| Citation: | LI Dian, GUO Sheng, HUANG Guanyu, et al. Kinematic analysis and workspace optimization of a novel 2-2PRUR parallel mechanism[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(10): 2011-2020. doi: 10.13700/j.bh.1001-5965.2016.0816(in Chinese)

|
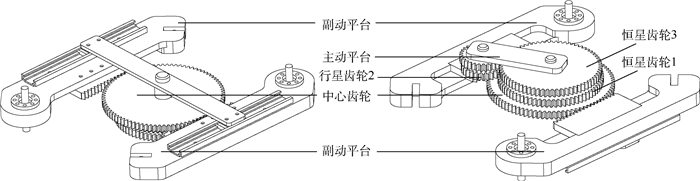
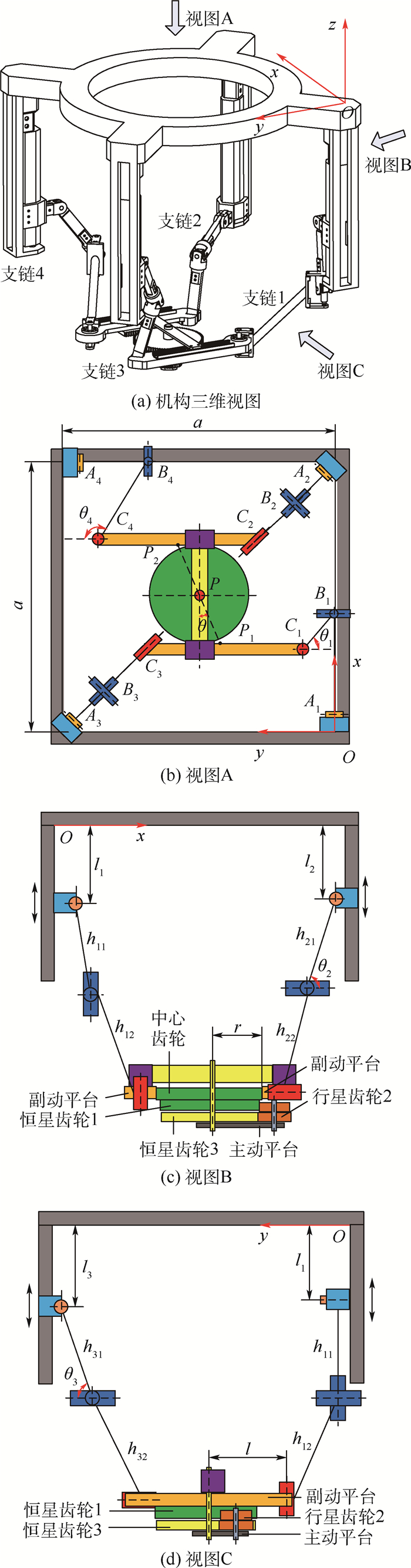
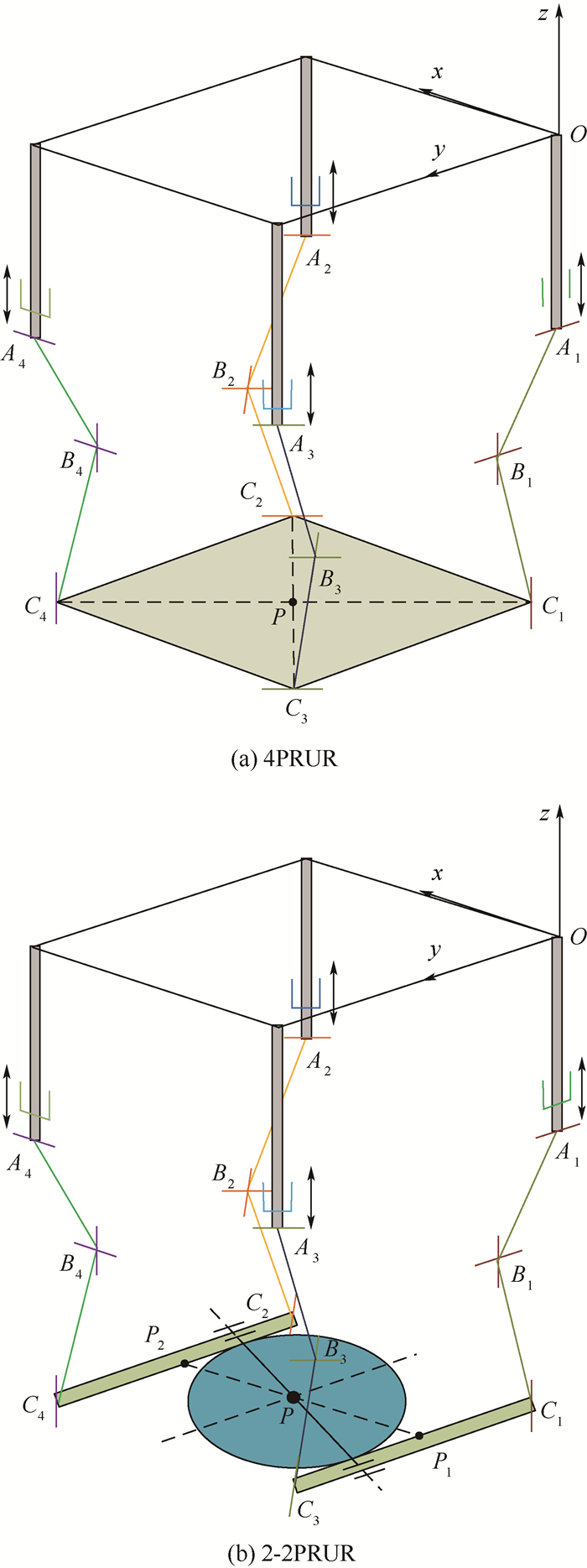
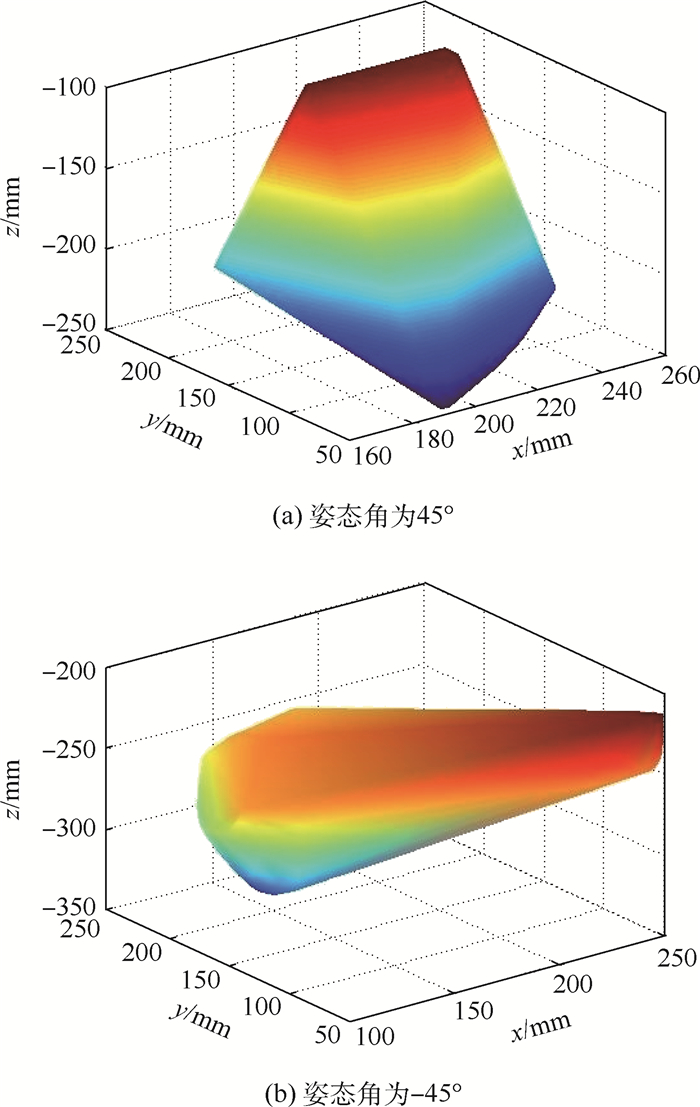
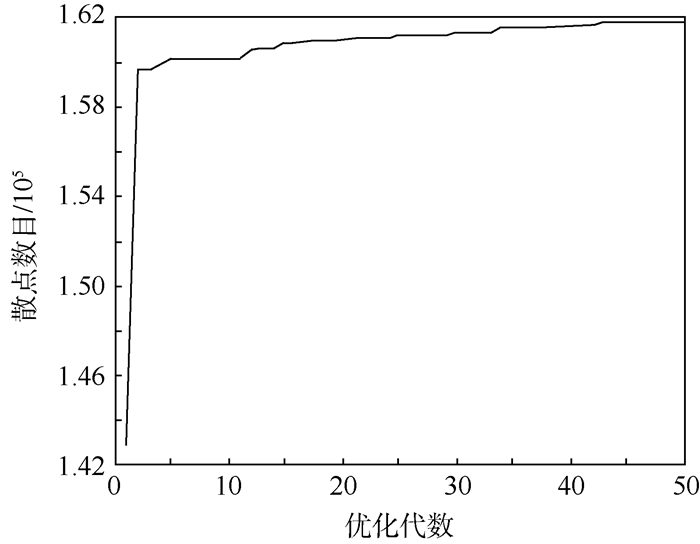
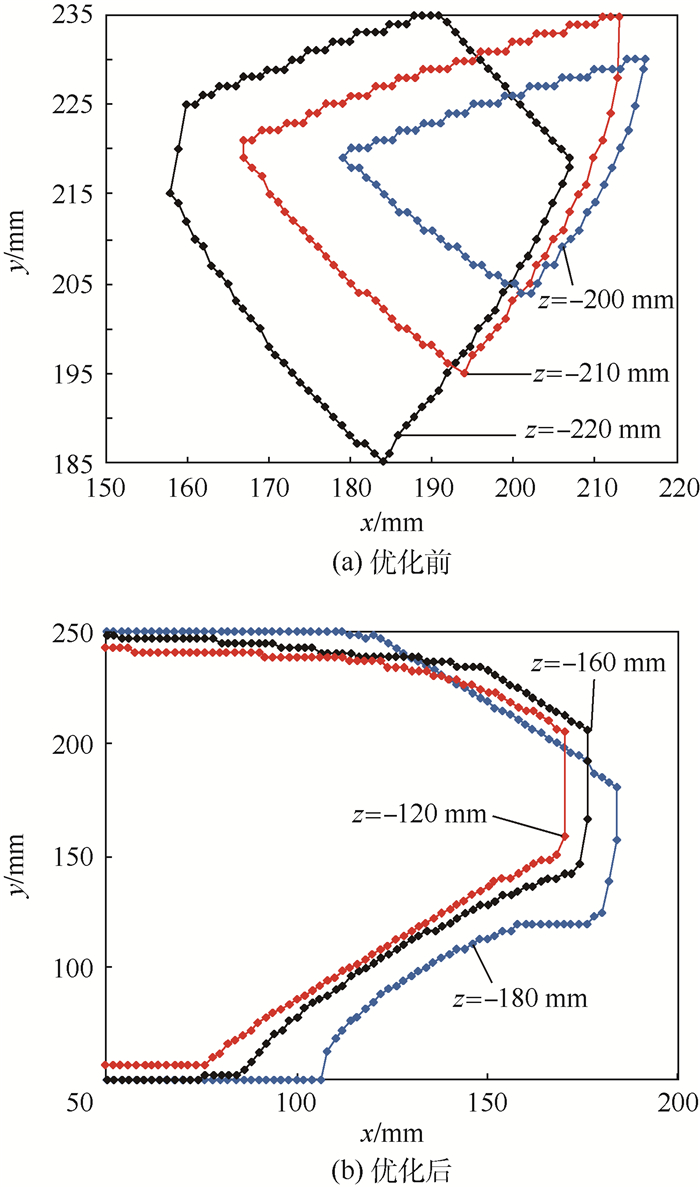
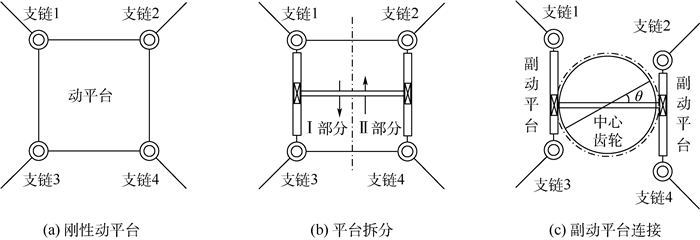
A novel 2-2PRUR parallel mechanism is proposed to fit the actual demand of industrial production line. Kinematics analysis and workspace optimization are performed based on scatter plot. A method is presented by splitting the moving platform into two parts and adding planetary gear train, which could solve the over-constraints of four degrees of freedom parallel mechanism and increase the turning angle. The constraint equations are obtained using the coordinate method. The inverse-forward solutions of the mechanism are worked out. And the workspace is obtained by using the scatter plot of inverse kinematic solutions. Meanwhile, reasonable structural parameters are obtained by optimizing workspace with the principle of maximizing scattered points based on genetic algorithm. This work would lay the foundation for the future research and application of this type of parallel mechanism.
| [1] |
房海蓉, 方跃法, 郭胜.四自由度对称并联机器人结构综合方法[J].北京航空航天大学学报, 2005, 31(3):346-350.
FANG H R, FANG Y F, GUO S.Structural synthesis method for 4-degrees-of-freedom symmetrical parallel manipulators[J].Journal of Beijing University of Aeronautics and Astronautics, 2005, 31(3):346-350(in Chinese).
|
| [2] |
郭江真, 王丹, 樊锐, 等.3PRS/UPS冗余驱动并联机器人刚度特性分布[J].北京航空航天大学学报, 2014, 40(4):500-506.
GUO J Z, WANG D, FAN R, et al.Stiffness characteristics distribution of 3PRS/UPS parallel manipulator with actuation redundancy[J].Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(4):500-506(in Chinese).
|
| [3] |
CLAVEL R.Delta, a fast robot with parallel geometry[C]//Proceedings of the 18th International Symposium on Industrial Robots.Bedford:IFS Publications, 1988:91-100.
|
| [4] |
ANGELES J.The qualitative synthesis of parallel manipulators[J].Journal of Mechanical Design, 2004, 126(4):617-624. doi: 10.1115/1.1667955
|
| [5] |
KONG X, GOSSELIN C.Type synthesis of 3T1R 4-DOF parallel manipulators based on screw theory[J].Journal of Robotic Systems, 2005, 22(10):535-547. doi: 10.1002/(ISSN)1097-4563
|
| [6] |
GOGU G.Structural synthesis of fully-isotropic parallel robots with Sch nflies motions via theory of linear transformations and evolutionary morphology[J].European Journal of Mechanics-A/Solids, 2007, 26(2):242-269. doi: 10.1016/j.euromechsol.2006.06.001
|
| [7] |
SALGADO O, ALTUZARRA O, PETUYA V, et al.Type synthesis of a novel 3T1R fully-parallel manipulator[J].Journal of Mechanical Design, 2008, 130(4):042305-1-042305-8. doi: 10.1115/1.2839005
|
| [8] |
PIERROT F, NABAT V, COMPANY O, et al.Optimal design of a 4-DOF parallel manipulator:From academia to industry[J].IEEE Transactions on Robotics, 2009, 25(2):213-224. doi: 10.1109/TRO.2008.2011412
|
| [9] |
PIERROT F, COMPANY O.H4:A new family of 4-DOF parallel robots[C]//Proceedings of IEEE/ASME International Conference on Advanced Intelligent Mechatronics.Piscataway, NJ:IEEE Press, 1999:508-513.
|
| [10] |
COMPANY O, KRUT S, PIERROT F.Internal singularity analysis of a class of lower mobility parallel manipulators with articulated traveling plate[J].IEEE Transactions on Robotics, 2006, 22(1):1-11. doi: 10.1109/TRO.2005.858862
|
| [11] |
ROLLAND L.The Manta and the Kanuk:Novel 4-DOF parallel mechanisms for industrial handling[C]//Proceedings of International Mechanical Engineering Congress and Exposition.New York, NY:ASME, 1999:831-844.
|
| [12] |
KRUT S, COMPANY O, BENOIT M, et al.I4:A new parallel mechanism for Scara motions[C]//Proceedings of the IEEE International Conference on Robotics & Automation.Piscataway, NJ:IEEE Press, 2003:1875-1880.
|
| [13] |
KRUT S, NABAT V, COMPANY O, et al.A high-speed parallel robot for Scara motions[C]//Proceedings of IEEE International Conference on Robotics and Automation.Piscataway, NJ:IEEE Press, 2004:4109-4115.
|
| [14] |
CORADINI C, FAUROUX J C, KRUT S, et al.Evalution of a 4 degree of freedom parallel manipulator stiffness[C]//Proceedings of the 11th World Congress in Mechanism and Machine Science.Beijing:China Machinery Press, 2004:1857-1861.
|
| [15] |
GUO S, FANG Y, QU H.Type synthesis of 4-DOF non-overconstrained parallel mechanisms based on screw theory[J].Robotica, 2012, 30(1):31-37. doi: 10.1017/S0263574711000439
|
| [16] |
黄真, 刘婧芳, 李艳文.论机构自由度[M].北京:科学出版社, 2011:90-103.
HUANG Z, LIU J F, LI Y W.Mobility of mechanisms[M].Beijing:Science Press, 2011:90-103(in Chinese).
|
| [17] |
黄真, 孔令富, 方跃法.并联机器人机构学理论及控制[M].北京:机械工业出版社, 1997:18-29.
HUANG Z, KONG L F, FANG Y F.Mechanism theory and control of parallel manipulator[M].Beijing:China Machine Press, 1997:18-29(in Chinese).
|
| [18] |
郭宗和, 段建国, 郝秀清, 等.4-PTT并联机构位置正反解与工作空间分析[J].农业机械学报, 2008, 39(7):144-148. http://www.cnki.com.cn/Article/CJFDTOTAL-NYJX200807033.htm
GUO Z H, DUAN J G, HAO X Q, et al.Analysis on position and workspace of 4-PTT parallel mechanism[J].Transactions of the Chinese Society of Agricultural Machinery, 2008, 39(7):144-148(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-NYJX200807033.htm
|
| [19] |
鄔昌峰. 6-SPS并联机器人工作空间研究及其优化设计[D]. 合肥: 合肥工业大学, 2003.
WU C F.6-SPS parallel mechanism workspace research and optimization[D].Hefei:Hefei University of Technology, 2003(in Chinese).
|
| [20] |
陈海真, 邹忠月, 宋宏鹏.基于遗传算法3-RCR并联机器人的结构参数优化设计[J].机械设计与制造, 2012(7):49-51. http://www.cnki.com.cn/Article/CJFDTOTAL-JSYZ201207020.htm
CHEN H Z, ZOU Z Y, SONG H P.Parameters optimization design of 3-RCR parallel robot mechanism based on genetic algorithm[J].Machinery Design & Manufacture, 2012(7):49-51(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-JSYZ201207020.htm
|
| [1] | LU X,SUN Y N,TANG J,et al. Kinematic characteristics analysis of vehicle-aircraft towing taxi system considering wheel deformation[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(2):478-486 (in Chinese). doi: 10.13700/j.bh.1001-5965.2023.0029. |
| [2] | JIN B,LI S Y,LIU N N,et al. Kinematic absolute and relative orbit determination of Swarm satellites with heterogeneous orbits[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(2):409-418 (in Chinese). doi: 10.13700/j.bh.1001-5965.2023.0039. |
| [3] | HUANG X G,WU Y F,LIU D Y. Position analysis of seven-link Barranov truss based on conformal geometric algebra[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(1):265-271 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0961. |
| [4] | TIAN D K,ZHANG J W,JIN L,et al. Design and analysis of morphing wing mechanism based on equilateral Bennett mechanism[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(3):742-752 (in Chinese). doi: 10.13700/j.bh.1001-5965.2023.0139. |
| [5] | WANG C,LIU W,GAO Y. Three convexification-based methods for six-degree-of-freedom powered descent guidance[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(4):1292-1303 (in Chinese). doi: 10.13700/j.bh.1001-5965.2023.0235. |
| [6] | HUANG Dan, LONG Jian-fei, CHENG Ye, WANG Jia-bin, XU Lu-xiang, YANG Wei. Experimental study on beam characteristics of μHT-1 Thruster under wide range adjustment of operating parameters[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0406 |
| [7] | WANG Hongyong, HUANG Jiawen, JIANG Gaoyang, ZHONG Fengwei. Large-scale Trajectory Optimization Based on Air Traffic Complexity[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0069 |
| [8] | HE T Y,DONG Y,ZHOU S M,et al. Performance analysis and optimization of buffering/walking integrated lunar probe[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(8):2547-2556 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0634. |
| [9] | ZHANG C Y,WANG G,CHE H L,et al. Motion analysis and gait planning of a novel revolving wheel-legged robot[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(5):1675-1684 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0491. |
| [10] | HE T Y,DONG Y,TAN L M,et al. Kinematic analysis and continuous gait planning of lunar-based equipment in walking state[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(1):308-316 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0232. |
| [11] | WU Y,XIE C C,YANG C. Optimal design of shape and motion parameters of a flapping wing[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(12):3311-3320 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0146. |
| [12] | CHEN R H,LUO J,HU A Y,et al. Uniform circular multiphase modulation correlation radiometer and its sensitivity analysis[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(7):1857-1863 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0560. |
| [13] | ZHU W S,LYU X J,HOU Z Q,et al. Trajectory optimization of air-to-surface missile in full airspace based on combinational optimization algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(2):344-352 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0252. |
| [14] | YANG Yi-feng, WANG Yi, LIU Ao-yu, LI Jia, XIE Li-yang. Calculation and error analysis of kinematic accuracy reliability of VSV adjustment mechanism[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0410 |
| [15] | HE T Y,DONG Y,WANG H,et al. Design and optimization of modular parabolic deployable mechanism[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(9):2473-2481 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0652. |
| [16] | HE L T,FANG H R,CHEN Y F,et al. Design and performance analysis of spatial large extension parallel mechanism[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(7):1722-1734 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0548. |
| [17] | ZHANG Libo, LI Yupeng, ZHU Deming, FU Yongling. Inverse kinematic solution of nursing robot based on genetic algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(10): 1925-1932. doi: 10.13700/j.bh.1001-5965.2021.0042 |
| [18] | YANG Chao, JIANG Yu, WU Zhigang. Numerical simulation of skipping motion of three-dimensional structure based on boundary element method[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(9): 1678-1691. doi: 10.13700/j.bh.1001-5965.2022.0141 |
| [19] | ZHOU Lifang, LIU Jinlan, LI Weisheng, LEI Bangjun, HE Yu, WANG Yihan. Object tracking method based on IoU-constrained Siamese network[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(8): 1390-1398. doi: 10.13700/j.bh.1001-5965.2021.0533 |
| [20] | DU Mo, MENG Bao, PAN Feng, WAN Min. Optimal design of printed circuit heat exchanger considering manufacturing constraints[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(10): 1994-2005. doi: 10.13700/j.bh.1001-5965.2021.0045 |
| 1. | 马春生,马振东,尹晓秦,米文博. 基于2-UPR/RPS并联机构尺度对工作空间的影响. 科学技术与工程. 2021(15): 6257-6261 .  | |
| 2. | 于红英,刘鹏,赵娣. 基于支链的并联机构位置分析及工作空间分析. 吉林大学学报(工学版). 2020(04): 1275-1282 . | |
| 3. | 李典,郭盛. 一种变工作空间并联机构的设计及应用. 中南大学学报(自然科学版). 2020(10): 2800-2810 . | |
| 4. | 李云,张加波,韩建超,蔡子慧,鲁利刚,赵琳娜. 大型天线装配测量与实时反馈调整技术. 南京航空航天大学学报. 2019(S1): 88-93 . |

Figures(10) / Tables(4)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

Chen Ming, Sun Junyong. Application of trigonometric series for rigid wakes analysis of rotor aerodynamics in hover[J]. Journal of Beijing University of Aeronautics and Astronautics, 2005, 31(05): 512-515. (in Chinese)




 DownLoad:
DownLoad: