| Citation: | YANG Hui, FANG Hairong, LI Dian, et al. Kinematics analysis and multi-objective optimization of a novel parallel perfusion robot[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(3): 568-575. doi: 10.13700/j.bh.1001-5965.2017.0157(in Chinese)

|
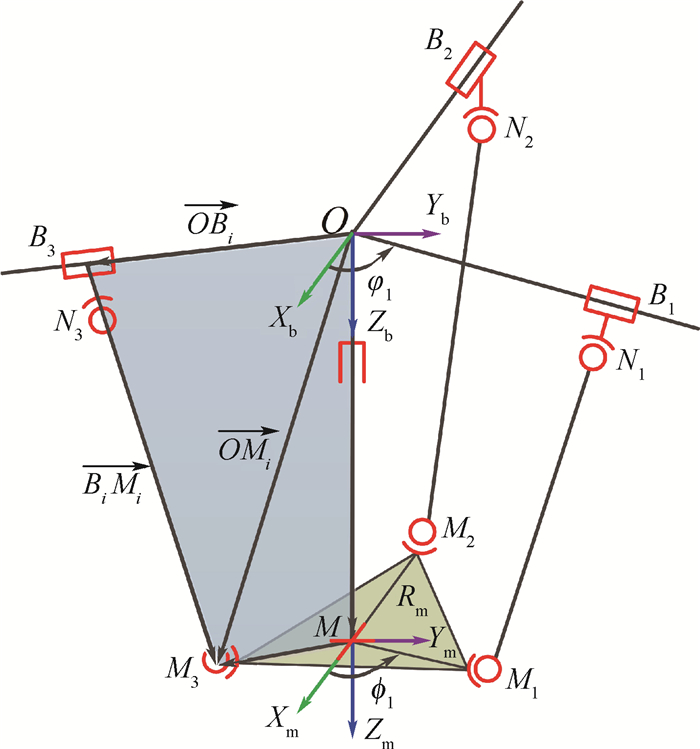
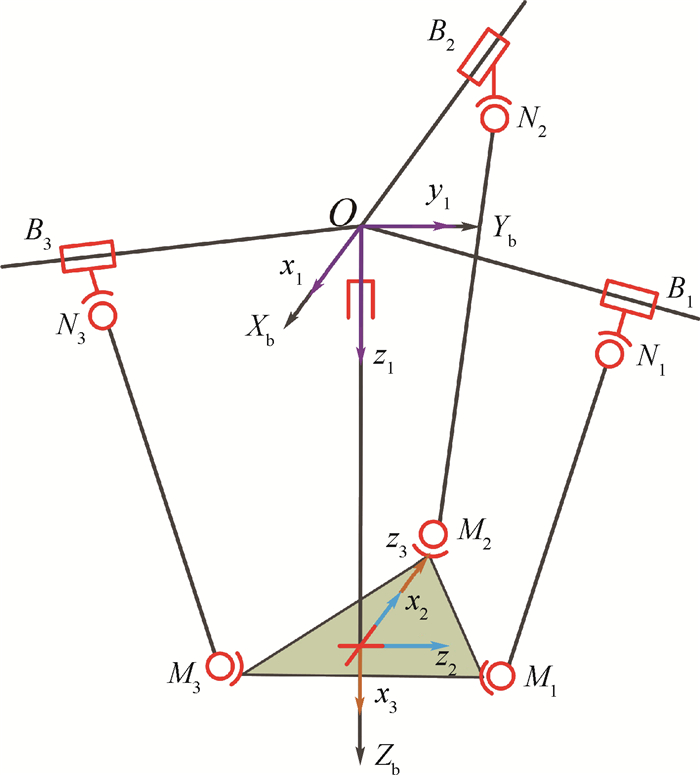
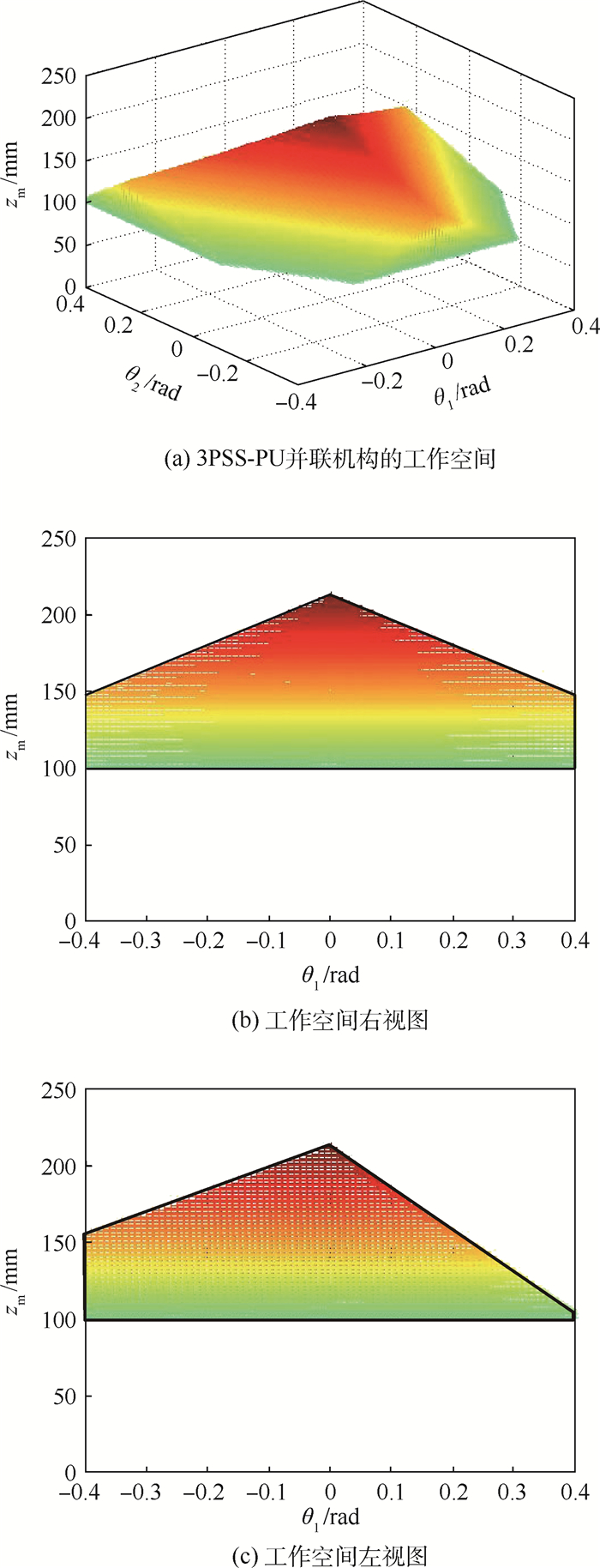
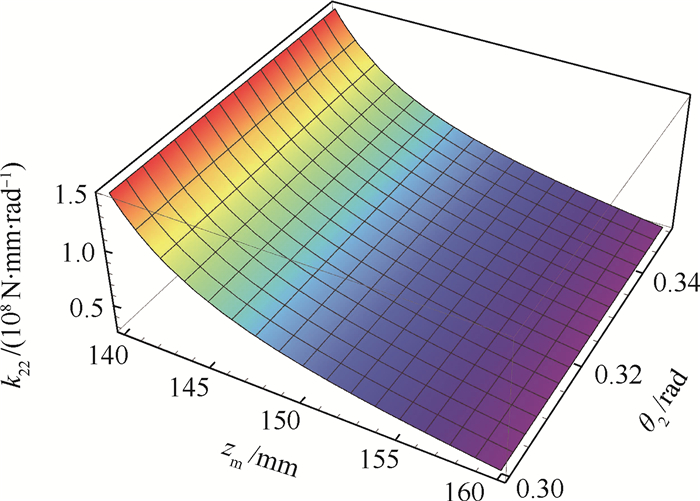
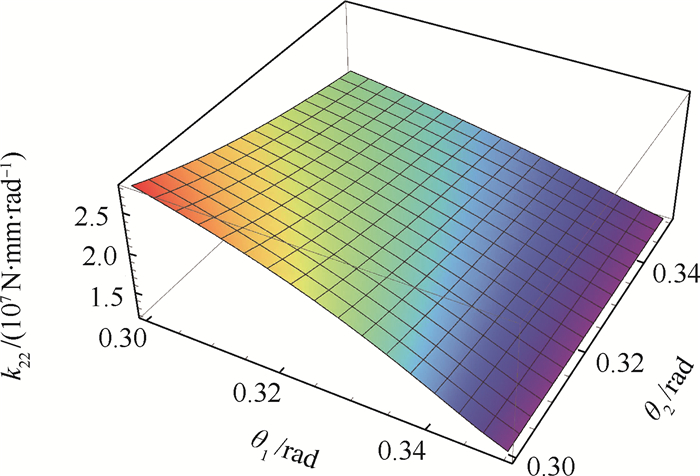
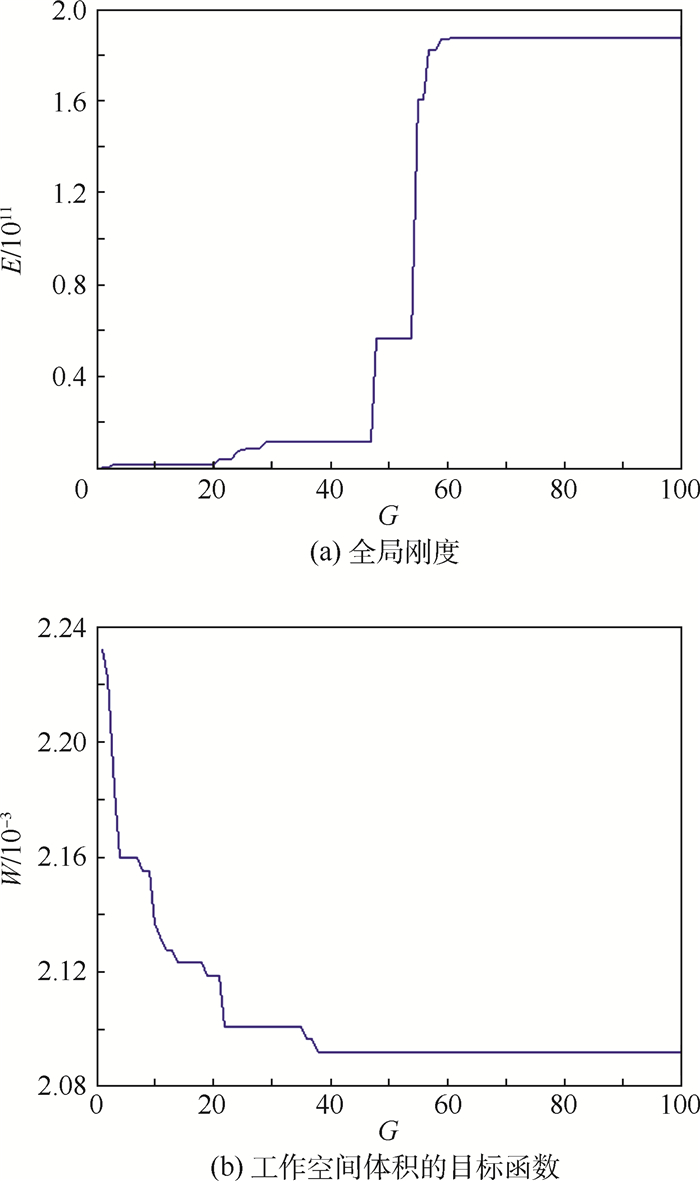
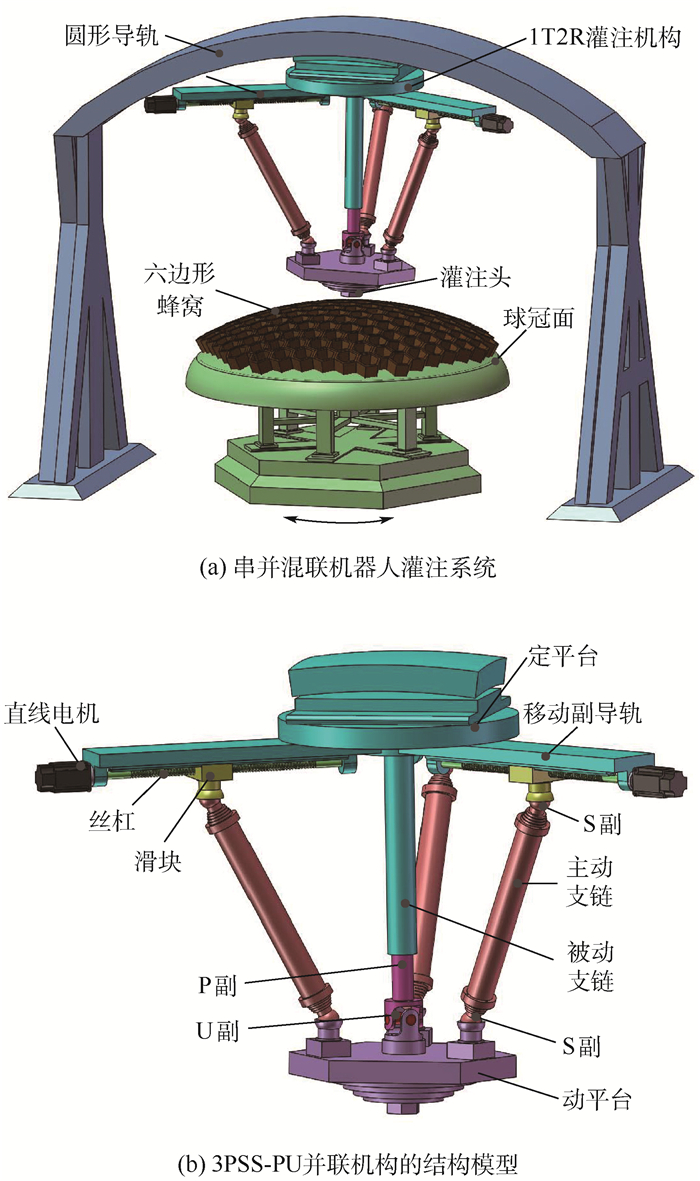
In order to meet the demand of honeycomb structure perfusion of large spacecraft, a novel hybrid perfusion robot is proposed. This article mainly focuses on the analysis of the parallel mechanism. First, the kinematics analysis of 3PSS-PU parallel mechanism is conducted, and the inverse kinematic model and Jacobian matrix of 3PSS-PU mechanism are established. Then, the constraints of the main factors influencing workspace of the mechanism are given, and the reachable workspace is obtained. Next, stiffness model of the mechanism is established, and stiffness distribution of the mechanism in the process of movement is displayed. Finally, aimed at workspace volume and global stiffness, multi-objective optimization analysis of structure parameters is performed based on genetic algorithm, and final dimension parameters of the mechanism are obtained. This work would lay the foundation for the application of the honeycomb perfusion robot.

| [1] |
ACKERMAN P K, BAKER A L, NEWQUIST C W. Thermal protection system: US 5322725[P]. 1994-06-21.
|
| [2] |
WU D F, ZHOU A F, ZHENG L M, et al.Study on the thermal protection performance of superalloy honeycomb panels in high-speed thermal shock environments[J].Theoretical & Applied Mechanics Letters, 2014, 4(2):19-26. http://kns.cnki.net/KCMS/detail/detail.aspx?filename=lxkb201402003&dbname=CJFD&dbcode=CJFQ
|
| [3] |
程文礼, 袁超, 邱启艳, 等.航空用蜂窝夹层结构及制造工艺[J].航空制造技术, 2015, 476(7):94-98. http://kns.cnki.net/KCMS/detail/detail.aspx?filename=hkgj201507022&dbname=CJFD&dbcode=CJFQ
CHENG W L, YUAN C, QIU Q Y, et al.Honeycomb sandwich structure and manufacturing process in aviation industry[J]. Aeronautical Manufacturing Technology, 2015, 476(7):94-98(in Chinese). http://kns.cnki.net/KCMS/detail/detail.aspx?filename=hkgj201507022&dbname=CJFD&dbcode=CJFQ
|
| [4] |
张纪奎, 马志阳, 李学梅, 等.带防热层复合材料锥壳热固化变形的数值模拟[J].北京航空航天大学学报, 2013, 39(8):1037-1041. http://bhxb.buaa.edu.cn/CN/abstract/abstract12694.shtml
ZHANG J K, MA Z Y, LI X M, et al.Numerical simulation of cure deformation of composite taper shell with thermal protection layer[J]. Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(8):1037-1041(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract12694.shtml
|
| [5] |
郑力铭, 吴大方, 王岳武, 等.金属蜂窝板高温环境下的隔热性能试验与计算[J].北京航空航天大学学报, 2012, 38(6):731-735. http://bhxb.buaa.edu.cn/CN/abstract/abstract12301.shtml
ZHENG L M, WU D F, WANG Y W, et al.Experiment and numerical simulation on heat-shielding properties of metallic honeycomb panel in high temperature environment[J].Journal of Beijing University of Aeronautics and Astronautics, 2012, 38(6):731-735(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract12301.shtml
|
| [6] |
LEE C S G, ZIEGLER M.Geometric approach in solving inverse kinematics of PUMA robots[J]. IEEE Transactions on Aerospace & Electronic Systems, 1984, 20(6):695-706. http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=4103975
|
| [7] |
OMODEI A, LEGNANI G, ADAMINI R.Three methodologies for the calibration of industrial manipulators:Experimental results on a SCARA robot[J].Journal of Robotic Systems, 2000, 17(6):291-307. doi: 10.1002/(ISSN)1097-4563
|
| [8] |
NUBIOLA A, BONEV I A.Absolute calibration of an ABB IRB 1600 robot using a laser tracker[J].Robotics and Computer-Integrated Manufacturing, 2013, 29(1):236-245. doi: 10.1016/j.rcim.2012.06.004
|
| [9] |
FANG Y F, TSAI L W.Structure synthesis of a class of 4-DoF and 5-DoF parallel manipulators with identical limb structures[J].International Journal of Robotics Research, 2002, 21(9):799-810. doi: 10.1177/0278364902021009314
|
| [10] |
房海蓉, 方跃法, 郭胜.四自由度对称并联机器人结构综合方法[J].北京航空航天大学学报, 2005, 31(3):346-350. http://bhxb.buaa.edu.cn/CN/abstract/abstract10721.shtml
FANG H R, FANG Y F, GUO S.Structural synthesis method for 4-degrees-of-freedom symmetrical parallel manipulators[J]. Journal of Beijing University of Aeronautics and Astronautics, 2005, 31(3):346-350(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract10721.shtml
|
| [11] |
张克涛, 方跃法, 房海蓉.基于变胞原理的一种探测车机构设计与分析[J].北京航空航天大学学报, 2007, 33(7):838-841. http://bhxb.buaa.edu.cn/CN/abstract/abstract9505.shtml
ZHANG K T, FANG Y F, FANG H R.Design and analysis of a rover mechanism based on the metamorphic principle[J].Journal of Beijing University of Aeronautics and Astronautics, 2007, 33(7):838-841(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract9505.shtml
|
| [12] |
PASHKEVICH A, CHABLAT D, WENGER P.Stiffness analysis of over-constrained parallel manipulators[J].Mechanism & Machine Theory, 2009, 44(5):966-982. http://www.sciencedirect.com/science/article/pii/S0094114X08001250
|
| [13] |
GAO Z, ZHANG D.Performance analysis, mapping, and multi-objective optimization of a hybrid robotic machine tool[J]. IEEE Transactions on Industrial Electronics, 2015, 62(1):423-433. doi: 10.1109/TIE.2014.2327008
|
| [14] |
GAO F, PENG B, ZHAO H, et al.A novel 5-DOF fully parallel kinematic machine tool[J].The International Journal of Advanced Manufacturing Technology, 2006, 31(1):201-207. doi: 10.1007/s00170-005-0171-1
|
| [15] |
陈友东, 季旭东, 汤伟.管道喷涂机器人:结构与位姿调整[J].北京航空航天大学学报, 2015, 41(2):209-215. http://bhxb.buaa.edu.cn/CN/abstract/abstract13150.shtml
CHEN Y D, JI X D, TANG W.Pipeline spraying robot:Structure and pose adjustment[J].Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(2):209-215(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract13150.shtml
|
| [16] |
于靖军, 毕树生, 宗光华, 等.面向生物工程的微操作机器人机构型综合研究[J].北京航空航天大学学报, 2001, 27(3):356-360. http://bhxb.buaa.edu.cn/CN/abstract/abstract11072.shtml
YU J J, BI S S, ZONG G H, et al.Research on type synthesis of micromanipulation mechanisms for bioengineering[J].Journal of Beijing University of Aeronautics and Astronautics, 2001, 27(3):356-360(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract11072.shtml
|
| [17] |
KIM G S, SHIN H J, YOON J.Development of 6-axis force/moment sensor for a humanoid robot's intelligent foot[J].Sensors & Actuators A Physical, 2008, 2(3):122-133. http://www.sciencedirect.com/science/article/pii/S0924424707005961
|
| [18] |
CHI Z, ZHANG D, XIA L, et al.Multi-objective optimization of stiffness and workspace for a parallel kinematic machine[J]. International Journal of Mechanics and Materials in Design, 2013, 9(3):281-293. doi: 10.1007/s10999-013-9219-9
|
| [19] |
KONAK A, COIT D W, SMITH A E.Multi-objective optimization using genetic algorithms:A tutorial[J].Reliability Engineering & System Safety, 2006, 91(9):992-1007. https://www.sciencedirect.com/science/article/pii/S0951832005002012
|
| [20] |
HUANG H Z, QU N J, ZUO N M J. A new method of system reliability multi-objective optimization using genetic algorithms[C]//Proceedings of Reliability and Maintainability Symposium. Piscataway, NJ: IEEE Press, 2006: 278-283.
|
Figures(8) / Tables(4)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: