| Citation: | WANG Changqing, FU Lichun, ZABOLOTNOV Yuriy, et al. Matrix decomposition based control for space tether system with incomplete state feedback[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(5): 902-911. doi: 10.13700/j.bh.1001-5965.2018.0533(in Chinese)

|
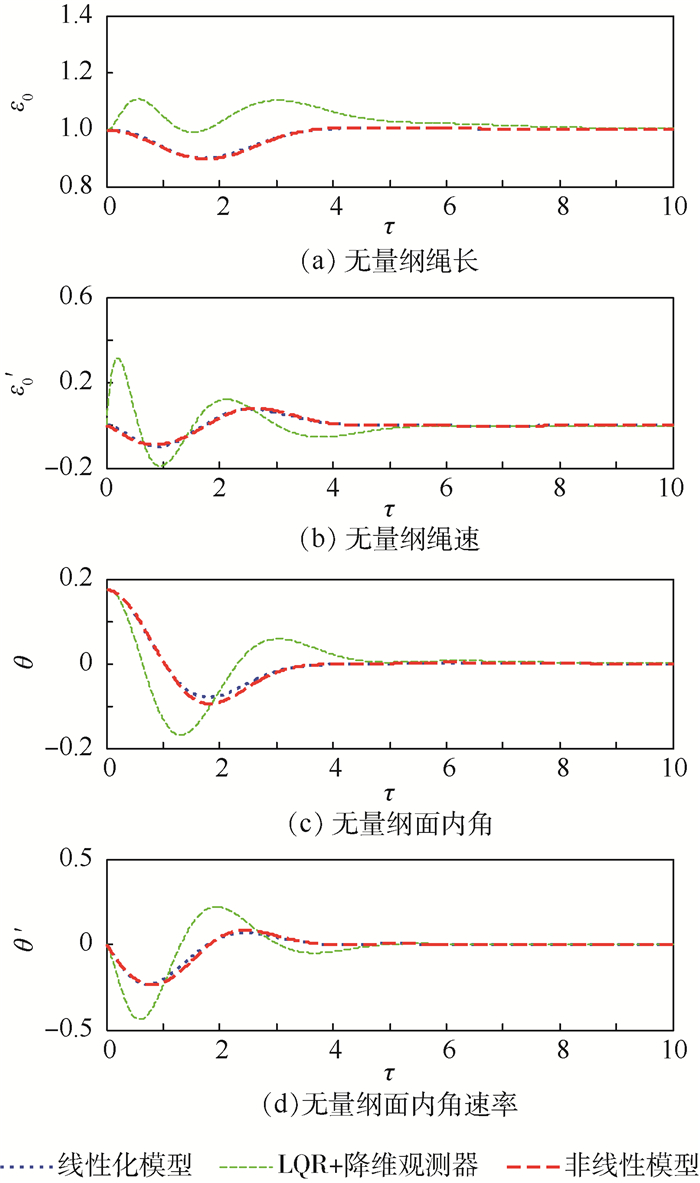
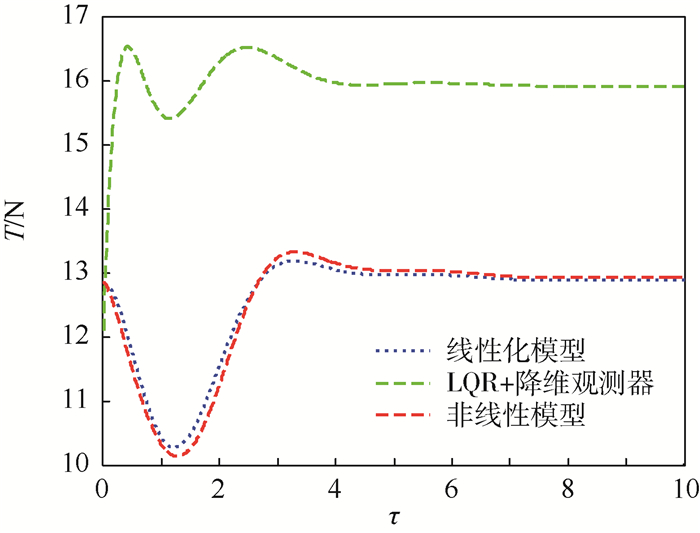
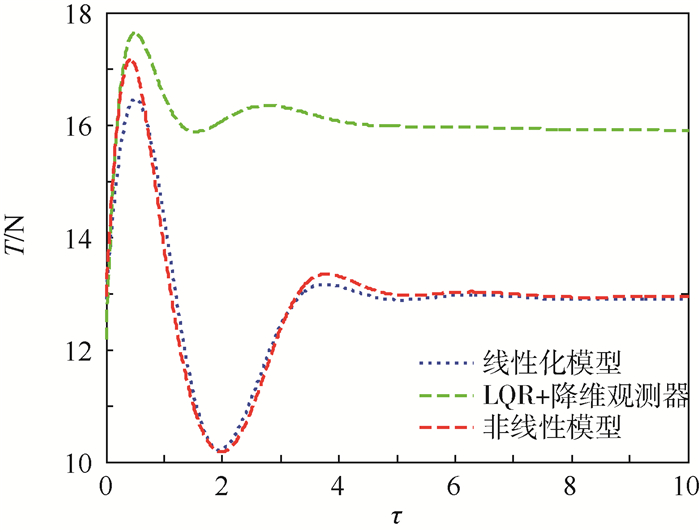
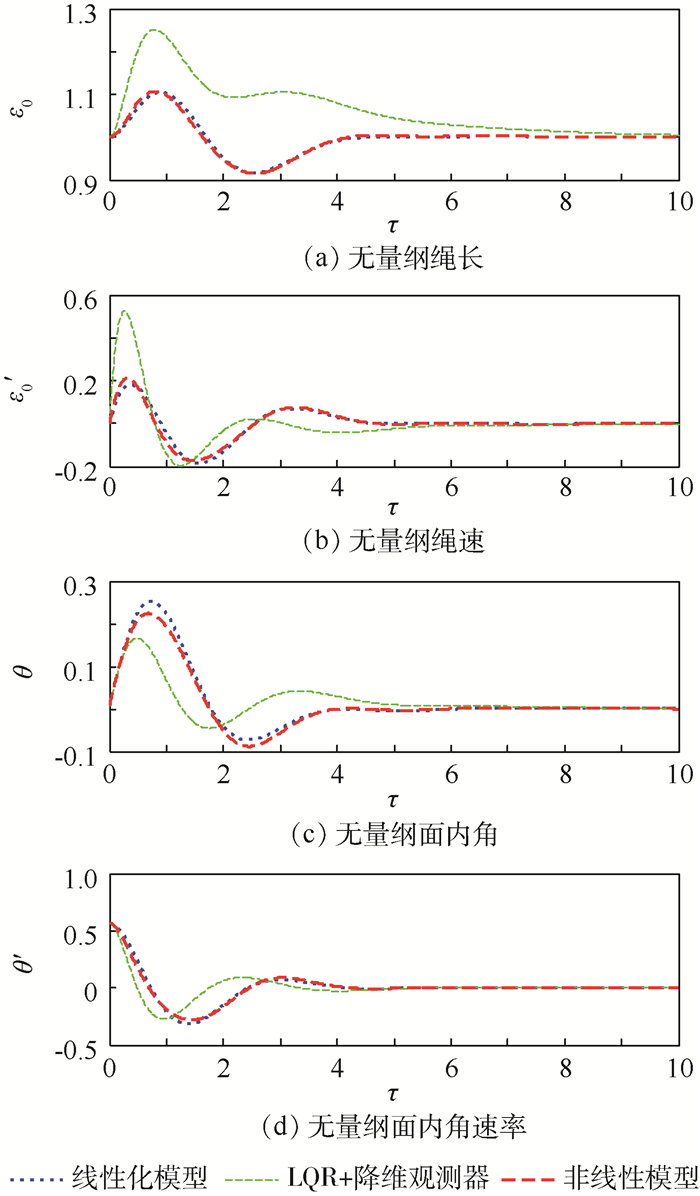
A solution to the stage of state-keeping after tether deployment or stage of tether in-plane motion stabilization after payload capture with space tether system (STS) in the case of incomplete state feedback is proposed, which is based on matrix decomposition. Feedbacks of in-plane angle and its angular velocity are assumed to be absent. Tension controller is designed to surpass tether non-normal behavior after deployment and in-plane swing in-plane after payload to make the system return to stable state. Conventional combination method of linear quadratic regulator (LQR) + reduced dimension observer is also introduced for comparison with the proposed controller. Effectiveness of the proposed controller is validated with perturbed parameters. The simulation results indicate that the proposed control law demonstrates better performance in overshoot and settling time than LQR + reduced dimension observer method. Deployment error of tether and in-plane perturbation are effectively controlled by the proposed control law. The proposed control law has the advantages of structural simplicity, good control effectiveness, and no parameter adjustment in design process.

| [1] |
PASCA M.Nonlinear control of tethered satellite system oscillations[J].Nonlinear Analysis, 1997, 30(6):3867-3878. doi: 10.1016/S0362-546X(97)00114-4
|
| [2] |
WILLIAMS P, WATANABE T, BLANKSBY C, et al.Libration control of flexible tethers using electromagnetic forces and movable attachment[J].Journal of Guidance, Control, and Dynamics, 2004, 27(5):882-897. doi: 10.2514/1.1895
|
| [3] |
MANKALA K K, AGRAWAL S K.A boundary controller based on linear infinite dimensional system for station keeping of a tethered satellite system[C]//American Control Conference.Piscataway, NJ: IEEE Press, 2006: 9036818.
|
| [4] |
LARSEN M B, BLANKE M.Control by damping injection of electrodynamic tether system in an inclined orbit[C]//American Control Conference.Piscataway, NJ: IEEE Press, 2009: 4824-4829.
|
| [5] |
YU B S, JIN D, WEN H.Nonlinear dynamics of flexible tethered satellite system subject to space environment[J].Applied Mathematics and Mechanics(English Edition), 2016, 37(4):485-500. doi: 10.1007/s10483-016-2049-9
|
| [6] |
余本嵩.复杂太空环境下柔性绳系卫星动力学与控制[D].南京: 南京航空航天大学, 2011: 91-94. http://cdmd.cnki.com.cn/Article/CDMD-10287-1012033381.htm
YU B S.Dynamics and control of flexible tethered satellite in complex space environment[D].Nanjing: Nanjing University of Aeronautics and Astronautics, 2011: 91-94(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10287-1012033381.htm
|
| [7] |
庞兆君.绳系卫星状态保持阶段运动分析与控制[D].南京: 南京航空航天大学, 2015: 39-42. http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=D820835
PANG Z J.Motions and their controls of tethered satellite systems during station-keeping[D].Nanjing: Nanjing University of Aeronautics and Astronautics, 2015: 39-42(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=D820835
|
| [8] |
SUN L, ZHAO G W, HUANG H.Stability and control of tethered satellite with chemical propulsion in orbital plane[J].Nonlinear Dynamics, 2013, 74(4):1113-1131. doi: 10.1007/s11071-013-1028-z
|
| [9] |
孙亮, 赵国伟, 黄海, 等.面内轨道转移过程中的绳系系统摆振特性研究[J].航空学报, 2012, 33(7):1245-1254. http://d.old.wanfangdata.com.cn/Periodical/hkxb201207010
SUN L, ZHAO G W, HUANG H, el al.Analysis of librational and vibrational characteristics for tethered systems during orbital transfer in plan[J].Acta Aeronautica et Astronautica Sinica, 2012, 33(7):1245-1254(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/hkxb201207010
|
| [10] |
张帆, 黄攀峰.空间绳系机器人抓捕非合作目标的质量特性参数辨识[J].宇航学报, 2015, 36(6):630-639. doi: 10.3873/j.issn.1000-1328.2015.06.003
ZHANG F, HUANG P F.Inertia parameter estimation for an noncooperative target captured by a space tethered system[J].Journal of Astronautics, 2015, 36(6):630-639(in Chinese). doi: 10.3873/j.issn.1000-1328.2015.06.003
|
| [11] |
赵国伟, 张兴民, 唐斌, 等.空间绳系拖拽系统摆动特性与平稳控制[J].北京航空航天大学学报, 2016, 42(4):694-702. http://bhxb.buaa.edu.cn/CN/abstract/abstract13863.shtml
ZHAO G W, ZHANG X M, TANG B, et al.Properties of pendulum motion of tether tugging system and its stable control[J].Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(4):694-702(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract13863.shtml
|
| [12] |
张宇靖, 钟睿.基于非线性模型预测的绳系系统系绳摆振控制[J].北京航空航天大学学报, 2018, 44(10):2200-2207. http://bhxb.buaa.edu.cn/CN/abstract/abstract14620.shtml
ZHANG Y J, ZHONG R.Tether swing control of tether system based on nonlinear model prediction[J].Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(10):2200-2207(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract14620.shtml
|
| [13] |
LORENZINI E C.Error-tolerant technique for catching a spacecraft with a spinning tether[J].Journal of Vibration and Control, 2004, 10(10):1473-1491. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=5d4d2c489eb43c12dc6646dcddde70cd
|
| [14] |
王班, 易琳, 郭吉丰, 等.一种基于摆长反复小幅改变的面内摆动抑制方法[J].四川大学学报(工程科学版), 2014, 46(6):191-197. http://d.old.wanfangdata.com.cn/Periodical/scdxxb-gckx201406030
WANG B, YI L, GUO J F, et al.An in-plane swing damping method based on pendulum length changed repeatedly[J].Journal of Sichuan University(Engineering Science Edition), 2014, 46(6):191-197(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/scdxxb-gckx201406030
|
| [15] |
李超, 王长青, 李爱军, 等.基于标准系数法的空间系绳系统状态保持稳定控制[J].航天控制, 2014, 32(2):73-77. doi: 10.3969/j.issn.1006-3242.2014.02.013
LI C, WANG C Q, LI A J, et al.Stability control for station-keeping phase of space tether system based on standard coefficient method[J].Aerospace Control, 2014, 32(2):73-77(in Chinese). doi: 10.3969/j.issn.1006-3242.2014.02.013
|
| [16] |
BANGHAM M E, LORENZINI E C, VESTAL L.Tether transportation system study: NASA/TP-1998-206959[R].Washington, D.C.: NASA, 1998.
|
| [17] |
CHEN Y, HUANG R, REN X, et al.History of the tether concept and tether missions:A review[J].ISRN Astronomy and Astrophysics, 2013, 2013:502973. http://d.old.wanfangdata.com.cn/OAPaper/oai_doaj-articles_9e3c02876bf0de0ee6eaca159ab884ac
|
| [18] |
ASHIDA H, FUJIHASHI K, INAGAWA S, et al.Design of Tokyo tech nano-satellite CUTE-1.7+APD Ⅱ and its operation[J].Acta Astronautica, 2010, 66(9):1412-1424. http://www.sciencedirect.com/science/article/pii/S0094576509005360
|
| [19] |
WEN H, ZHU Z H, JIN D, et al.Space tether deployment control with explicit tension constraint and saturation function[J].Journal of Guidance, Control, and Dynamics, 2016, 39(4):916-921. doi: 10.2514/1.G001356
|
| [20] |
WILLIAMS P, BLANKSBY C, TRIVAILO P, et al.In-plane payload capture using tethers[J].Acta Astronautica, 2005, 57(10):772-787. doi: 10.1016/j.actaastro.2005.03.069
|
| [21] |
KRUIJFF M, VAN DER HEIDE E, OCKELS W, et al.First mission results of the YES2 tethered SpaceMail experiment[C]//AIAA/AAS Astrodynamics Specialist Conference and Exhibit.Reston: AIAA, 2008: 7385.
|

Figures(7)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: