| Citation: | SHEN Qiang, LIU Jieyu, ZHAO Qian, et al. RCC-OBE estimation fusion approach for MEMS gyro array[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(11): 2373-2379. doi: 10.13700/j.bh.1001-5965.2018.0091(in Chinese)

|
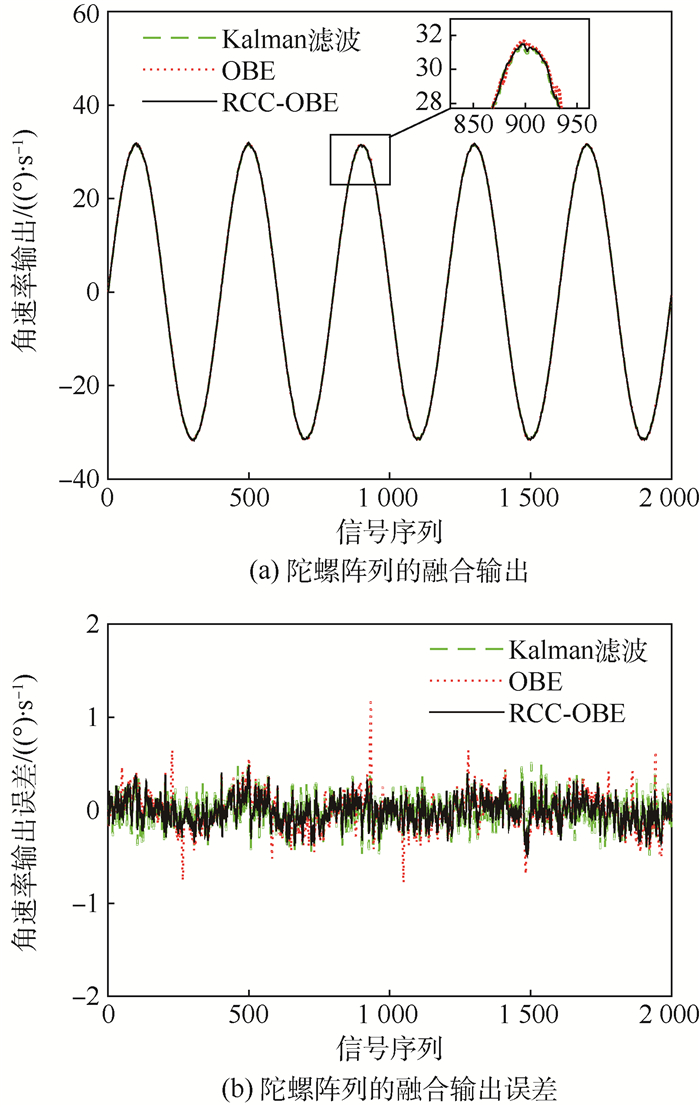
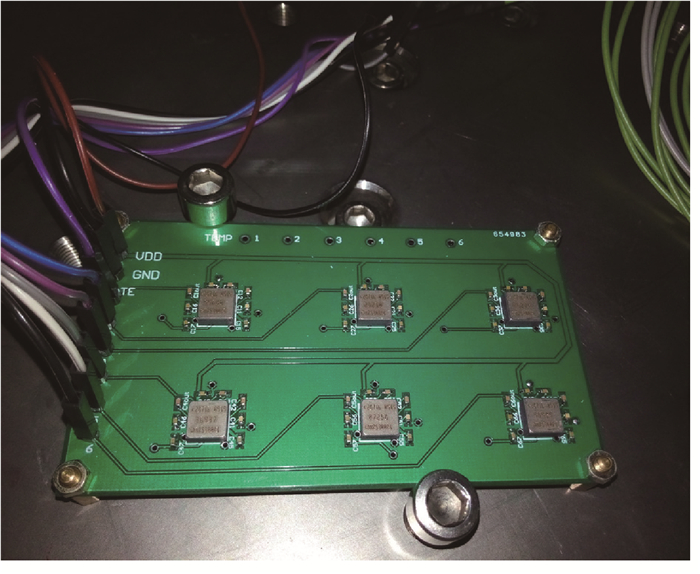
In order to improve the accuracy of micro-electro-mechanical system (MEMS) gyro, an optimal bounding ellipsoid (OBE) algorithm based on relaxed Chebyshev center (RCC) is proposed and used to fuse gyro array signals. On the basis of the error model of single gyro, the maneuvering fusion model of the array system is established. Because of the uncertainty of the noise statistics, the accuracy of the traditional fusion method is reduced. The set-membership estimation theory with unknown but bounded disturbances is introduced and the OBE algorithm is used to achieve the robust estimation of the angular rate. In the OBE algorithm, the ellipsoid geometry center is often used as the point estimate of the true value, but it is not optimal theoretically. The Chebyshev center of the feasible set has many excellent features. Meanwhile, considering that it is very difficult to solve the exact Chebyshev center, the relaxed Chebyshev center is used as a substitute for the point estimate of the true angular rate. Then an OBE update process with RCC as output is designed and a novel parameter optimization criterion is proposed. The verification experiment is performed by using a gyro array composed by six gyroscopes. The experimental results show that the estimation fusion method based on the proposed algorithm can obtain the angle rate guaranteed boundary and further improve the MEMS gyroscope accuracy.

| [1] |
KIM D, M'CLOSKEY R T.Spectral analysis of vibratory gyro noise[J].IEEE Sensors Journal, 2013, 13(11):4361-4374. doi: 10.1109/JSEN.2013.2269797
|
| [2] |
王鼎杰, 王广才, 吴杰.微惯性/卫星组合导航高精度事后基准确定方法[J].中国惯性技术学报, 2017, 25(1):97-102. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zggxjsxb201701020
WANG D J, WANG G C, WU J.Fixed-interval smoothing post-processing algorithm for low-cost MEMS-based integrated navigation system[J].Journal of Chinese Intertial Technology, 2017, 25(1):97-102(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zggxjsxb201701020
|
| [3] |
郝燕玲, 刘博, 史宏洋.新型反相位驱动双解耦微机械陀螺设计[J].哈尔滨工业大学学报, 2014, 46(9):105-110. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hebgydxxb201409019
HAO Y L, LIU B, SHI H Y.The novel design of anti-phase double-decoupled micromachined gyroscope[J].Journal of Harbin Institute of Technology, 2014, 46(9):105-110(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hebgydxxb201409019
|
| [4] |
BAYARD D S, PLOEN S R.High accuracy inertial sensors from inexpensive components: US patent, 6882964[P].2005-04-19.
|
| [5] |
CHANG H L, XUE L, QIN W, et al.An integrated MEMS gyroscope array with higher accuracy output[J].Sensors, 2008, 8(4):2886-2899. doi: 10.3390/s8042886
|
| [6] |
吉训生, 王寿荣.硅微陀螺阵列信号处理技术研究[J].宇航学报, 2009, 30(1):235-239. doi: 10.3873/j.issn.1000-1328.2009.00.041
JI X S, WANG S R.Research on signal procession of silicon micro-gyroscope array[J].Journal of Astronautics, 2009, 30(1):235-239(in Chinese). doi: 10.3873/j.issn.1000-1328.2009.00.041
|
| [7] |
XUE L, JIANG C Y, CHANG H L, et al.A novel Kalman filter for combining outputs of MEMS gyroscope array[J].Measurement, 2012, 12(1):745-754. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=fb35252378dc9299af167bc33781ada1
|
| [8] |
XUE L, JIANG C Y, WANG L X, et al.Noise reduction of MEMS gyroscope based on direct modeling for an angular rate signal[J].Micromachines, 2015, 6(2):266-280. doi: 10.3390/mi6020266
|
| [9] |
LIU J Y, SHEN Q, QIN W W.Signal processing technique for combining numerous MEMS gyroscopes based on dynamic conditional correlation[J].Micromachines, 2015, 6(6):684-698. doi: 10.3390/mi6060684
|
| [10] |
VACCARO R J, ZAKI A S.Reduced-drift virtual gyro from an array of low-cost gyros[J].Sensors, 2017, 17(2):352. doi: 10.3390/s17020352
|
| [11] |
LE B F, SLIWKA J, JAULIN L, et al.Set-membership state estimation with fleeting data[J].Automatica, 2012, 48(2):381-387. doi: 10.1016/j.automatica.2011.11.004
|
| [12] |
周波, 樊帅权, 戴先中.基于集员滤波的移动机器人动态环境建模[J].东南大学学报(自然科学版), 2011, 41(1):107-112. doi: 10.3969/j.issn.1001-0505.2011.01.021
ZHOU B, FAN S Q, DAI X Z.Dynamic environment modeling of mobile robots based on set membership filter[J].Journal of Southeast University(Natural Science Edition), 2011, 41(1):107-112(in Chinese). doi: 10.3969/j.issn.1001-0505.2011.01.021
|
| [13] |
LIU Y, ZHAO Y, WU F.Ellipsoidal state-bounding-based set-membership estimation for linear system with unknown-but-bounded disturbances[J].IET Control Theory and Applications, 2016, 10(4):431-442. doi: 10.1049/iet-cta.2015.0654
|
| [14] |
周波, 钱堃, 马旭东, 等.一种新的基于保证定界椭球算法的非线性集员滤波器[J].自动化学报, 2013, 39(2):150-158. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201300112539
ZHOU B, QIAN K, MA X D, et al.A new nonlinear set membership filter based on guaranteed bounding ellipsoid algorithm[J].Acta Automatica Sinica, 2013, 39(2):150-158(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201300112539
|
| [15] |
刘玉双, 赵剡, 吴发林.基于外定界椭球集员估计的纯方位目标跟踪[J].北京航空航天大学学报, 2017, 43(3):497-505. http://bhxb.buaa.edu.cn/CN/abstract/abstract14117.shtml
LIU Y S, ZHAO Y, WU F L.Bearing-only target tracking based on ellipsoidal outer-bounding set-membership estimation[J].Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(3):497-505(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract14117.shtml
|
| [16] |
ELDAR C Y, BECK A, TEBOULLE M.A minimax Chebyshev estimator for bounded error estimation[J].IEEE Transactions on Signal Processing, 2008, 56(4):1388-1397. doi: 10.1109/TSP.2007.908945
|
Figures(4) / Tables(3)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: