| Citation: | NIE Chunyu, ZHU Ming, ZHENG Zewei, et al. Airship control based on Q-Learning algorithm and neural network[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(12): 2431-2438. doi: 10.13700/j.bh.1001-5965.2016.0903(in Chinese)

|
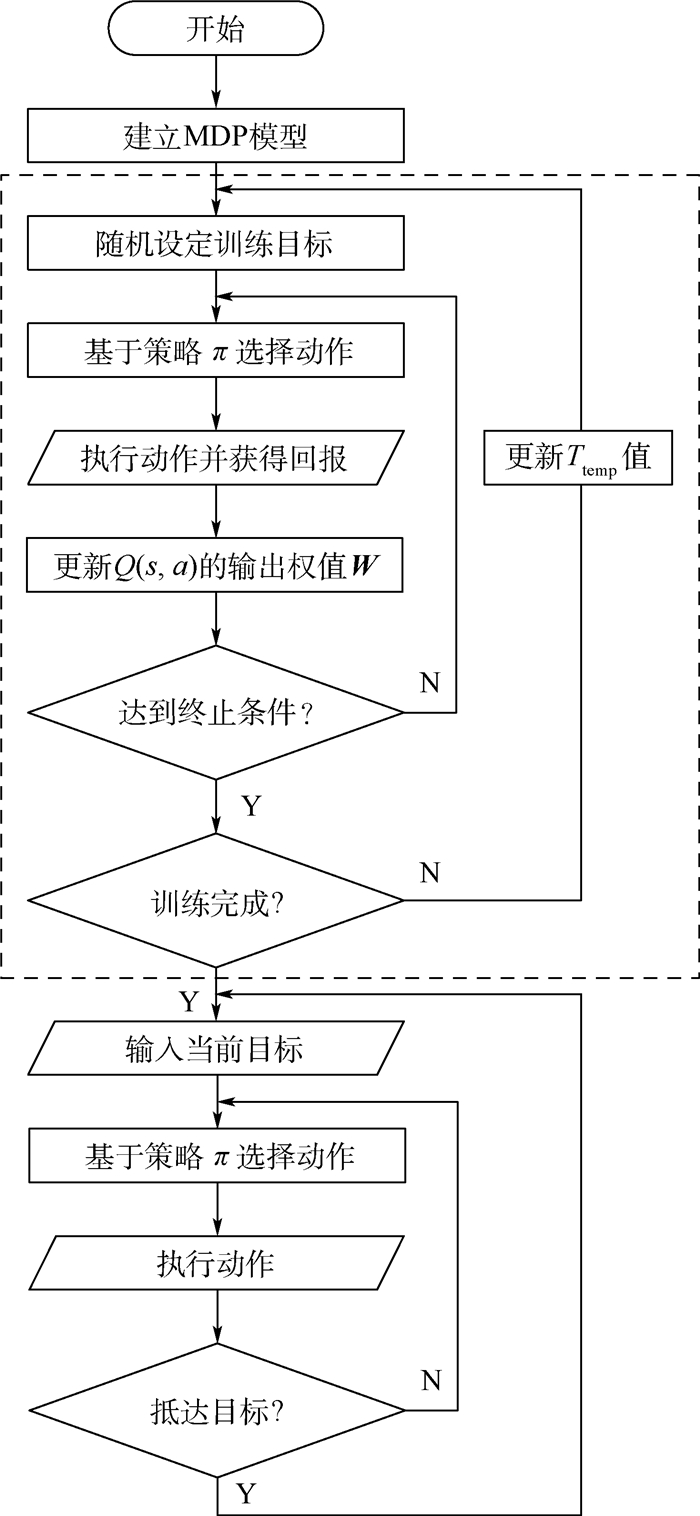
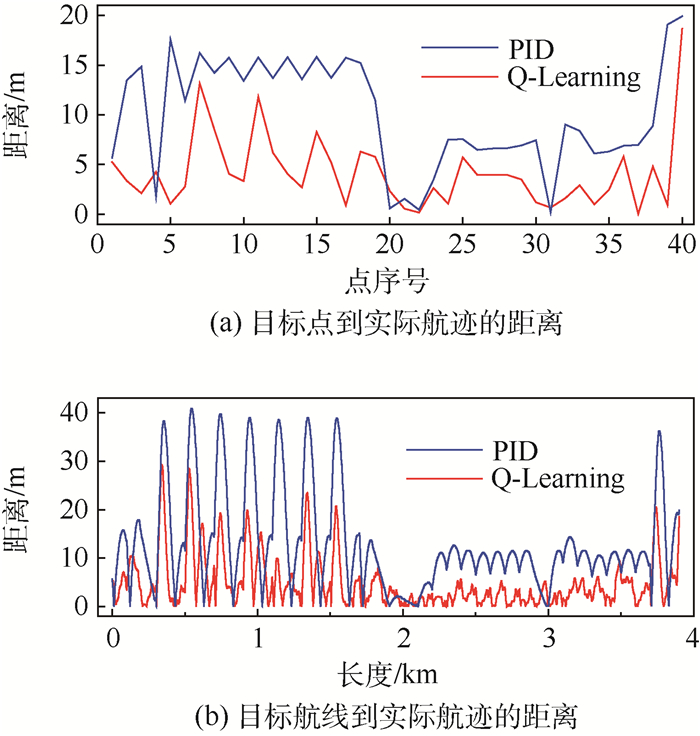
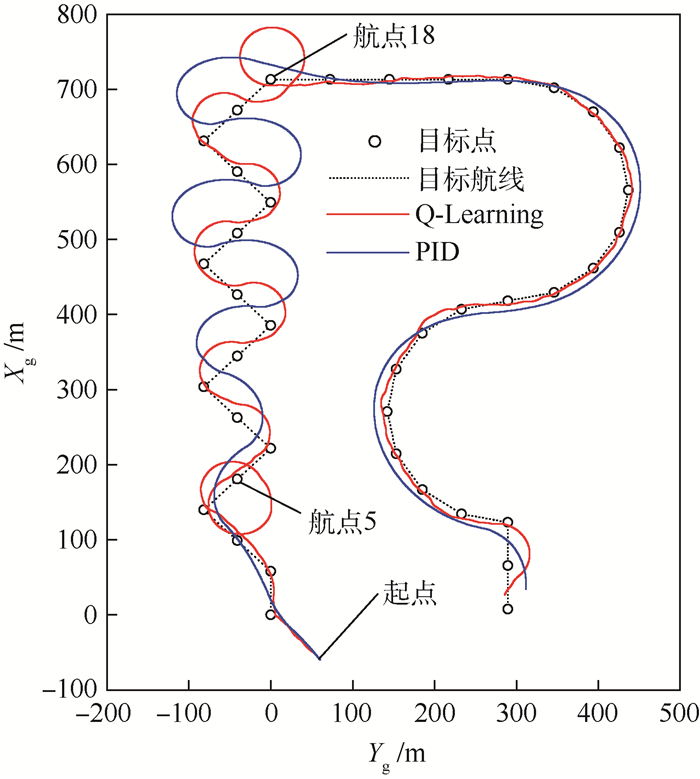
An autonomous on-line learning control strategy based on adaptive modeling mechanism was proposed aimed at system modeling and parameter identification problems resulting from dynamic model uncertainties in modern airship control. An adaptive method to establish airship control Markov decision process (MDP) model was introduced on the foundation of analyzing airship's actual motion. On-line learning was carried out by Q-Learning algorithm, and cerebellar model articulation controller (CMAC) network was brought in for generalization of action value functions to accelerate algorithm convergence speed. Simulations of this autonomous on-line learning controller and comparisons with parameters turned PID controllers in normal control tasks were presented to demonstrate Q-Learning controller's effectiveness. The results show that the controller's on-line learning processes can converge in a few hours and the airship control MDP model established by the adaptive method satisfies the need of normal control tasks. The controller designed in this paper obtains similar precision as PID controllers and performs even more intelligently.
| [1] |
PRENTICE B E, KNOTTS R.Cargo airships:International competition[J].Journal of Transportation Technologies, 2014, 4:187-195. doi: 10.4236/jtts.2014.43019
|
| [2] |
赵达, 刘东旭, 孙康文, 等.平流层飞艇研制现状、技术难点及发展趋势[J].航空学报, 2016, 37(1):45-56.
ZHAO D, LIU D X, SUN K W, et al.Research status, technical difficulties and development trend of stratospheric airship[J].Acta Aeronautica et Astronautica Sinica, 2016, 37(1):45-56(in Chinese).
|
| [3] |
郭虓. 平流层浮空器轨迹优化研究[D]. 北京: 北京航空航天大学, 2013: 29-36.
GUO X.Trajectory optimization research for stratospheric aerostat[D].Beijing:Beihang University, 2013:29-36(in Chinese).
|
| [4] |
KHOURY G A.Airship technology[M].New York:Cambridge University Press, 2012:34-40.
|
| [5] |
YANG Y, WU J, ZHENG W.Positioning control for an autonomous airship[J].Journal of Aircraft, 2016, 53(6):1638-1646. doi: 10.2514/1.C033709
|
| [6] |
ZHENG Z W, ZHU M, SHI D L, et al.Hovering control for a stratospheric airship in unknown wind:AIAA-2014-0973[R].Reston:AIAA, 2014. doi: 10.2514/6.2014-0973
|
| [7] |
ZHENG Z, LIU L, ZHU M.Integrated guidance and control path following and dynamic control allocation for a stratospheric airship with redundant control systems[J].Proceedings of the Institution of Mechanical Engineers, Part G:Journal of Aerospace Engineering, 2016, 230(10):1813-1826. doi: 10.1177/0954410015613738
|
| [8] |
YANG Y, YAN Y, ZHU Z, et al.Positioning control for an unmanned airship using sliding mode control based on fuzzy approximation[J].Proceedings of the Institution of Mechanical Engineers, Part G:Journal of Aerospace Engineering, 2014, 228(14):2627-2640. doi: 10.1177/0954410014523577
|
| [9] |
ABBEEL P, COATES A, QUIGLEY M, et al.An application of reinforcement learning to aerobatic helicopter flight[C]//Advances in Neural Information Processing Systems, 2007:1-8.
|
| [10] |
徐昕.增强学习与近似动态规划[M].北京:科学出版社, 2010:18-27.
XU X.Reinforcement learning and approximate dynamic programing[M].Beijing:Science Press, 2010:18-27(in Chinese).
|
| [11] |
PEARRE B, BROWN T X.Model-free trajectory optimization for unmanned aircraft serving as data ferries for widespread sensors[J].Remote Sensing, 2012, 4(10):2971-3005.
|
| [12] |
RAGI S, CHONG E K P.UAV path planning in a dynamic environment via partially observable Markov decision process[J].IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(4):2397-2412. doi: 10.1109/TAES.2013.6621824
|
| [13] |
DUNN C, VALASEK J, KIRKPATRICK K.Unmanned air system search and localization guidance using reinforcement learning:AIAA-2012-2589[R].Reston:AIAA, 2012. doi: 10.2514/6.2012-2589
|
| [14] |
ZHANG B, MAO Z, LIU W, et al.Geometric reinforcement learning for path planning of UAVs[J].Journal of Intelligent & Robotic Systems, 2015, 77(2):391-409. doi: 10.1007/s10846-013-9901-z
|
| [15] |
FAUST A.Reinforcement learning and planning for preference balancing tasks[J].AI Matters, 2015, 1(3):8-12.
|
| [16] |
KO J, KLEIN D J, FOX D, et al.Gaussian processes and reinforcement learning for identification and control of an autonomous blimp[C]//Proceedings 2007 IEEE International Conference on Robotics and Automation.Piscataway, NJ:IEEE Press, 2007:742-747.
|
| [17] |
ROTTMANN A, PLAGEMANN C, HILGERS P, et al.Autonomous blimp control using model-free reinforcement learning in a continuous state and action space[C]//2007 IEEE/RSJ International Conference on Intelligent Robots and Systems.Piscataway, NJ:IEEE Press, 2007:1895-1900.
|
| [18] |
LIN C M, PENG Y F.Adaptive CMAC-based supervisory control for uncertain nonlinear systems[J].IEEE Transactions on Systems, Man, and Cybernetics, Part B(Cybernetics), 2004, 34(2):1248-1260. doi: 10.1109/TSMCB.2003.822281
|
| [19] |
SCHMIDT D K.Modeling and near-space station keeping control of a large high-altitude airship[J].Journal of Guidance, Control, and Dynamics, 2007, 30(2):540-547. doi: 10.2514/1.24865
|
| [20] |
LS-S1200 UAV airship system overview parameters[EB/OL].[2017-12-18].
|
| [21] |
ATAEI M, YOUSEFI-KOMA A.Three-dimensional optimal path planning for waypoint guidance of an autonomous underwater vehicle[J].Robotics and Autonomous Systems, 2015, 67:23-32. doi: 10.1016/j.robot.2014.10.007
|
| 1. | 龙远,邓小龙,杨希祥,侯中喜. 基于PSO-BP神经网络的平流层风场短期快速预测. 北京航空航天大学学报. 2022(10): 1970-1978 .  本站查看 本站查看 | |
| 2. | 张秦浩,敖百强,张秦雪. Q-learning强化学习制导律. 系统工程与电子技术. 2020(02): 414-419 .  | |
| 3. | 卫玉梁,靳伍银. 基于神经网络Q-learning算法的智能车路径规划. 火力与指挥控制. 2019(02): 46-49 . | |
| 4. | 闫军威,黄琪,周璇. 基于Double-DQN的中央空调系统节能优化运行. 华南理工大学学报(自然科学版). 2019(01): 135-144 . | |
| 5. | 汪黎明. 制造企业零库存管理物资调度方法研究. 价值工程. 2019(23): 126-129 . |


Figures(9) / Tables(3)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

WU Da-fang, GAO Zhen-tong, WANG Yong-haiet al. Experimental Study on Fuzzy Control of Transient Aerodynamic Heat Flow of Missile[J]. Journal of Beijing University of Aeronautics and Astronautics, 2002, 28(6): 682-684. (in Chinese)





 DownLoad:
DownLoad: