| Citation: | YE Wen, CAI Chenguang, YANG Ping, et al. UKF estimation method incorporating Gaussian process regression[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(6): 1081-1087. doi: 10.13700/j.bh.1001-5965.2018.0591(in Chinese)

|
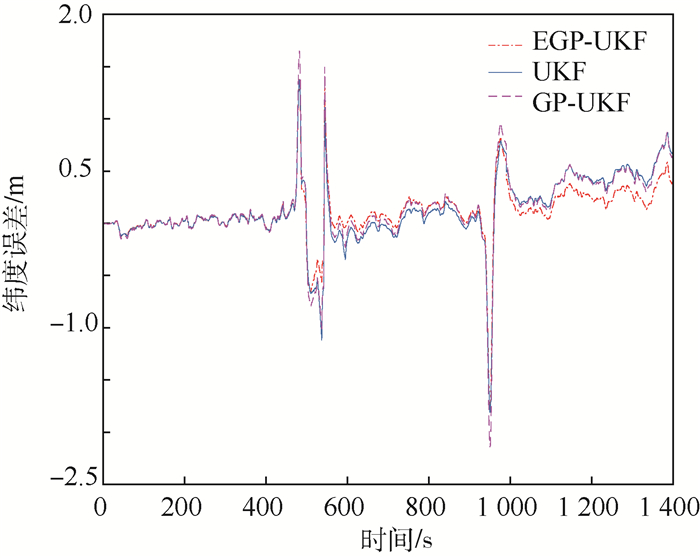
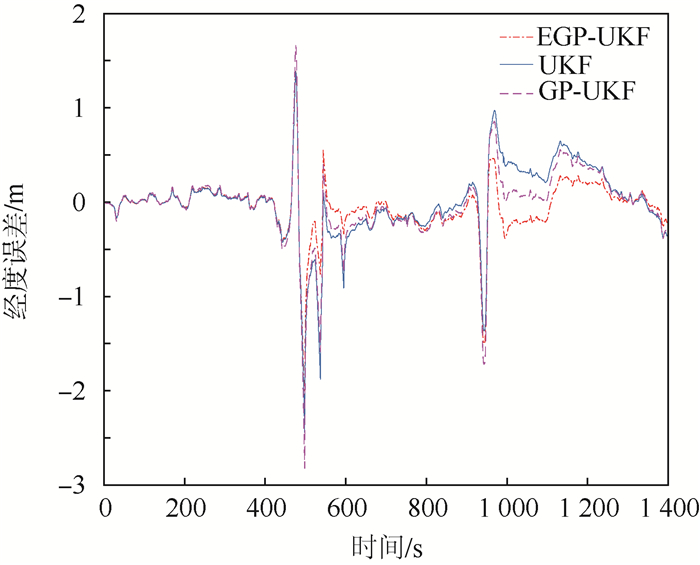
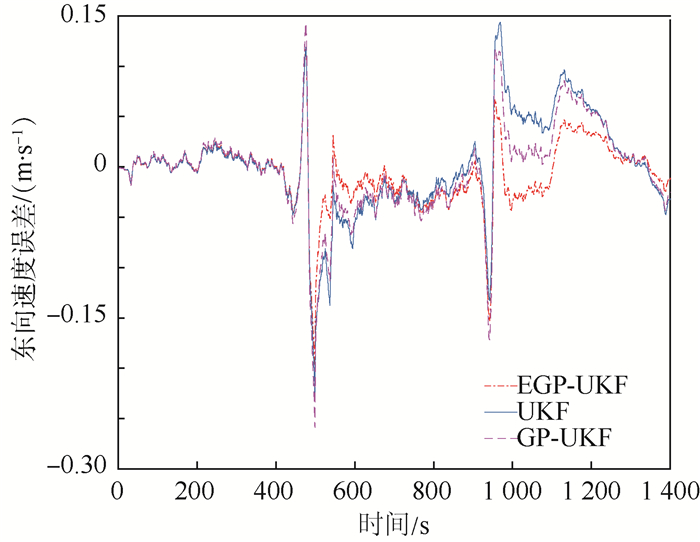
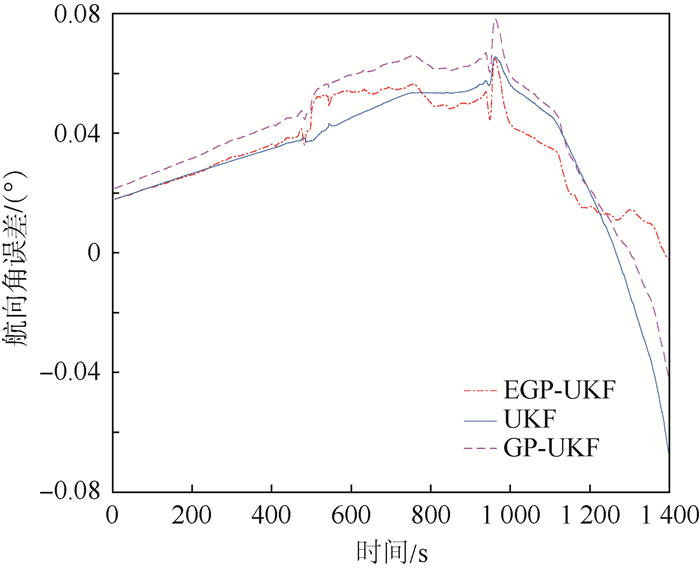
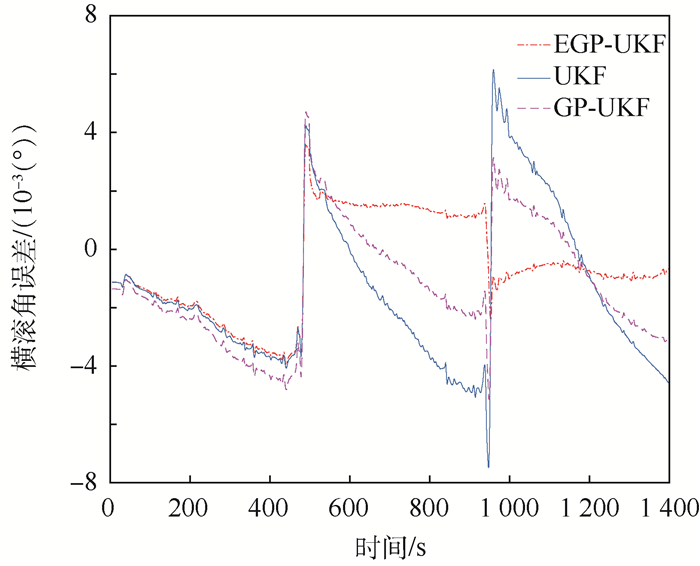
The high-precision filter estimation is a key technology in the SINS/GNSS integrated navigation system, and its estimation accuracy has direct influence on the accuracy of navigation. The traditional filter estimation method is based on inertial navigation error model, and does not take its uncertainty into account. Aimed at the problem, a high-precision filter estimation method is presented, which uses Gaussian process regression (GPR) to enhance the capabilities of prediction and estimation for parametric unscented Kalman filter (UKF). On one hand, it can estimate the state vector of the nonlinear parametric UKF on condition that trained data is limited; on the other hand, GPR can also take both the noise and the uncertainty in the nonlinear parametric UKF into consideration. The real vehicle-mounted experiment results show that the proposed method can effectively enhance filter estimation precision through applying the enhanced GPR-UKF into the SINS/GNSS integrated navigation system.

| [1] |
YE W, LI J L, LI L C.Design and development of a real-time multi-DSPs and FPGA-based DPOS for InSAR applications[J]. IEEE Sensors Journal, 2018, 18(8):3419-3425. doi: 10.1109/JSEN.2018.2799622
|
| [2] |
YE W, LIU Z C, LI C, et al. Enhanced Kalman filter using noisy input Gaussian process regression for bridging GPS outages in a POS[J]. The Journal of Navigation, 2018, 71(3):565-584. doi: 10.1017/S0373463317000819
|
| [3] |
RUDOLPH V D. Sigma-point Kalman filters for probabilistic inference in dynamic state-space models[D]. Oregon: Oregon Health and Science University, 2004.
|
| [4] |
CHANG L B, HU B Q, LI A, et al.Transformed unscented Kalman filter[J]. IEEE Transactions on Automatic Control, 2013, 58(1):252-257. doi: 10.1109/TAC.2012.2204830
|
| [5] |
GONG X L, ZHANG J X, FANG J C.A modified nonlinear two-filter smoothing for high-precision airborne integrated GPS and inertial navigation[J]. IEEE Transactions on Instrumentation and Measurement, 2015, 64(12):3315-3322. doi: 10.1109/TIM.2015.2454672
|
| [6] |
GREWAL M S, ANDREWS A P.Kalman filtering: Theory and practice using MATLAB[M]. 3rd ed. Hoboken: Wiley, 2008.
|
| [7] |
RASMUSSEN C E, WILLIAMS C K I.Gaussian processes for machine learning(adaptive computation and machine learning)[M]. Cambrige:MIT Press, 2005.
|
| [8] |
XU Z, LI Y, RIZOS C, et al.Novel hybrid of LS-SVM and Kalman filter for GNSS/INS integration[J]. The Journal of Navigation, 2010, 63(2):289-299. doi: 10.1017/S0373463309990361
|
| [9] |
ROBERTS S, AIGRAIN S.Gaussian processes for time-series modelling[J]. Philosophical Transactions, 2012, 371(1984):1-25. http://d.old.wanfangdata.com.cn/OAPaper/oai_arXiv.org_1201.0155
|
| [10] |
ATIA M M, NOURELDIN A, KORENBERG M. Gaussian process regression approach for bridging GPS outages in integrated navigation systems[J]. Electronics Letters, 2011, 47(1):52-53. doi: 10.1049/el.2010.7164
|
| [11] |
CHEN H M, CHENG X H, WANG H, et al. Dealing with observation outages within navigation data using Gaussian process regression[J]. The Journal of Navigation, 2014, 67(4):603-615. doi: 10.1017/S0373463314000010
|
| [12] |
何志昆, 刘光斌, 赵曦晶, 等.高斯过程回归方法综述[J].控制与决策, 2013, 28(8):1121-1129. http://d.old.wanfangdata.com.cn/Periodical/kzyjc201308001
HE Z K, LIU G B, ZHAO X J, et al.Review of Gauss process regression methods[J]. Control and Decision, 2013, 28(8):1121-1129(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/kzyjc201308001
|
| [13] |
DEISEBROTH M P, FOX D, RASUSSEN C E. Gaussian processes for data-efficient learning in robotics and control[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(2):408-423. doi: 10.1109/TPAMI.2013.218
|
| [14] |
KO J, FOX D. Learning GP-Bayes filters via Gaussian process latent variable models[J]. Autonomous Robots, 2011, 30(1):3-23. doi: 10.1007/s10514-010-9213-0
|
| [15] |
李鹏, 宋申民, 陈兴林, 等.联合高斯回归的平方根UKF方法[J].系统工程与电子技术, 2010, 32(6):1281-1285. doi: 10.3969/j.issn.1001-506X.2010.06.036
LI P, SONG S M, CHEN X L, et al.Combining Gaussian process regression and square root UKF method[J]. Journal of Systems Engineering and Electronics, 2010, 32(6):1281-1285(in Chinese). doi: 10.3969/j.issn.1001-506X.2010.06.036
|

Figures(10)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: