| Citation: | ZHANG Jianjun, LIU Weidong, GAO Li'e, et al. Adaptive bilateral control for underwater manipulator in uncertainty teleoperation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(9): 1918-1925. doi: 10.13700/j.bh.1001-5965.2017.0753(in Chinese)

|
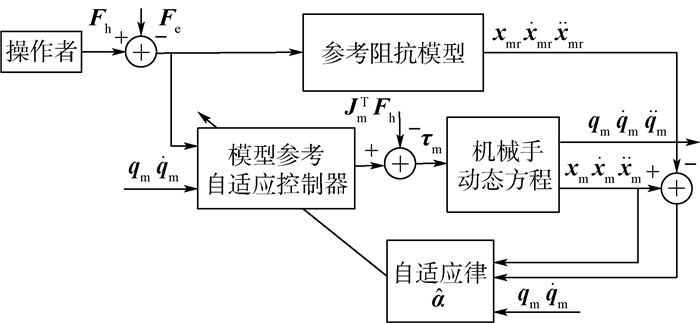
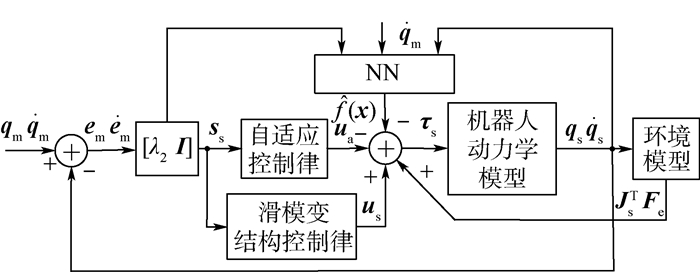
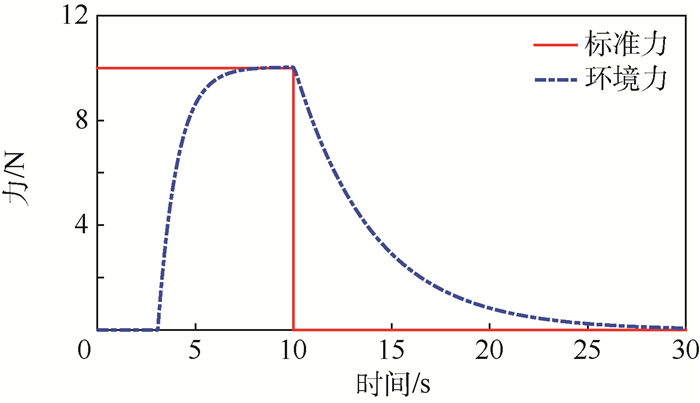
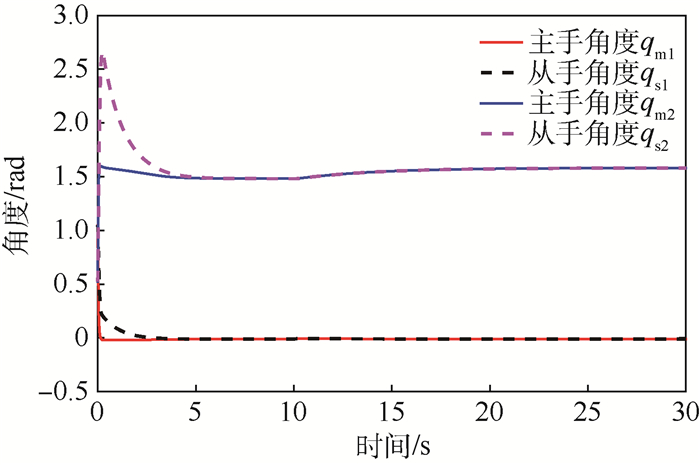
An adaptive bilateral control strategy is proposed for the uncertainty of the mathematical model and external disturbances during the teleoperation of underwater manipulator. A reference adaptive impedance control law based on the nominal model is designed for the uncertainty of the parameters of the master manipulator model and the external disturbance. The reference position of the expected model is adjusted by the deviation between the force of operator and the slave manipulator, and the model uncertainty is compensated by the adaptive control law. Aimed at the uncertainty of slave manipulator, the adaptive compensation is achieved by the radial basis function (RBF) neural network, and the approximation deviation is eliminated by the design of the sliding mode variable structure controller and the robust adaptive controller, which satisfies the position tracking of the slave manipulator to the master manipulator. The tracking performance and global stability are proved by Lyapunov function, and the asymptotic convergence of force-position tracking is guaranteed. The results show that the overall controller has good force-position tracking ability under the conditions of model uncertainty and external disturbance. The whole system is stable and feasible, and has robustness and adaptive control ability.
| [1] |
LI Y, JOHANSSON R, LIU K, et al.Guaranteed cost control design for delayed teleoperation systems[J].Journal of the Franklin Institute, 2015, 352(11):5085-5105. doi: 10.1016/j.jfranklin.2015.08.011
|
| [2] |
贾鹤鸣, 张利军, 齐雪, 等.基于神经网络的水下机器人三维航迹跟踪控制[J].控制理论与应用, 2012, 29(7):56-62.
JIA H M, ZHANG L J, QI X, et al.Three-dimensional path tracking control for autonomous underwater vehicle based on neural network[J].Control Theory & Applications, 2012, 29(7):56-62(in Chinese).
|
| [3] |
WANG H, XIE Y.Adaptive inverse dynamics control of robots with uncertain kinematics and dynamics[J].Automatica, 2009, 45(9):2114-2119. doi: 10.1016/j.automatica.2009.05.011
|
| [4] |
张文辉, 齐乃明, 尹洪亮.基于滑模变结构的空间机器人神经网络跟踪控制[J].控制理论与应用, 2011, 28(9):1141-1144.
ZHANG W H, QI N M, YIN H L.Neural-network tracking control of space robot based on sliding-mode variable structure[J].Control Theory & Applications, 2011, 28(9):1141-1144(in Chinese).
|
| [5] |
GANJEFAR S, REZAEI S, HASHEMZADEH F.Position and force tracking in nonlinear teleoperation systems with sandwich linearity in actuators and time-varying delay[J].Mechanical Systems and Signal Processing, 2017, 86:308-324. doi: 10.1016/j.ymssp.2016.09.023
|
| [6] |
LIU Y C, KHONG M H.Adaptive control for nonlinear teleoperators with uncertain kinematics and dynamics[J].IEEE/ASME Transactions on Mechatronics, 2015, 20(5):2550-2562. doi: 10.1109/TMECH.2015.2388555
|
| [7] |
HOSSEINI S K, MOMENI H, JANABI S F, et al.A modified adaptive controller design for teleoperation systems[J].Robotics and Autonomous Systems, 2010, 58(5):676-683. doi: 10.1016/j.robot.2009.11.006
|
| [8] |
LIU X, TAVAKOLI M.Adaptive control of teleoperation systems with linearly and nonlinearly parameterized dynamic uncertainties[J].Journal of Dynamic Systems Measurement & Control, 2012, 134(2):194-203.
|
| [9] |
CHOPRA N, SPONG M W, LOZANO R.Synchronization of bilateral teleoperators with time delay[J].Automatica, 2008, 44(8):2142-2148. doi: 10.1016/j.automatica.2007.12.002
|
| [10] |
NUN~O E, SARRAS I, BASAN~EZ L, et al.Control of teleoperators with joint flexibility, uncertain parameters and time-delays[J].Robotics and Autonomous Systems, 2014, 62(12):1691-1701. doi: 10.1016/j.robot.2014.08.003
|
| [11] |
HUA C C, YANG Y, GUAN X.Neural network-based adaptive position tracking control for bilateral teleoperation under constant time delay[J].Neuro Computing, 2013, 113(7):204-212.
|
| [12] |
WANG H.Passivity based synchronization for networked robotic systems with uncertain kinematics and dynamics[J].Automatica, 2013, 49(3):755-761. doi: 10.1016/j.automatica.2012.11.003
|
| [13] |
KIM B Y, AHN H S.A design of bilateral teleoperation systems using composite adaptive controller[J].Control Engineering Practice, 2013, 21(12):1641-1652. doi: 10.1016/j.conengprac.2013.08.013
|
| [14] |
SHARIFI M, BEHZADIPOUR S, VOSSOUGHI G.Nonlinear model reference adaptive impedance control for human-robot interactions[J].Control Engineering Practice, 2014, 32:9-27. doi: 10.1016/j.conengprac.2014.07.001
|
| [15] |
MENDOZA M, BONILLA I, GONZÁLEZ-GALVÁN E, et al.Impedance control in a wave-based teleoperator for rehabilitation motor therapies assisted by robots[J].Computer Methods & Programs in Biomedicine, 2016, 123(C):54-67.
|
| [16] |
SHARIFI M, BEHZADIPOUR S, VOSSOUGHI G R.Model reference adaptive impedance control of rehabilitation robots in operational space[C]//IEEE Ras & Embs International Conference on Biomedical Robotics and Biomechatronics.Piscataway, NJ: IEEE Press, 2012: 1698-1703.
|
| [17] |
HSU C F, LIN C M, YEH R G.Supervisory adaptive dynamic RBF-based neural-fuzzy control system design for unknown nonlinear systems[J].Applied Soft Computing Journal, 2013, 13(4):1620-1626. doi: 10.1016/j.asoc.2012.12.028
|
| [18] |
PAN Y, YU H, ER M J.Adaptive neural PD control with semiglobal asymptotic stabilization guarantee[J].IEEE Transactions on Neural Networks & Learning Systems, 2014, 25(12):2264-2274.
|
| [19] |
LONDHE P S, MOHAN S, PATRE B M, et al.Robust task-space control of an autonomous underwater vehicle-manipulator system by PID-like fuzzy control scheme with disturbance estimator[J].Ocean Engineering, 2017, 139:1-13. doi: 10.1016/j.oceaneng.2017.04.030
|
| [20] |
张文辉, 齐乃明, 尹洪亮.自适应神经变结构的机器人轨迹跟踪控制[J].控制与决策, 2011, 26(4):597-600.
ZHANG W H, QI N M, YIN H L.Neural-variable structure-based adaptive trajectory tracking control of robot manipulators[J].Control and Decision, 2011, 26(4):597-600(in Chinese).
|
| [1] | LI J,YANG D K,HONG X B,et al. Soil moisture algorithm testing of interference signal inversion with GNSS linearly polarized antenna[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(3):874-885 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0282. |
| [2] | CHEN Yong, ZHOU FangChun, DONG Ke. Dual discriminator fusion of infrared and visible light images for visual saliency enhancement[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0072 |
| [3] | CAI H,SHI P. Attitude control method for flexible spacecraft based on LPV model[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(12):3921-3929 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0880. |
| [4] | XIAO Yao, CHEN Dengkai, ZHOU Yao, XIAO Jianghao, HOU Yuhong. BN-based comprehensive evaluation model for display interface usability in civil aircraft cockpit[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0627 |
| [5] | WANG Yiqiang, YANG Xin. Study on the improvement of economical level of repair analysis model with multi-indenture and multi-echelon for civil aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0359 |
| [6] | WANG Dequan, ZHAO Yuxuan, YUAN Xiangyue, WANG Qingchun, CHEN Zhongjia. Design and simulation of large composite material curing furnace based on flow field uniformity[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0370 |
| [7] | ZHANG Fan, LIU Wan, GUO Yong-yan, CENG Zhi-chun, HE Qian-wei, ZHAO Zhong. The application and practice of black box testing technology in Fluid Simulation Software[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0621 |
| [8] | TIAN Gui-shuang, WANG Shao-ping, SHI Jian. Reliability model and lifetime prediction for train traction system considering multiple dependent components[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0797 |
| [9] | CAI Y,SI Y H,WANG Y Z,et al. Design and application of EMD-ARIMA drift model for flexible gyro[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(11):3434-3444 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0871. |
| [10] | CHANG Ju, LIU Xiao-dong, HE Ying. Complex equipment cost estimation model based on similarity weight[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0840 |
| [11] | ZHONG J,LUO C,ZHANG H,et al. Flight data anomaly detection based on correlation parameter selection[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(5):1738-1745 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0574. |
| [12] | YUAN Jia-hui, CHEN Shui-fu, XIA Yu-chao, LIU Yi. Spatial correlation of along-wind fluctuating wind loads on rectangular high-rise buildings[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0828 |
| [13] | SHI X D,LI R P,ZHAO H X,et al. Non-standard interface aviation RF cable test method based on TRL[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(9):2207-2217 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0645. |
| [14] | YANG B,HE Y Z,XU F,et al. Using improved genetic algorithm for software fault localization aided test case generation[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(9):2279-2288 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0524. |
| [15] | CHENG B P,FANG Y W,PENG W S,et al. Comprehensive performance evaluation of swarm intelligence algorithms based on improved radar graph method[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(10):2780-2789 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0726. |
| [16] | GUAN S Y,ZHANG C,MENG C,et al. Vascular ultrasound image segmentation algorithm based on phase symmetry[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(10):2645-2650 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0696. |
| [17] | JIANG L,DAI N,XU M,et al. Saliency-guided image translation[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(10):2689-2698 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0732. |
| [18] | WANG L Y,CHEN W H,JIANG Y S,et al. Measurement of ejection factor of new resin matrix composites[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(11):2960-2967 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0056. |
| [19] | LI Zhi-hong, WANG Jing-dong, ZHANG Yi-teng, WU Wen-min, LIU Yuan. Research on orthogonality and mounting matrix calibration of high precision vector magnetometer[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0675 |
| [20] | ZHAO Yue-qing, LIN De-zhi, CHEN Hui, TANG Jia-li, CHEN Ping. Performance test and constitutive model selection of diaphragms in hot diaphragm forming[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0350 |

Figures(8)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

ZHANG Pei-hong, JIA Hong-yin, ZHAO Jiao, et al. Numerical simulation research on opposing jet interaction characteristics of rocket inverse flight[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0710(in Chinese)






 DownLoad:
DownLoad: