| Citation: | ZHU Chuangchuang, LIANG Xiaolong, ZHANG Jiaqiang, et al. Demonstration and verification system for UAV swarm formation control[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(8): 1739-1747. doi: 10.13700/j.bh.1001-5965.2017.0600(in Chinese)

|
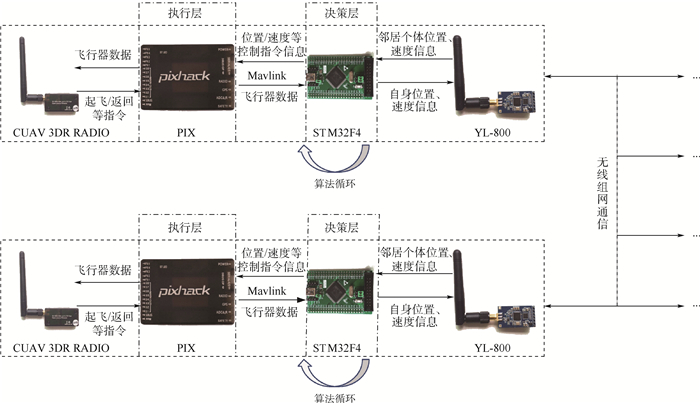
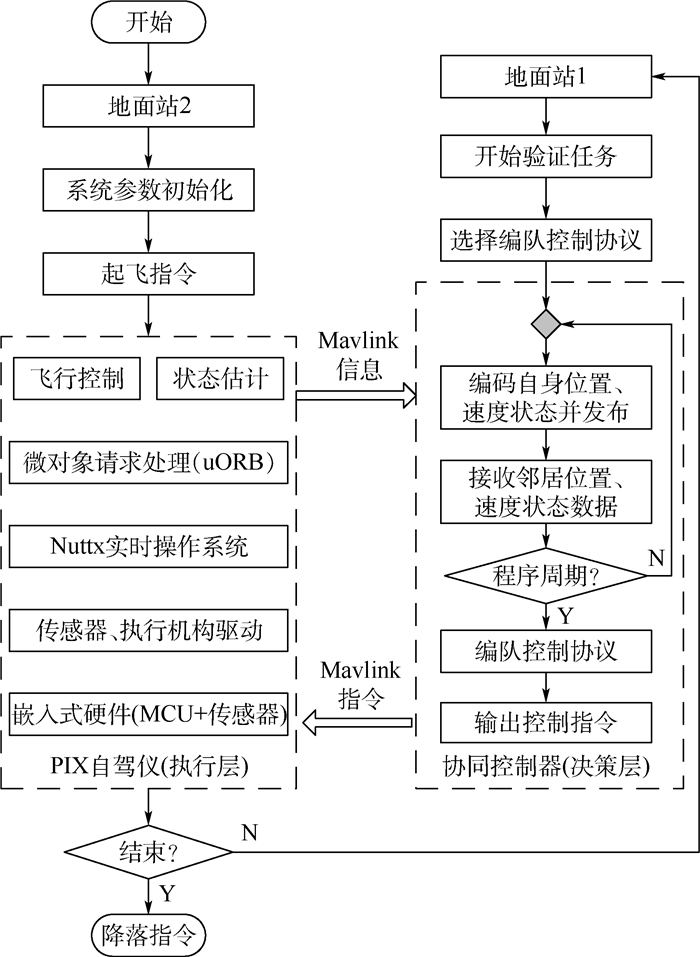
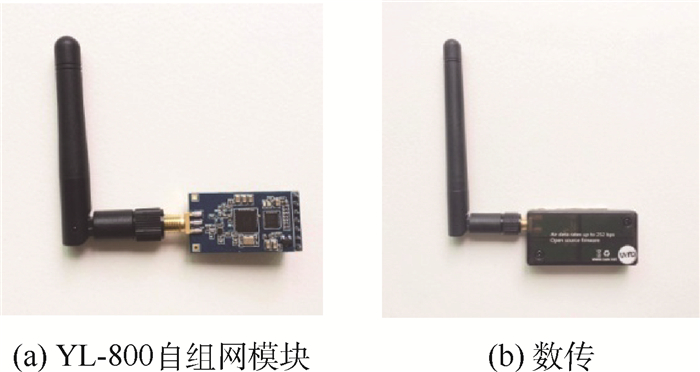
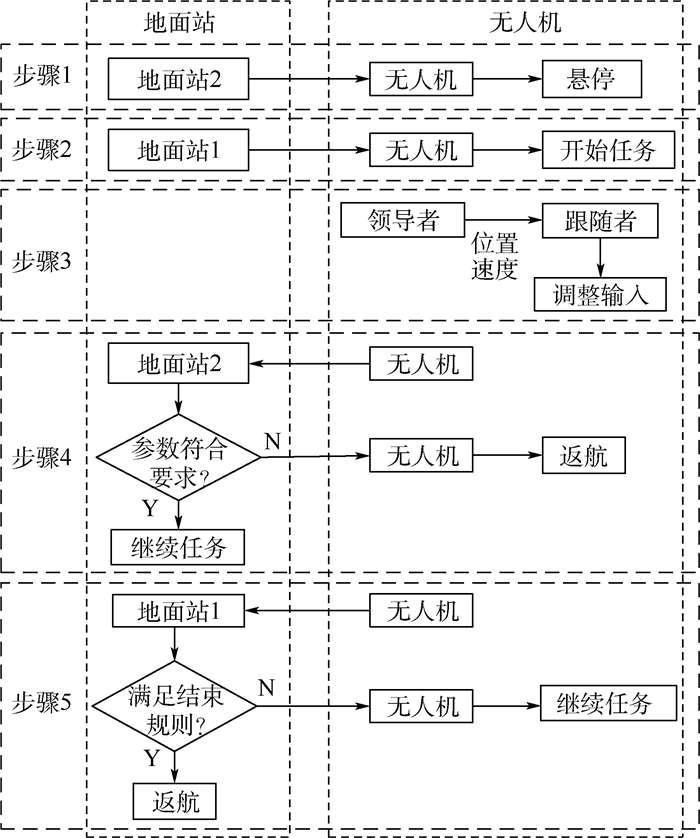
In order to verify the effectiveness of the formation control algorithms of UAV swarm in the actual environment, a distributed UAV swarm formation control demonstration and verification system consisting of UAV platform, two sets of ground station and data link was built under outdoor conditions. The control system of UAV was divided into executive layer and decision layer on the basis of the idea of hierarchical control and encapsulation. The PIX autopilot was encapsulated in the executive layer, and the control strategy of heterogeneous swarm can be realized only with autopilot parameter modification and without corresponding control strategy development for different UAV platforms. When the different control algorithms need to be verified, control algorithm for decision layer can be modified so that the system has strong adaptability and scalability. Two sets of ground control stations and data links are adopted, which can achieve the multi-UAV control under a variety of interaction topology or in the case of communication failure and ensure the system's robustness and security. The demonstration and verification system's function and performance are verified with the leader-follower synergy formation control algorithm.

| [1] |
牛轶峰, 肖湘江, 柯冠岩.无人机集群作战概念及关键技术分析[J].国防科技, 2013, 34(5):37-43. http://d.old.wanfangdata.com.cn/Periodical/gfkj201305007
NIU Y F, XIAO X J, KE G Y.Operation concept and key techniques of unmanned aerial vehicle swarm[J].National Defense Science and Technology, 2013, 34(5):37-43(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/gfkj201305007
|
| [2] |
袁政英.美空军未来20年小型无人机发展路线图[J].防务视点, 2016(10):58-59. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QKC20162016111800031112
YUAN Z Y.United states air force in the next 20 years the development of a small UAV roadmap[J].Defense Point, 2016(10):58-59(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QKC20162016111800031112
|
| [3] |
宗群, 王丹丹, 邵士凯, 等.多无人机协同编队飞行控制研究现状及发展[J].哈尔滨工业大学学报, 2017, 49(3):1-14. http://d.old.wanfangdata.com.cn/Periodical/hebgydxxb201703001
ZONG Q, WANG D D, SHAO S K, et al.Research status and development of multi UAV coordinated formation flight control[J].Journal of Harbin Institute of Technology, 2017, 49(3):1-14(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/hebgydxxb201703001
|
| [4] |
王祥科, 李迅, 郑志强.多智能体系统编队控制相关问题研究综述[J].控制与决策, 2013, 28(11):1601-1613. http://d.old.wanfangdata.com.cn/Periodical/kzyjc201311001
WANG X K, LI X, ZHENG Z Q.Survey of developments on multi-agent formation control related problems[J].Control and Decision, 2013, 28(11):1601-1613(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/kzyjc201311001
|
| [5] |
吴俊成, 周锐, 董卓宁, 等.基于诱导航线的多无人机编队飞行控制方法[J].北京航空航天大学学报, 2016, 42(7):1518-1525. http://bhxb.buaa.edu.cn/CN/abstract/abstract14011.shtml
WU J C, ZHOU R, DONG Z N, et al.Formation flight control method of multiple UAVs based on guidance route[J].Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(7):1518-1525(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract14011.shtml
|
| [6] |
KOWNACKI C.Multi-UAV flight using virtual structure combined with behavioral approach[J].Acta Mechanica et Automatic, 2016, 10(2):92-99. doi: 10.1515/ama-2016-0015
|
| [7] |
DUAN H B, LIU S Q.Non-linear dual-mode receding horizon control for multiple unmanned air vehicles formation flight based on chaotic particle swarm optimization[J].IET Control Theory and Applications, 2010, 4(11):2565-2578. doi: 10.1049/iet-cta.2009.0256
|
| [8] |
ROY N, NEWMAN P, SRINIVASA S.Towards a swarm of agile micro quadrotors[J].Autonomous Robots, 2013, 35(4):287-300. doi: 10.1007/s10514-013-9349-9
|
| [9] |
YOU D I, SHIM D H.Autonomous formation flight test of multi-micro aerial vehicles[J].Journal of Intelligent and Robotic Systems, 2011, 61(1-4):321-337. doi: 10.1007/s10846-010-9481-0
|
| [10] |
洪晔, 缪存孝, 雷旭升.基于长机-僚机模式的无人机编队方法及飞行实验研究[J].机器人, 2010, 32(4):505-509. http://d.old.wanfangdata.com.cn/Periodical/jqr201004010
HONG Y, MIAO C X, LEI X S.Formation method and flight test of multiple UAVs based on leader-follower pattern[J].Robot, 2010, 32(4):505-509(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jqr201004010
|
| [11] |
DONG X W, ZHOU Y, ZHANG R, et al.Time-varying formation control for unmanned aerial vehicles with switching interaction topologies[J].Control Engineering Practice, 2016, 46:26-36. doi: 10.1016/j.conengprac.2015.10.001
|
| [12] |
王勋, 张纪阳, 张代兵, 等.无人机编队飞行快速试验系统设计[J].机器人, 2017, 39(2):160-166. http://d.old.wanfangdata.com.cn/Periodical/jqr201702004
WANG X, ZHANG J Y, ZHANG D B, et al.Development of an experiment system for UAV formation flight[J].Robot, 2017, 39(2):160-166(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jqr201702004
|
| [13] |
JIANG C M, WAN L, SUN Y S.Design of S-plane controller of autonomous underwater vehicle established on sliding mode control[J].Journal of Harbin Institute of Technology (New Series), 2017, 24(2):58-64. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hebgydxxb-e201702008
|
| [14] |
CUI R, LI Y, YAN W.Mutual information-based multi-AUV path planning for scalar field sampling using multidimensional RRT*[J].IEEE Transactions on Systems Man & Cybernetics Systems, 2016, 46(7):993-1004.
|
| [15] |
张少苹, 戴锋, 王成志, 等.多Agent系统研究综述[J].复杂系统与复杂性科学, 2011, 8(4):1-7. doi: 10.3969/j.issn.1672-3813.2011.04.001
ZHANG S P, DAI F, WANG C Z, et al.Summary on research of multi-agent system[J].Complex System and Complex Science, 2011, 8(4):1-7(in Chinese). doi: 10.3969/j.issn.1672-3813.2011.04.001
|
| [16] |
QIN Z H, SUN H B, LIN Z. A hierarchical control strategy of autonomous unmanned surface vehicle swarm[C]//The 26th International Ocean and Polar Engineering Conference. Mountain View: International Society of Offshore and Polar Engineers, 2016: 474-479.
|
| [17] |
HE L L, BAI P, LIANG X L, et al.Feedback formation control of UAV swarm with multiple implicit leaders[J].Aerospace Science and Technology, 2018, 72:327-334. doi: 10.1016/j.ast.2017.11.020
|

Figures(10) / Tables(1)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: