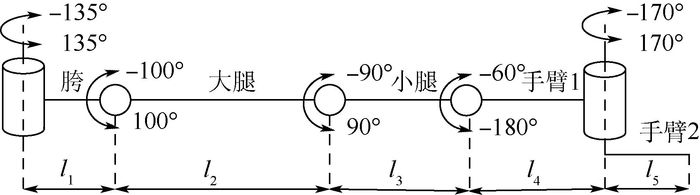
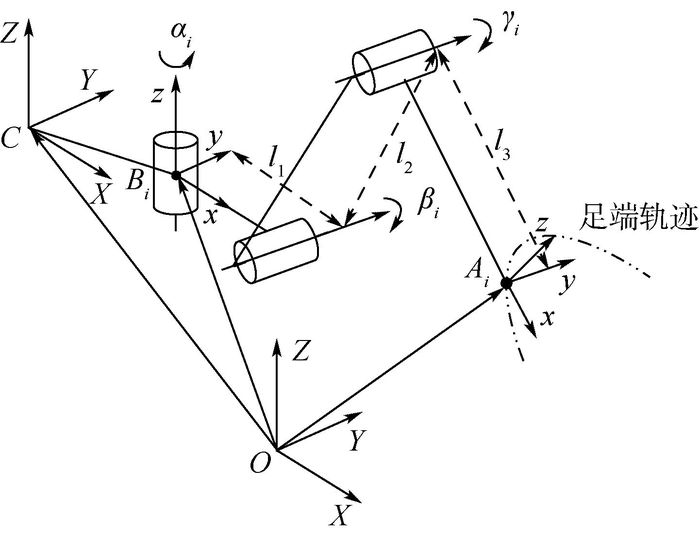
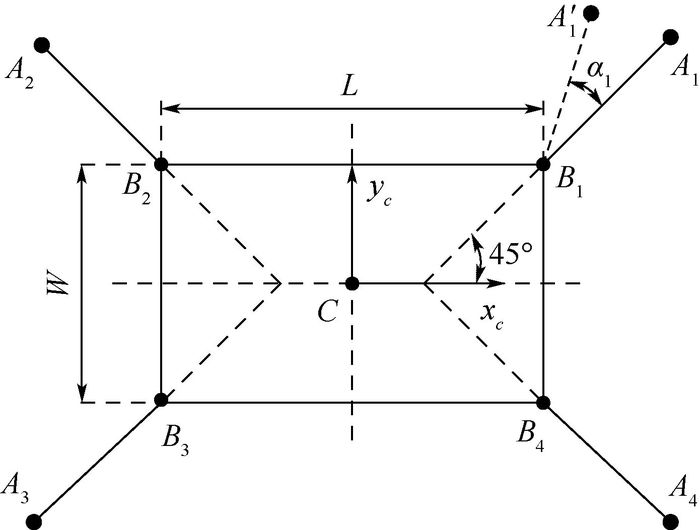
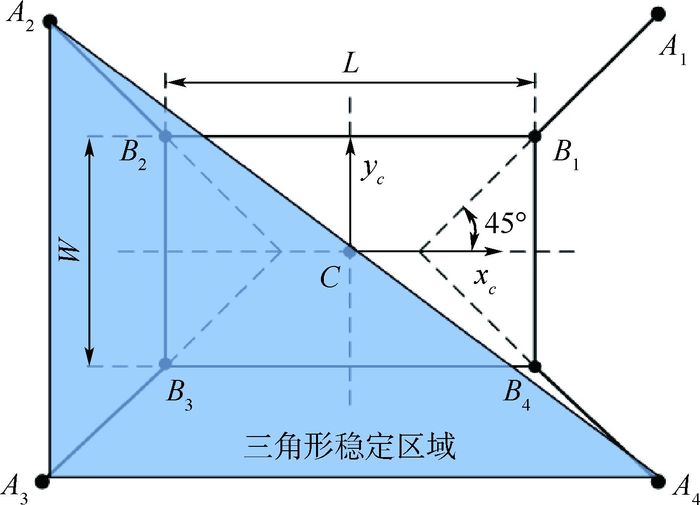
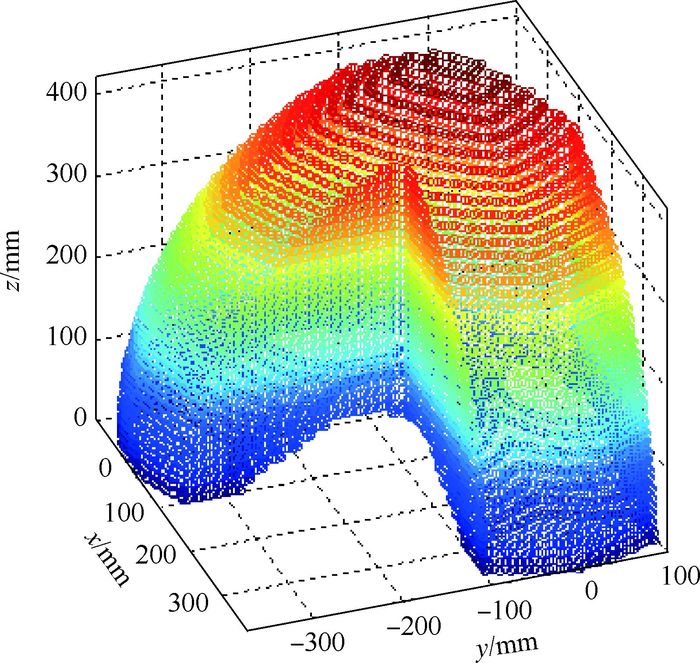
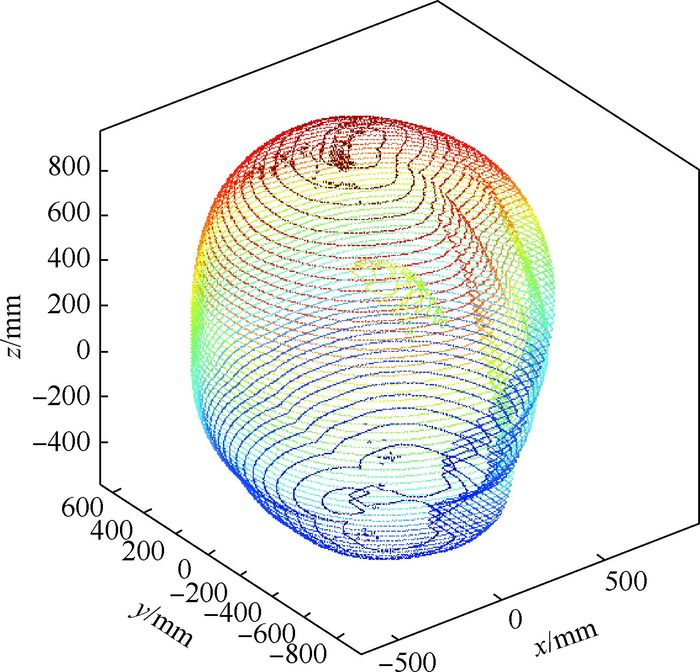
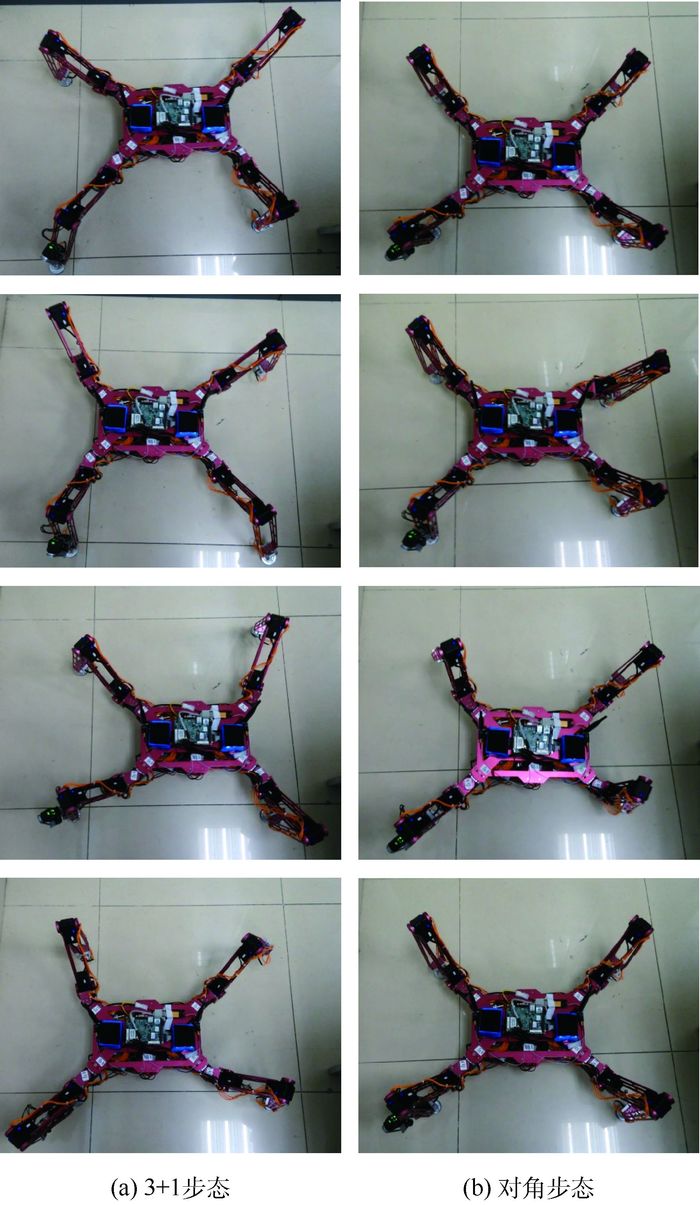
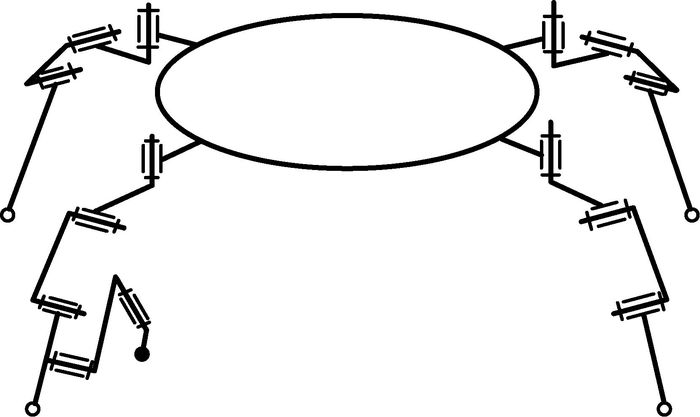
An integrated leg-arm quadruped robot with a function multiplexing limb is presented in this paper, and it can realize both walking and operating. The walking mode and the operating mode of the robot are studied. First, a positive kinematic model of a single leg is established and inverse kinematics of the robot is derived. Then the forward kinematic model of the 5-DOF function multiplexing limb is built, based on which an optimal inverse kinematics method either to satisfy position or gesture for insufficient DOF operation arm is offered. And position deviation and gesture deviation corresponding to each situation are given. The kinematic model of a hybrid serial-parallel mechanism composed of supporting ground, standing legs, body and operating arm is established. The body displacement can compensate the position deviation of the tip of manipulator to ensure the accuracy of manipulation. Finally, the workspace of body, operating arm and hybrid serial-parallel mechanism is simulated. The functions of walking and operating of the robot are verified experimentally.

| [1] |
HIROSE S.Three basic types of locomotions in mobile robots[C]//Proceedings of the 5th International Conference on Advanced Robotics 1991.Piscataway, NJ:IEEE Press, 1991, 1:12-17.
|
| [2] |
徐轶群, 万隆君.四足步行机器人腿机构及其稳定性步态控制[J].机械科学与技术, 2003, 22(1):86-91. http://www.cnki.com.cn/Article/CJFDTOTAL-JXKX200301027.htm
XU Y Q, WAN L J.Leg mechanism of a quadruped walking robot and its stability gait control[J].Mechanical Science and Technology for Aerospace Engineering, 2003, 22(1):86-91(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-JXKX200301027.htm
|
| [3] |
HIROSE S, KATO K.Study on quadruped walking robot in Tokyo institute of technology-past, present and future[C]//Proceedings of the 2000 IEEE International Conference on Robotics & Automation.Piscataway, NJ:IEEE Press, 2000, 1(7):414-419.
|
| [4] |
YAMAMOTO Y, YUN X.Coordinating locomotion and manipulation of a mobile manipulator[J].IEEE Transactions on Automatic Control, 1994, 39(6):1326-1332. doi: 10.1109/9.293207
|
| [5] |
KHATIB O, YOKOI K, CHANG K, et al.Vehicle/arm coordination and multiple mobile manipulator decentralized cooperation[C]//Proceedings of the 1996 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS 96).Piscataway, NJ:IEEE Press, 1996, 4-8:546-553.
|
| [6] |
ACKERMAN E.BigDog throws cinder blocks with huge robotic face-arm[EB/OL].[2013-03-01].http://spectrum.ieee.org/automaton/robotics/military-robots/bigdog-throws-cinder-blocks-with-huge-robotic-facearm.
|
| [7] |
ACKERMAN E.Boston dynamics’SpotMini is all electric, agile, and has a capable face-arm[EB/OL].[2016-06-23].http://spectrum.ieee.org/automaton/robotics/home-robots/boston-dynamics-spotmini.
|
| [8] |
KATO K, HIROSE S.Development of the quadruped walking robot, TITAN-IX-Mechanical design concept and application for the humanitarian demining robot[J].Advanced Robotics, 2001, 15(2):191-204. doi: 10.1163/15685530152116227
|
| [9] |
WILCOX B H.ATHLETE:A cargo and habitat transporter for the moon[C]//Proceedings of the 2009 IEEE Conference on Aerospace.Piscataway, NJ:IEEE Press, 2009, 7-14:1-7.
|
| [10] |
WILCOX B H, LITWIN T, BIESIADECKI J, et al.ATHLETE:A cargo handling and manipulation robot for the moon[J].Journal of Field Robotics, 2007, 24(5):421-434. doi: 10.1002/(ISSN)1556-4967
|
| [11] |
GAN J Q, OYAMA E, ROSALES E M, et al.A complete analytical solution to the inverse kinematics of the Pioneer2 robotic arm[J].Journal of Robotica, 2005, 23(1):123-129. doi: 10.1017/S0263574704000529
|
| [12] |
XU D, CARLOS A, ACOSTA C, et al.An analysis of the inverse kinematics for a 5-DOF manipulator[J].International Journal of Automation and Computing, 2005, 2(2):114-124. doi: 10.1007/s11633-005-0114-1
|
| [13] |
卢君宜, 杨庆华, 高峰, 等.五自由度农业采摘机器人轨迹规[J].机电工程学报, 2010, 27(12):1-6. http://www.cnki.com.cn/Article/CJFDTOTAL-JDGC201012002.htm
LU J Y, YANG Q H, GAO F, et al.Trajectory planning of a 5-DOF agricultural picking robot[J].Journal of Mechanical Electrical Engineering, 2010, 27(12):1-6(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-JDGC201012002.htm
|
| [14] |
丁希仑, 徐坤.一种新型变结构轮腿式机器人的设计与分析[J].中南大学学报, 2009, 40(S1):91-101. http://www.cnki.com.cn/Article/CJFDTOTAL-ZNGD2009S1017.htm
DING X L, XU K.Design and analysis of a novel metamorphic wheel-legged rover mechanism[J].Journal of Central South University, 2009, 40(S1):91-101(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-ZNGD2009S1017.htm
|
| [15] |
陈浩, 丁希仑.四足变结构机器人的运动学分析[J].北京科技大学学报, 2012, 34(1):53-58. http://www.cnki.com.cn/Article/CJFDTOTAL-BJKD201201010.htm
CHEN H, DING X L.Kinematics analysis of a quadruped robot with variable structure[J].Journal of University of Science and Technology Beijing, 2012, 34(1):53-58(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-BJKD201201010.htm
|
| [16] |
BROCKETT R W.Mathematical theory of networks and systems[M].Berlin:Springer, 1984:120-129.
|
| [17] |
于靖军, 刘辛军, 丁希仑, 等.机器人机构学的数学基础[M].北京:机械工业出版社, 2008:60-78.
YU J J, LIU X J, DING X L, et al.Mathematic foundation of mechanisms and robotics[M].Beijing:China Machine Press, 2008:60-78(in Chinese).
|
| [18] |
陈学东, 郭鸿勋.四足机器人爬行步态的正运动学分析[J].机械工程学报, 2003, 39(2):8-12. http://youxian.cnki.com.cn/yxdetail.aspx?filename=BJHK20170105002&dbname=CAPJ2015
CHEN X D, GUO H X.Direct kinematics analysis of crawl gait for a quadruped robot[J].Chinese Journal of Mechanic Engineering, 2003, 39(2):8-12(in Chinese). http://youxian.cnki.com.cn/yxdetail.aspx?filename=BJHK20170105002&dbname=CAPJ2015
|
| [19] |
陈学东, 孙翊, 贾文川.多足步行机器人运动规划与控制[M].武汉:华中科技大学出版, 2006:31-35.
CHEN X D, SUN Y, JIA W C.Motion planning and control of mutilegged walking robots[M].Wuhan:Huazhong University of Science and Technology Press, 2006:31-35(in Chinese).
|
Figures(15) / Tables(1)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: