| Citation: | ZHOU Rui, ZHOU Hui, GUI Heli, et al. Analysis and optimization of 2-DOF micro-positioning stage based on flexible hinges[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(9): 1982-1990. doi: 10.13700/j.bh.1001-5965.2017.0706(in Chinese)

|
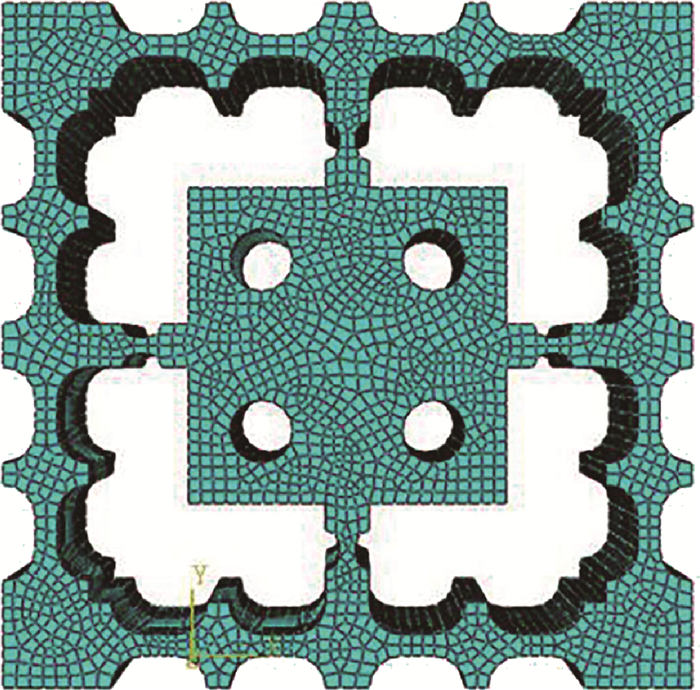
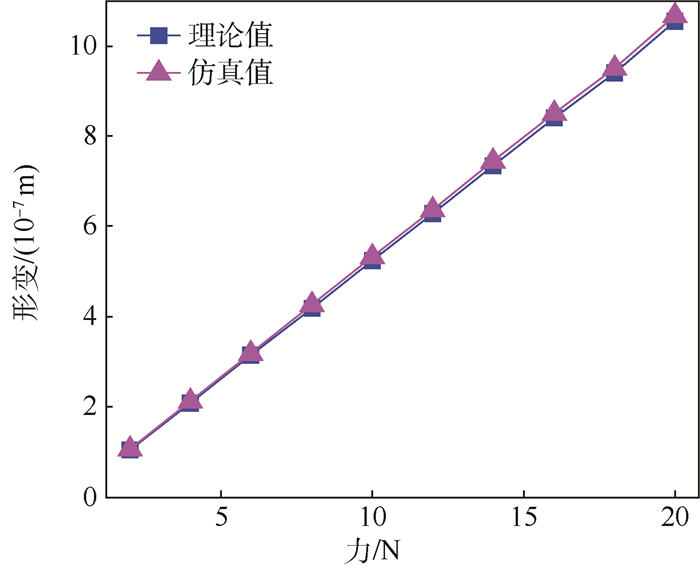
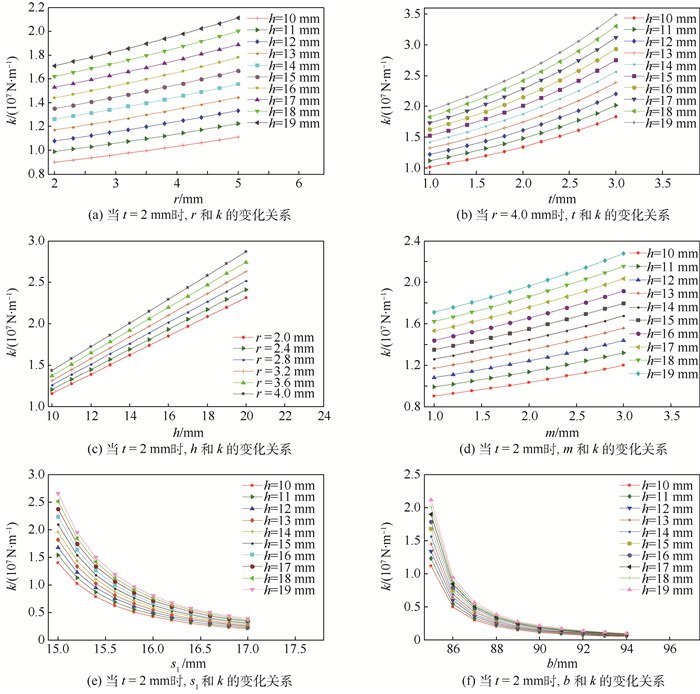
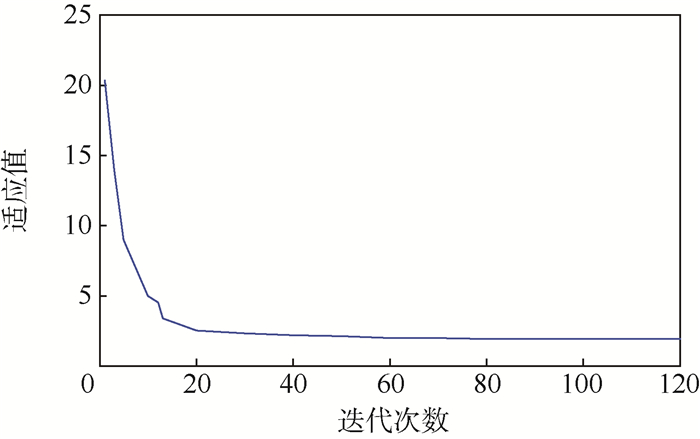
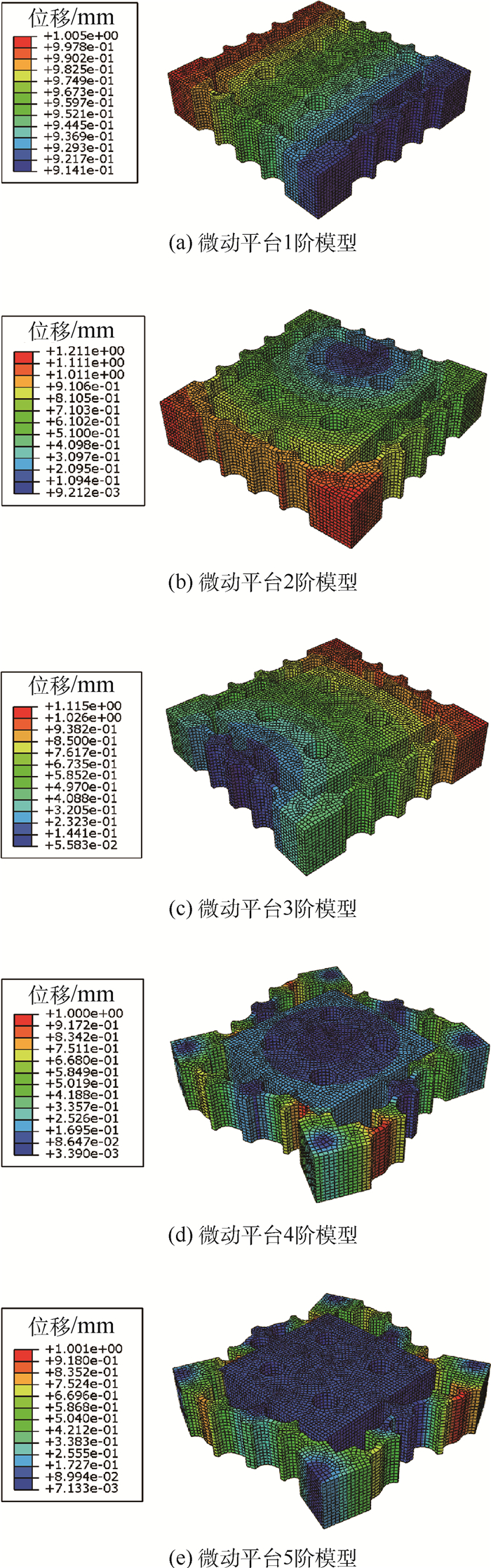
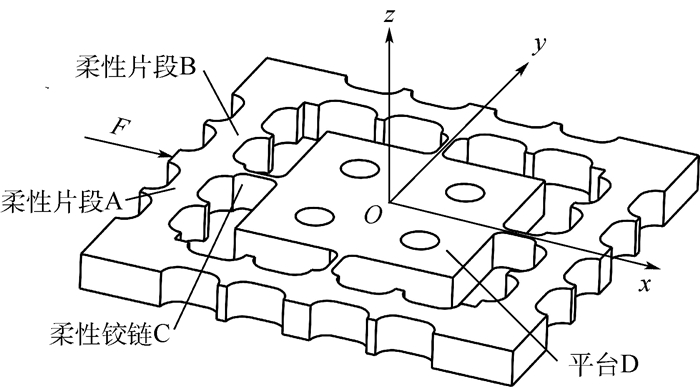
In order to improve the dynamic characteristics of the micro-positioning stage, a decoupled two-degree-of-freedom (2-DOF) parallel flexure-hinge micro-positioning stage is proposed. First, a new type of 2-DOF micro-positioning stage is designed based on the structure characteristics of the corner-filleted flexure hinge and micro-positioning stage. Second, the equivalent stiffness model of the micro-positioning stage is deduced, and the correctness of the theoretical model is verified by comparing the theoretical results with the finite element simulation. And at the same time, the influence of different structural parameters on micro-positioning stage is discussed, and the sensitivity comparison and analysis are conducted. Then, to improve the 2-DOF micro-positioning platform equivalent stiffness as the goal, the optimization model is established, and the adaptive particle swarm optimization algorithm is used to optimize the main structure parameters of the micro-positioning stage. Finally, the natural frequency of the stage is calculated, and its correctness is verified by finite element simulation. The above analysis proves the feasibility and effectiveness of the mechanism.

| [1] |
LIU P B, YAN P, ZHANG Z, et al.Flexure hinges guided nano-stage for precision manipultions:Design, modeling and control[J].Precision Engineering and Manufacturing, 2015, 16(11):2245-2254. doi: 10.1007/s12541-015-0289-5
|
| [2] |
刘凯, 曹毅, 周睿, 等.二自由度平板折展柔性铰链的分析及优化[J].航空学报, 2016, 36(1):142-152. http://d.old.wanfangdata.com.cn/Periodical/hkxb201702028
LIU K, CAO Y, ZHOU R, et al.Analysis and optimization of a 2-DoF flexure hinge[J].Acta Aeronautica et Astronautica Sinica, 2016, 36(1):142-152(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/hkxb201702028
|
| [3] |
CHOI E, KWON K, DAEJOONG K, et al.Tunable reverse electrodialysis with geometrically controlled self-assembled nanoparticle network[J].Lab on A Chip, 2015, 15(1):168-178. doi: 10.1039/C4LC01031K
|
| [4] |
马立, 谢炜, 刘波, 等.柔性铰链微定位平台的设计[J].光学精密工程, 2014, 22(2):338-345. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201402014
MA L, XIE W, LIU B, et al.Design of flexible sources positioning platform[J].Optics and Precision Engineering, 2014, 22(2):338-345(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201402014
|
| [5] |
王振华, 陈立国, 孙立宁.集成式6自由度微动并联机器人系统[J].光学精密工程, 2007, 15(9):1391-1397. doi: 10.3321/j.issn:1004-924x.2007.09.014
WANG Z H, CHEN L G, SUN L N.Integrated 6-DoF micro-motion parallel robot system[J].Optics and Precision Engineering, 2007, 15(9):1391-1397(in Chinese). doi: 10.3321/j.issn:1004-924x.2007.09.014
|
| [6] |
LAI L J, GU G Y, ZHU L M.Design and control of a decoupled two degree of freedom translational parallel micro-positioning stage[J].Review of Scientific Instruments, 2012, 83(4):105-111. https://www.researchgate.net/publication/224912161_Design_and_control_of_a_decoupled_two_degree_of_freedom_translational_parallel_micro-positioning_stage
|
| [7] |
LI Y M, WU Z G.Design, analysis and simulation of a novel 3-DoF translational micro manipulator based on the PRB model[J].Mechanism and Machine Theory, 2016, 100(3):235-258. https://www.researchgate.net/publication/220103687_Design_analysis_and_stiffness_optimization_of_a_three_degree_of_freedom_parallel_manipulator
|
| [8] |
陶惠峰.超精密微位移系统研究[D].杭州: 浙江大学, 2003: 1-7.
TAO H F.Research on ultra-precision micro displacement system[D].Hangzhou: Zhejiang University, 2003: 1-7(in Chinese).
|
| [9] |
刘庆玲, 翁海珊, 邱丽芳.新型单边直圆椭圆混合柔性铰链的柔度计算及其性能分析[J].工程力学, 2010, 27(10):52-56. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201002473014
LIU Q L, WENG H S, QIU L F.Flexibility calculation and performance analysis of a new Unilateral elliptical hybrid flexure hinge[J].Engineering Mechanics, 2010, 27(10):52-56(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201002473014
|
| [10] |
任宁, 田国豪, 欧开良, 等.倒圆角直梁型柔性铰链刚度研究[J].机械强度, 2012, 34(3):366-370. http://d.old.wanfangdata.com.cn/Periodical/jxqd201203010
REN N, TIAN G H, OU K L, et al.Study on the stiffness of inverted fillet flexible hinge[J].Mechanical Strength, 2012, 34(3):366-370(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jxqd201203010
|
| [11] |
BHAGAT U, SHIRINZADEH B, CLARK L, et al.Design and analysis of a novel flexure-based 3-DOF mechanism[J].Mechanism and Machine Theory, 2014, 74(2):173-187. https://www.sciencedirect.com/science/article/pii/S0094114X13002498
|
| [12] |
GUO Z L Tat J T, YANG G L, et al.Integrating mechanism synthesis and topological optimization technique for stiffness-oriented design of a three degrees-of-freedom flexure-based parallel mechanism[J].Precision Engineering, 2015, 39(5):125-133. https://www.journals.elsevier.com/precision-engineering/most-cited-articles/
|
| [13] |
GAO P, SWEI S M, YUAN Z.A new piezodriven precision micropositioning stage utilizing flexure hinges[J].Nanoteehnology, 1999, 10(4), 394-398. doi: 10.1088/0957-4484/10/4/306
|
| [14] |
陈贵敏, 贾建援, 勾燕洁.混合型柔性铰链研究[J].仪器仪表学报, 2004, 25(4):110-112. http://d.old.wanfangdata.com.cn/Periodical/yqyb2004z3037
CHEN G M, JIA J Y, GOU Y J.Study on hybrid flexible hinge[J].Chinese Journal of Scientific Instrument, 2004, 25(4):110-112(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/yqyb2004z3037
|
| [15] |
沈剑英, 张海军, 赵云.压电陶瓷驱动器杠杆式柔性铰链机构放大率计算方法[J].农业机械学报, 2013, 44(9):267-271. http://d.old.wanfangdata.com.cn/Periodical/nyjxxb201309046
SHEN J Y, ZHANG H J, ZHAO Y.Calculation method of magnification of lever-type flexible hinge mechanism of piezoelectric ceramic actuator[J].Transactions of the Chinese Society of Agricultural Machinery, 2013, 44(9):267-271(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/nyjxxb201309046
|
| [16] |
LI Y M, XIAO S L, XI L Q, et al.Design, modeling, control and experiment for a 2-DOF compliant micro-motion stage[J].Precision Engineering and Manufacturing, 2014, 15(4):735-744. doi: 10.1007/s12541-014-0394-x
|
| [17] |
田延岭, 张大卫, 闫兵.二自由度微定位平台的研制[J].光学精密工程, 2006, 14(1):94-99. doi: 10.3321/j.issn:1004-924X.2006.01.017
TIAN Y L, ZHANG D W, YAN B.Development of 2-DOF micro positioning platform[J].Optics and Precision Engineering, 2006, 14(1):94-99(in Chinese). doi: 10.3321/j.issn:1004-924X.2006.01.017
|
| [18] |
崔玉国, 阮超, 马剑强, 等.2-DoF并联柔性结构微动平台的新构型及尺寸优化[J].机器人, 2016, 38(3):352-359. http://d.old.wanfangdata.com.cn/Periodical/jqr201603012
CUI Y G, RUAN C, MA J Q, et al.New configuration and dimension optimization of jogging parallel flexible structure platform[J].Robot, 2016, 38(3):352-359(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jqr201603012
|
| [19] |
李仕华, 韩雪艳, 马琦翔, 等.新型并联柔性铰链微动精密平台的研究[J].中国机械工程, 2016, 27(7):888-893. doi: 10.3969/j.issn.1004-132X.2016.07.007
LI S H, HAN X Y, MA Q X, et al.Research on jogging precision platform of new type of parallel flexible hinge[J].China Mechanical Engineering, 2016, 27(7):888-893(in Chinese). doi: 10.3969/j.issn.1004-132X.2016.07.007
|
| [20] |
徐刚, 瞿金平, 杨智韬.一种改进的自适应粒子群优化算法[J].华南理工大学学报, 2008, 36(9):6-10. doi: 10.3321/j.issn:1000-565X.2008.09.002
XU G, QU J P, YANG Z T.An improved self-adaptive particle swarm optimization algorithm[J].Journal of South China University of Technology, 2008, 36(9):6-10(in Chinese). doi: 10.3321/j.issn:1000-565X.2008.09.002
|
| [21] |
李宝磊, 施心陵, 苟常兴, 等.多元优化算法及其收敛性分析[J].自动化学报, 2015, 41(5):949-959. http://d.old.wanfangdata.com.cn/Periodical/zdhxb201505009
LI B L, SHI X L, GOU C X, et al.Multivariate optimization algorithm and its convergence analysis[J].Acta Automatica Sinica, 2015, 41(5):949-959(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/zdhxb201505009
|
| [22] |
郭明陆.压电陶瓷驱动的微纳定位平台系统研究[D].沈阳: 东北大学, 2014: 21-35.
GUO M L.Study on micro-nano positioning platform driven by piezoelectric ceramics[D].Shenyang: Northeastern University, 2014: 21-35(in Chinese).
|
Figures(10) / Tables(4)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: