| Citation: | LU Zhaoxing, FANG Jiancheng, WANG Shicheng, et al. Application of adaptive FLP filter to ring laser gyro IMU calibration[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(6): 1213-1220. doi: 10.13700/j.bh.1001-5965.2017.0462(in Chinese)

|
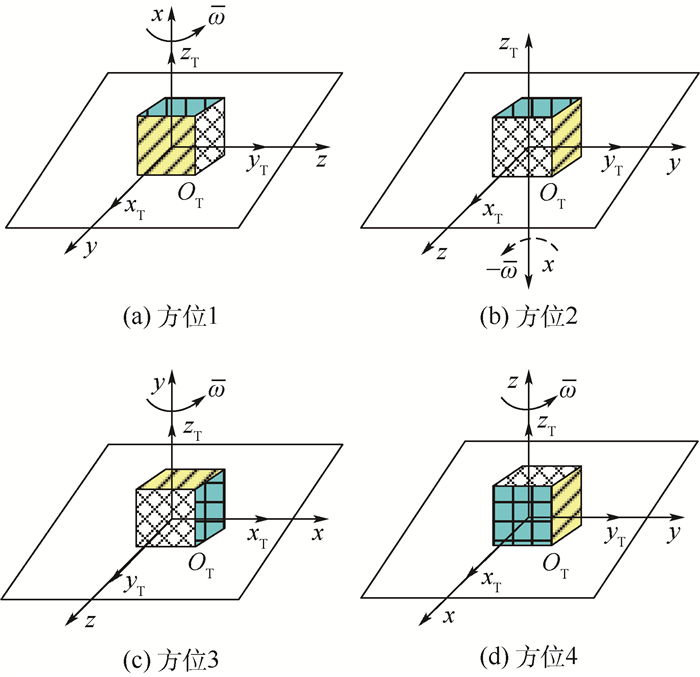
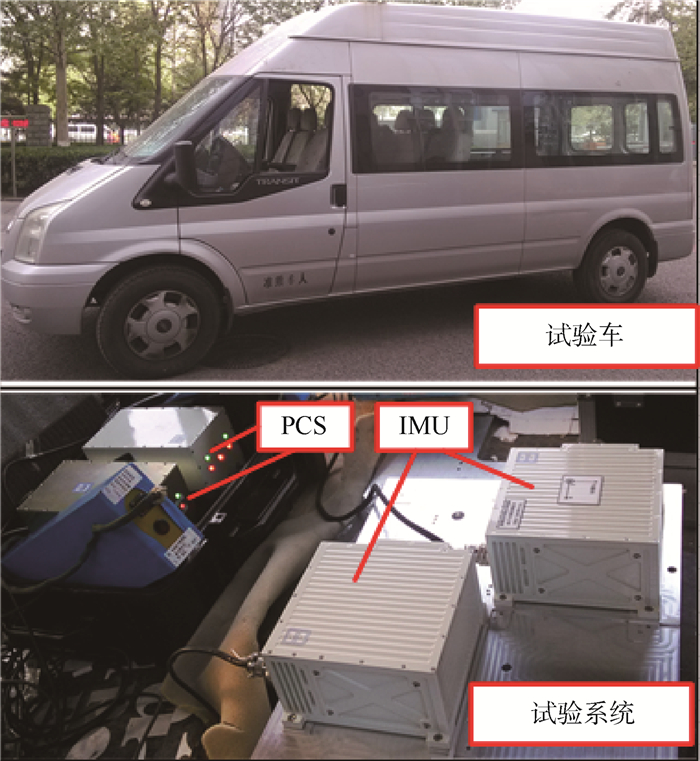
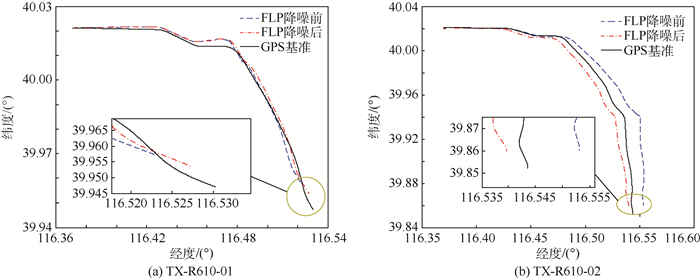
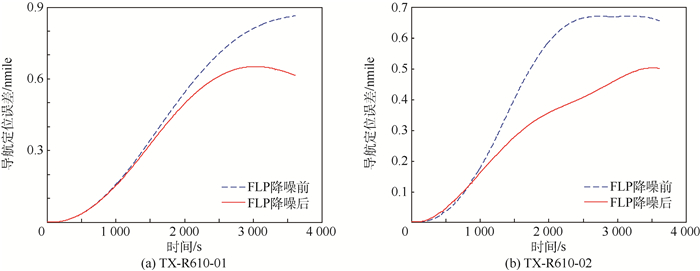
Ring laser gyro inertial measurement unit (IMU) encounters the problem of relatively large stochastic noise because of the strenuous dithering motion. The conventional calibration method eliminates the impact on the stochastic noise by extending the measurement time, which undoubtedly reduces the calibration efficiency. To solve the problem, the adaptive forward linear prediction (FLP) filter is adopted to suppress the stochastic noises of ring laser gyro IMU calibration data and improve the calibration accuracy of the system with small amount of calibration data. Firstly, the original data is acquired from the four-position rotation calibration experiment. Secondly, the calibration data is de-noised by the adaptive FLP filter to improve its signal noise ratio (SNR). Finally, the calibration parameters are calculated with the de-noised data. The experimental results show that the stochastic noises of calibration data are de-noised effectively by the adaptive FLP filter, the SNR of the signal is improved, and more accurate calibration parameters are acquired with small amount of calibration data, which enhances the navigation accuracy of the system.

| [1] |
王琛琛, 王新龙.机抖激光陀螺误差输出特性的分析[J].北京航空航天大学学报, 2013, 39(4):521-524. http://bhxb.buaa.edu.cn/CN/abstract/abstract12594.shtml
WANG C C, WANG X L.Analysis of error output characteristics of DRLG[J].Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(4):521-524(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract12594.shtml
|
| [2] |
LI J, FANG J, GE S S.Kinetics and design of a mechanically dithered ring laser gyroscope position and orientation system[J].IEEE Transactions on Instrumentation & Measurement, 2013, 62(1):210-220. http://ieeexplore.ieee.org/document/6295655/
|
| [3] |
FANG J, CHEN L, YAO J.An accurate gravity compensation method for high-precision airborne POS[J].IEEE Transactions on Geoscience & Remote Sensing, 2014, 52(8):4564-4573. http://ieeexplore.ieee.org/document/6679265/
|
| [4] |
程骏超, 房建成, 吴伟仁, 等.一种激光陀螺惯性测量单元混合标定方法[J].中国惯性技术学报, 2014, 22(4):445-452. doi: 10.13695/j.cnki.12-1222/o3.2014.04.005.html
CHENG J C, FANG J C, WU W R, et al.Integrated calibration method for RLG IMU[J].Journal of Chinese Inertial Technology, 2014, 22(4):445-452(in Chinese). doi: 10.13695/j.cnki.12-1222/o3.2014.04.005.html
|
| [5] |
LI J, JIAO F, FANG J, et al.Integrated calibration method for dithered RLG POS using a hybrid analytic/Kalman filter approach[J].IEEE Transactions on Instrumentation & Measurement, 2013, 62(12):3333-3342. http://ieeexplore.ieee.org/document/6568897/
|
| [6] |
李建利, 房建成, 马艳海, 等.INS全温六方位速率标定及分段线性插值补偿[J].北京航空航天大学学报, 2012, 38(10):1331-1335. http://bhxb.buaa.edu.cn/CN/abstract/abstract12419.shtml
LI J L, FANG J C, MA Y H, et al.Six-position rotation rate calibration and piecewise linear interpolation compensation for INS in full temperatures[J].Journal of Beijing University of Aeronautics and Astronautics, 2012, 38(10):1331-1335(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract12419.shtml
|
| [7] |
SANG M S, LEE J G, CHAN G P.Equivalent ARMA model representation for RLG random errors[J].IEEE Transactions on Aerospace & Electronic Systems, 2000, 36(1):286-290. http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=826331
|
| [8] |
HAN S, WANG J.Quantization and colored noises error modeling for inertial sensors for GPS/INS integration[J].IEEE Sensors Journal, 2011, 11(6):1493-1503. doi: 10.1109/JSEN.2010.2093878
|
| [9] |
钟麦英, 闫东坤.激光陀螺POS惯性数据滤波及时延补偿[J].中国惯性技术学报, 2011, 19(6):670-675. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zggxjsxb201106008
ZHONG M Y, YAN D K.Predictive filtering and delay compensation of RLG position and orientation system[J].Journal of Chinese Inertial Technology, 2011, 19(6):670-675(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zggxjsxb201106008
|
| [10] |
李建利, 陈安升, 钟麦英, 等.基于线性相位无限长单位冲击响应滤波器的机抖激光陀螺POS低时延降噪方法[J].中国惯性技术学报, 2012, 20(6):644-649. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zggxjsxb201206006
LI J L, CHEN A S, ZHONG M Y, et al.Low time delay de-noising method for mechanically dithered RLG POS based on linear phase infinite impulse response filter[J].Journal of Chinese Inertial Technology, 2012, 20(6):644-649(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zggxjsxb201206006
|
| [11] |
高伟, 祖悦, 王伟, 等.基于二代小波的光纤陀螺实时降噪方法研究[J].仪器仪表学报, 2012, 33(4):774-780. http://mall.cnki.net/magazine/Article/YQXB201204009.htm
GAO W, ZU Y, WANG W, et al.Research on real-time de-noising of FOG based on second generation wavelet transform[J].Chinese Journal of Scientific Instrument, 2012, 33(4):774-780(in Chinese). http://mall.cnki.net/magazine/Article/YQXB201204009.htm
|
| [12] |
张通, 张骏, 张怡.基于改进小波阈值的激光陀螺漂移信号降噪[J].仪器仪表学报, 2011, 32(2):258-263. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=yqyb201102004
ZHANG T, ZHANG J, ZHANG Y.Ring laser gyro drift signal denoising based on improved wavelet threshold[J].Chinese Journal of Scientific Instrument, 2011, 32(2):258-263(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=yqyb201102004
|
| [13] |
陈熙源, 许常燕.基于前向线性预测算法的光纤陀螺零漂的神经网络建模[J].中国惯性技术学报, 2007, 15(3):334-337. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zggxjsxb200703017
CHEN X Y, XU C Y.Neural network modeling for FOG zero point drift based on forward linear prediction algorithm[J].Journal of Chinese Inertial Technology, 2007, 15(3):334-337(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zggxjsxb200703017
|
| [14] |
易康, 李廷志, 吴文启.FLP滤波算法在光纤陀螺信号预处理中的应用[J].中国惯性技术学报, 2005, 13(5):58-62. http://mall.cnki.net/magazine/Article/ZGXJ200505012.htm
YI K, LI T Z, WU W Q.Application of forward linear prediction filter in signal process of FOG[J].Journal of Chinese Inertial Technology, 2005, 13(5):58-62(in Chinese). http://mall.cnki.net/magazine/Article/ZGXJ200505012.htm
|
| [15] |
NG L C, PINES D J.Characterization of ring laser gyro perfor-mance using the Allan variance method[J].Journal of Guidance Control & Dynamics, 2012, 20(1):211-214. https://www.mendeley.com/research-papers/characterization-ring-laser-gyro-performance-using-allan-variance-method/
|
| [16] |
SAVAGE P G.Analytical modeling of sensor quantization in strapdown inertial navigation error equations[J].Journal of Guidance Control & Dynamics, 2012, 25(5):833-842. https://www.mendeley.com/research-papers/analytical-modeling-sensor-quantization-strapdown-inertial-navigation-error-equations/
|
Figures(8) / Tables(3)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: