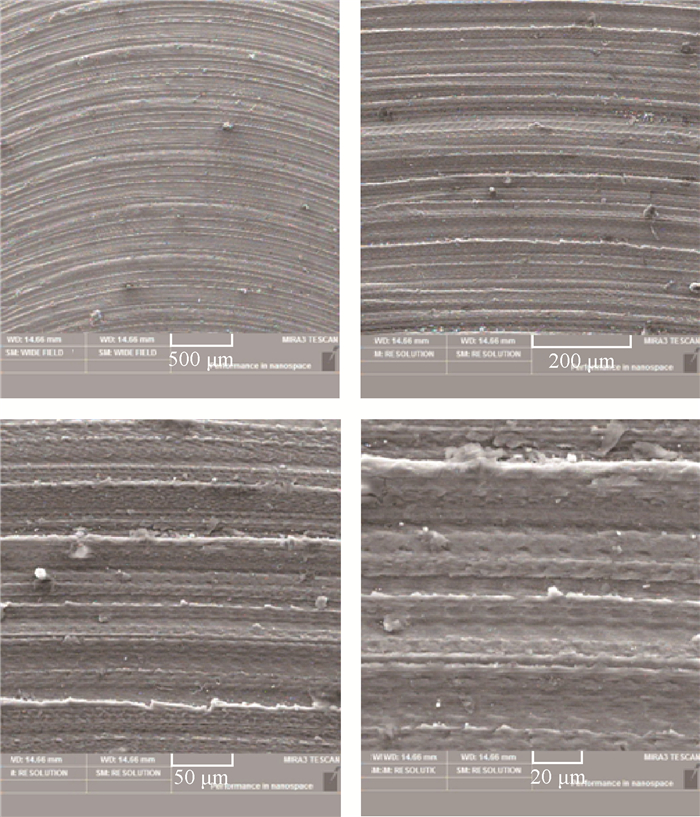
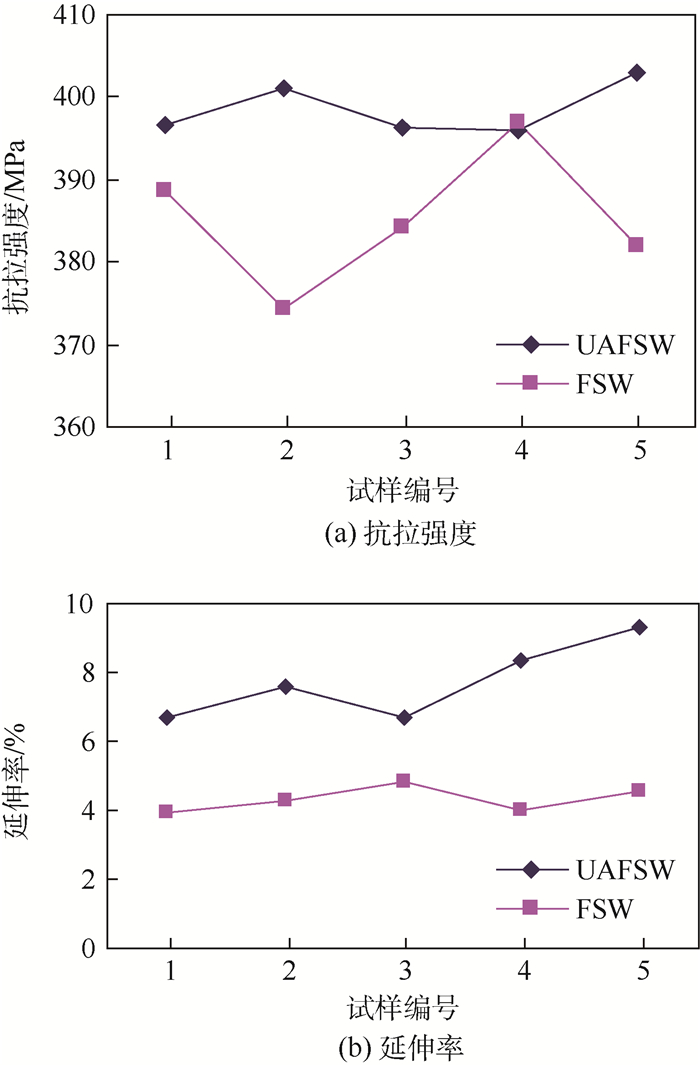
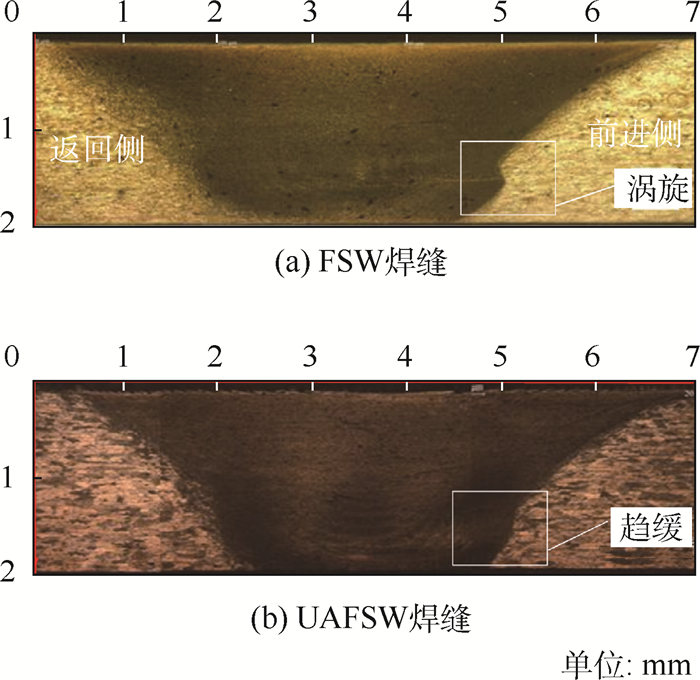
For the bottom of the weld, weak connection and other defects in the friction stir welding(FSW) of aircraft skin, due to the narrowing of the FSW process window, in order to explore a new method that is more suitable for long-range stable welding of large aircraft skin, skinned contrast test between ultrasonic assisted friction stir welding (UAFSW) and FSW were performed, UAFSW and FSW welding were carried out under the same process conditions using 2524-T3 aluminum alloy with thickness of 1.8 mm. Tensile test, metallographic test, and scanning electron microscopy were implemented for perfect UAFSW and FSW weld joints without internal defects. The results show that, compared with FSW weld joints, the UAFSW weld joint defect rate is significantly reduced, and the process window is expanded; the UAFSW weld surface texture is finer and free from laminations; the average tensile strength of UAFSW weld joints reaches 90.7% of strength of the base material, slightly higher than that of FSW weld joints; the average elongation of UAFSW weld joints is higher than FSW weld joints by about 20%. The study found that, compared with FSW, the addition of ultrasonic makes finer and more uniform microstructure for UAFSW weld joints, reduces grain size, and disrupts the regularity of the grains along the rolling direction, which makes the grain sequence show no clear direction.


 Download (42267)
Download (42267) 
 Views
Views  Cited by
Cited by 

































































































































 XML Online Production Platform
XML Online Production Platform
