| Citation: | FAN Weisi, YIN Jihao, YUAN Ding, et al. A real-time visual odometry method based on crosscheck of feature[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(11): 2444-2453. doi: 10.13700/j.bh.1001-5965.2018.0133(in Chinese)

|
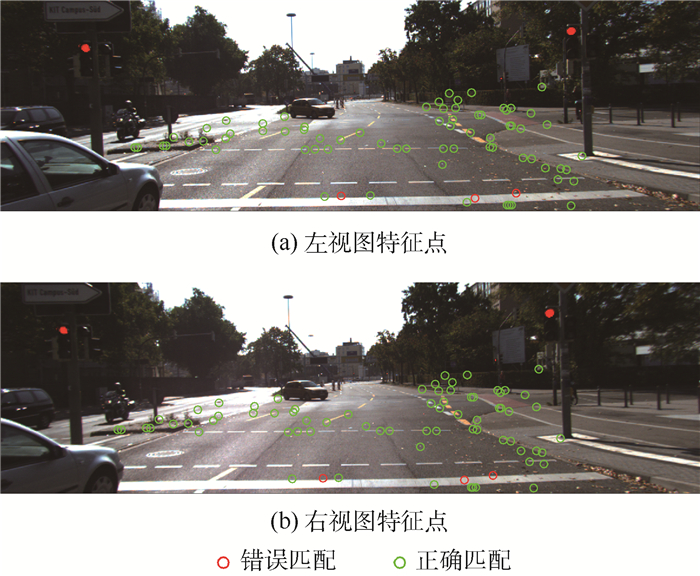
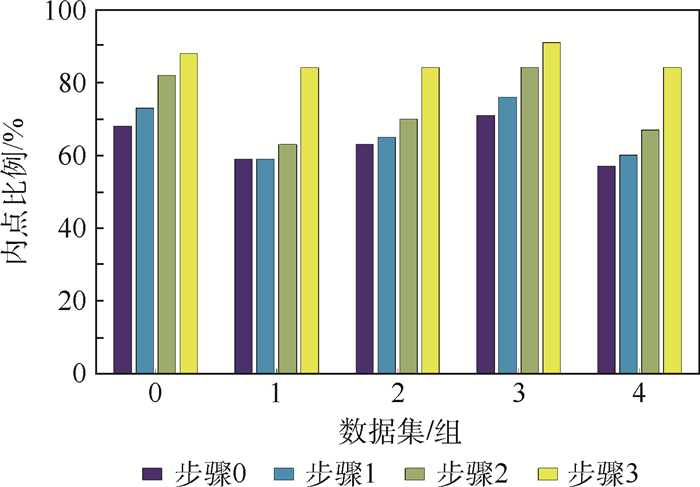
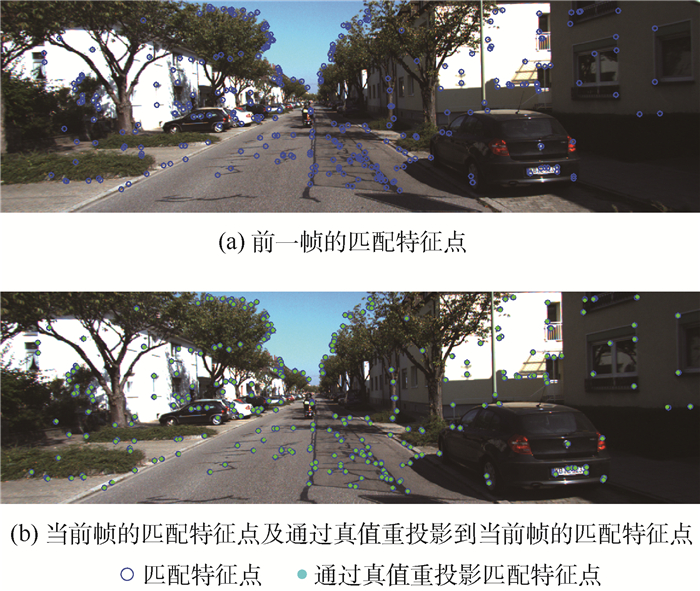
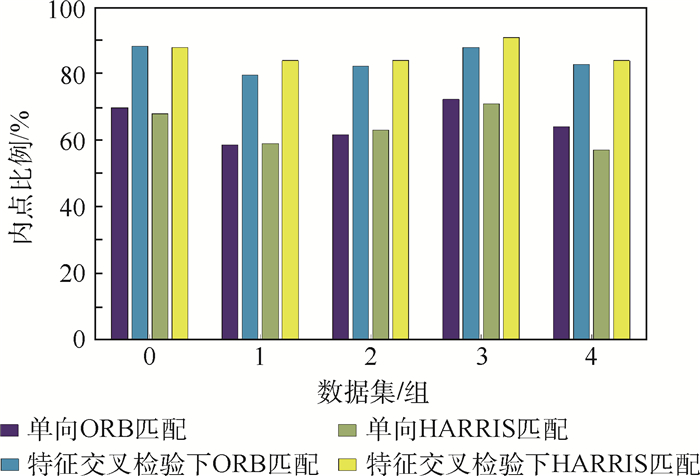
Odometry is widely applied for continuously obtaining system poses in automatic drive system and robot navigation system. Visual odometry can achieve high precision of target motion trajectory estimation with low cost, while feature-based visual odometry has the advantages of low time complexity and high processing speed which are conducive to real-time processing. However, traditional feature-based visual odometry has two technical bottlenecks:low accuracy of feature detection and matching, and the low effectiveness of objective function weight in pose estimation. To address the low accuracy for the feature matching between frames, we present the crosscheck feature matching strategy. It adds the reverse check on the foundation of traditional single-track 'circle' matching strategy to obtain more accurate matching feature sets. This strategy increases inlier ratio and solves the low robustness problem in a single-track 'circle' strategy, which improves estimation accuracy. Meanwhile, we use motion information of previous frame to reduce the searching scope of current frame in crosscheck strategy. To address the low effectiveness of objective function weight, we use the occurrence number of features as its life cycle and present a objective function weight setting method that adaptively considers the life cycle of extracted features. In pose estimation, the life cycle of feature can reflect the stability of features and the objective function weight based on it can decrease the accumulative error. We evaluate the proposed method on publicly available KITTI dataset. The experimental results demonstrate that the proposed method can achieve high-accuracy real-time visual odometry calculation.

| [1] |
NISTER D, NARODITSKY O, BERGEN J.Visual odometry[C]//Proceedings of the 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition.Piscataway, NJ: IEEE Press, 2004: 652-659.
|
| [2] |
FORSTER C, PIZZOLI M, SCARAMUZZA D.SVO: Fast semi-direct monocular visual odometry[C]//IEEE International Conference on Robotics and Automation.Piscataway, NJ: IEEE Press, 2014: 15-22.
|
| [3] |
DAVISON A J.Real-time simultaneous localisation and mapping with a single camera[C]//Proceedings 9th IEEE International Conference on Computer Vision.Piscataway, NJ: IEEE Press, 2008: 1403.
|
| [4] |
KITT B, GEIGER A, LATEGAHN H.Visual odometry based on stereo image sequences with RANSAC-based outlier rejection scheme[C]//Intelligent Vehicles Symposium.Piscataway, NJ: IEEE Press, 2010: 486-492. https://ieeexplore.ieee.org/abstract/document/5548123
|
| [5] |
GEIGER A, ZIEGLER J, STILLER C.StereoScan: Dense 3d reconstruction in real-time[C]//Intelligent Vehicles Symposium(Ⅳ).Piscataway, NJ: IEEE Press, 2011: 963-968. https://ieeexplore.ieee.org/document/5940405
|
| [6] |
CVIŠIĆI, PETROVIĆ I.Stereo odometry based on careful feature selection and tracking[C]//2015 European Conference on Mobile Robots (ECMR).Piscataway, NJ: IEEE Press, 2015: 1-6. https://ieeexplore.ieee.org/abstract/document/7324219
|
| [7] |
BADINO H, YAMAMOTO A, KANADE T.Visual odometry by multi-frame feature integration[C]//2013 IEEE International Conference on Computer Vision Workshops.Piscataway, NJ: IEEE Press, 2013: 222-229. https://www.ri.cmu.edu/pub_files/2013/12/badino_cvad13.pdf
|
| [8] |
GEIGER A, LENZ P, URTASUN R.Are we ready for autonomous driving The KITTI vision benchmark suite[C]//2012 IEEE Conference on Computer Vision and Pattern Recognition.Piscataway, NJ: IEEE Press, 2012: 3354-3361.
|
| [9] |
PERIS M, MAKI A, MARTULL S, et al.Towards a simulation driven stereo vision system[C]//International Conference on Pattern Recognition.Piscataway, NJ: IEEE Press, 2012: 1038-1042. https://ieeexplore.ieee.org/document/6460313
|
| [10] |
SCARAMUZZA D, FRAUNDORFER F.Visual odometry[Tutorial] [J].IEEE Robotics & Automation Magazine, 2011, 18(4):80-92. http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ0224794183/
|
| [11] |
FRAUNDORFER F, SCARAMUZZA D.Visual odometry:Part Ⅱ:Matching, robustness, optimization, and applications[J].IEEE Robotics & Automation Magazine, 2012, 19(2):78-90. http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ0231449634/
|
| [12] |
ENGEL J, STURM J, CREMERS D.Semi-dense visual odometry for a monocular camera[C]//IEEE International Conference on Computer Vision.Piscataway, NJ: IEEE Press, 2014: 1449-1456.
|
| [13] |
BEALL C, LAWRENCE B J, ILA V, et al.3D reconstruction of underwater structures[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems.Piscataway, NJ: IEEE Press, 2010: 4418-4423. https://www.cc.gatech.edu/~dellaert/pub/Beall10iros.pdf
|
| [14] |
HOWARD A.Real-time stereo visual odometry for autonomous ground vehicles[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems.Piscataway, NJ: IEEE Press, 2008: 3946-3952. https://ieeexplore.ieee.org/abstract/document/4651147
|
| [15] |
MUR-ARTAL R, MONTIEL J M M, TARDÓS J D.ORB-SLAM:A versatile and accurate monocular SLAM system[J].IEEE Transactions on Robotics, 2015, 31(5):1147-1163. doi: 10.1109/TRO.2015.2463671
|
| [16] |
KAESS M, NI K, DELLAERT F.Flow separation for fast and robust stereo odometry[C]//IEEE International Conference on Robotics and Automation.Piscataway, NJ: IEEE Press, 2009: 973-978. http://people.csail.mit.edu/kaess/pub/Kaess09icra.pdf
|
| [17] |
DEIGMOELLER J, EGGERT J.Stereo visual odometry without temporal filtering[C]//Pattern recognition.Berlin: Springer, 2016: 166-175. doi: 10.1007%2F978-3-319-45886-1_14
|
| [18] |
BUCZKO M, WILLERT V.Flow-decoupled normalized reprojection error for visual odometry[C]//IEEE International Conference on Intelligent Transportation Systems.Piscataway, NJ: IEEE Press, 2016: 1161-1167. https://www.researchgate.net/publication/309731985_Flow-Decoupled_Normalized_Reprojection_Error_for_Visual_Odometry
|
| [19] |
KLEIN G, MURRAY D.Parallel tracking and mapping for small AR workspaces[C]//IEEE and ACM International Symposium on Mixed and Augmented Reality.Piscataway, NJ: IEEE Press, 2008: 1-10. https://ieeexplore.ieee.org/document/4538852
|
| [20] |
TRIGGS B, MCLAUCHLAN P F, HARTLEY R I, et al.Bundle adjustment-A modern synthesis[C]//International Workshop on Vision Algorithms.Berlin: Springer, 1999: 298-372. https://lear.inrialpes.fr/pubs/2000/TMHF00/Triggs-va99.pdf
|

Figures(7) / Tables(4)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: