| Citation: | WANG Pangwei, DENG Hui, YU Hongbin, et al. Real-time regional path decision method in cooperative vehicle infrastructure system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(7): 1349-1360. doi: 10.13700/j.bh.1001-5965.2018.0613(in Chinese)

|
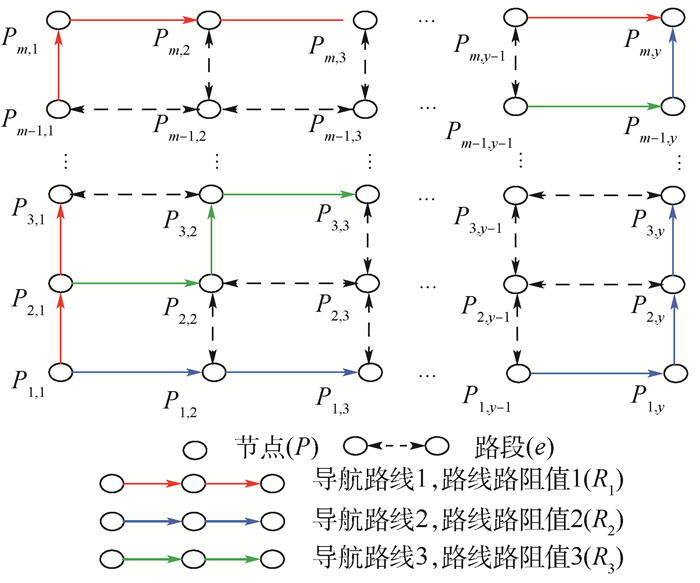
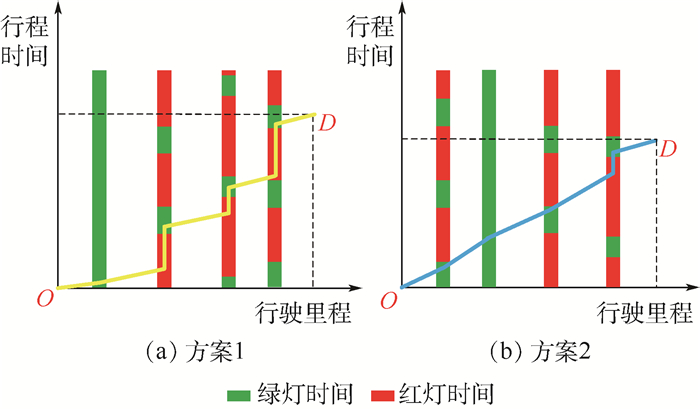
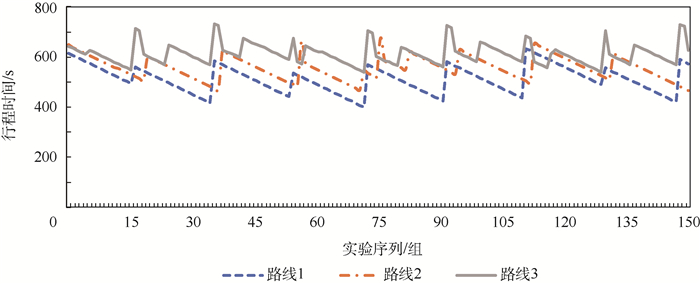
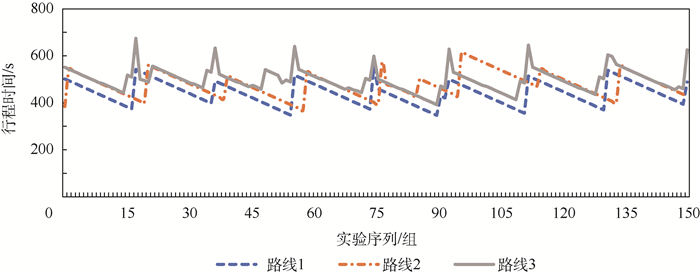
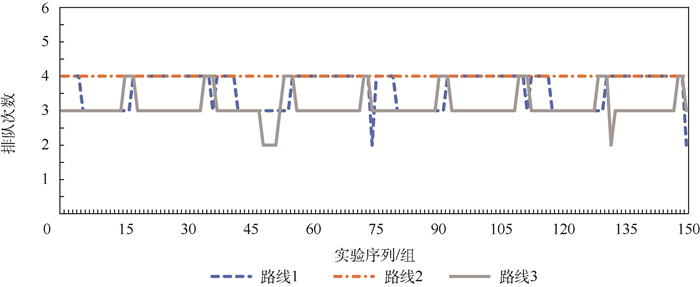
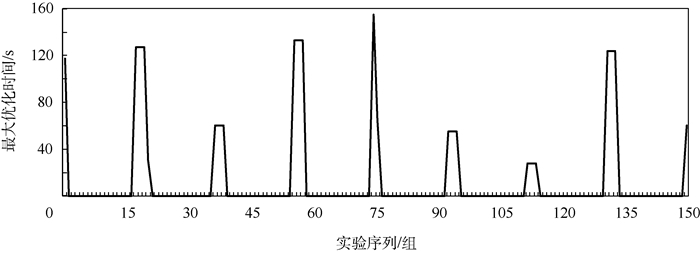
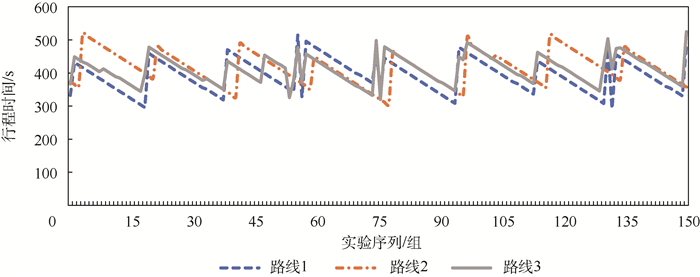
To solve the instability of the path planning system caused by vehicle driving data loss and lag, a novel real-time regional path decision method based on the cooperative vehicle infrastructure system (CVIS) was presented in this paper. Firstly, the current road section resistance value was calculated dynamically through acquiring the real-time driving data of connected vehicles, combing with the traffic signal timing and path steering information, and considering the non-free flow situation which vehicles may encounter when passing through the intersection. Secondly, the travel time of each alternative route was predicted in real time according to the current road resistance statistics and the road network topology structure. After that, the predicted route with the least travel time was selected as the optimal vehicle driving path. Finally, the typical regional road network data of Wangjing area in Beijing was selected as the test scenario. 150 sets of tested results show that the average travel time in different periods of the optimized route obtained by this method is 9.52 seconds, 13.39 seconds and 20.65 seconds shorter than recommended route of the navigation system respectively, which proves the feasibility of the proposed method.
| [1] |
葛艳, 王健, 孟友新, 等.车辆导航动态路径规划的研究进展[J].公路交通科技, 2010, 27(11):113-117. doi: 10.3969/j.issn.1002-0268.2010.11.021
GE Y, WANG J, MENG Y X, et al.Research progress on dynamic route planning of vehicle navigation[J].Journal of Highway and Transportation Research and Development, 2010, 27(11):113-117(in Chinese). doi: 10.3969/j.issn.1002-0268.2010.11.021
|
| [2] |
孙海鹏, 翟传润, 战兴群, 等.基于实时交通信息的动态路径规划技术[J].微计算机信息, 2007, 23(24):177-178. doi: 10.3969/j.issn.1008-0570.2007.24.068
SUN H P, ZHAI C R, ZHAN X Q, et al.Dynamic route planning techniques based on real time traffic information[J].Microcomputer Information, 2007, 23(24):177-178(in Chinese). doi: 10.3969/j.issn.1008-0570.2007.24.068
|
| [3] |
向冬梅, 陈树辉.基于动态交通的最短时间路径规划方法研究[J].微计算机信息, 2012, 28(9):317-319. http://www.cnki.com.cn/Article/CJFDTOTAL-WJSJ201209129.htm
XIANG D M, CHEN S H.Research on the shortest time path planning based on dynamic traffic[J].Microcomputer Information, 2012, 28(9):317-319(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-WJSJ201209129.htm
|
| [4] |
李露蓉, 王蕾, 高应波, 等.基于优化蚁群算法的动态路径规划问题研究[J].广西大学学报(自然科学版), 2013, 38(2):359-367. doi: 10.3969/j.issn.1001-7445.2013.02.018
LI L R, WANG L, GAO Y B, et al.A dynamic path planning model based on the optimal ant colony algorithm[J].Journal of Guangxi University(Natural Science Edition), 2013, 38(2):359-367(in Chinese). doi: 10.3969/j.issn.1001-7445.2013.02.018
|
| [5] |
刘微, 朱征宇, 刘琳, 等.基于行程时间多步预测的实时路径导航算法[J].计算机应用研究, 2013, 30(2):346-349. doi: 10.3969/j.issn.1001-3695.2013.02.006
LIU W, ZHU Z Y, LIU L, et al.Realtime navigation algorithm based on multistep travel time prediction[J].Application Research of Computers, 2013, 30(2):346-349(in Chinese). doi: 10.3969/j.issn.1001-3695.2013.02.006
|
| [6] |
周明秀, 程科, 汪正霞.动态路径规划中的改进蚁群算法[J].计算机科学, 2013, 40(1):314-316. doi: 10.3969/j.issn.1002-137X.2013.01.073
ZHOU M X, CHENG K, WANG Z X.Improved ant colony algorithm with planning of dynamic path[J].Computer Science, 2013, 40(1):314-316(in Chinese). doi: 10.3969/j.issn.1002-137X.2013.01.073
|
| [7] |
周申培, 朱泽雨, 吴涛.基于Android平台的实时路径规划应用开发[J].信息通信, 2016(5):110-112. doi: 10.3969/j.issn.1673-1131.2016.05.050
ZHOU S P, ZHU Z Y, WU T.Real-time path planning application development based on the Android platform[J].Information & Communications, 2016(5):110-112(in Chinese). doi: 10.3969/j.issn.1673-1131.2016.05.050
|
| [8] |
SEN S, PILLAI R, JOSHI S, et al.A mean-variance model for route guidance in advanced traveler information systems[J].Transportation Science, 2001, 35(1):37-49. doi: 10.1287/trsc.35.1.37.10141
|
| [9] |
WU X, NIE Y.Modeling heterogeneous risk-taking behavior in route choice:A stochastic dominance approach[J].Transportation Research Part A:Policy and Practice, 2011, 45(9):896- 915. doi: 10.1016/j.tra.2011.04.009
|
| [10] |
XING T, ZHOU X.Finding the most reliable path with and without link travel time correlation:A Lagrangian substitution based approach[J].Transportation Research Part B:Methodological, 2011, 45(10):1660-1679. doi: 10.1016/j.trb.2011.06.004
|
| [11] |
CHEN B Y, LAM W H K, SUMALEE A, et al.Finding reliable shortest paths in road networks under uncertainty[J].Networks and Spatial Economics, 2013, 13(2):123-148. doi: 10.1007/s11067-012-9175-1
|
| [12] |
BACKFRIEDER C, OSTERMAYER G, MECKLENBRÄUKER C F.Increased traffic flow through node-based bottleneck prediction and V2X communication[J].IEEE Transactions on Intelligent Transportation Systems, 2017, 18(2):349-363. doi: 10.1109/TITS.2016.2573292
|
| [13] |
LIU J, WAN J, WANG Q, et al.A survey on position-based routing for vehicular ad hoc networks[J].Telecommunication Systems, 2016, 62(1):15-30. doi: 10.1007/s11235-015-9979-7
|
| [14] |
ZHU T, SONG Z, WU D, et al.A novel freeway traffic speed estimation model with massive cellular signaling data[J].International Journal of Web Services Research, 2016, 13(1):69-87. doi: 10.4018/IJWSR
|
| [15] |
QIN Q, FENG M, SUN J, et al.Prediction of road resistance based on historical/real-time information and road quality[C]//International Conference on Fuzzy Systems and Knowledge Discovery.Piscataway, NJ: IEEE Press, 2016: 1073-1077.
|
| [16] |
WANG Z, CHEN Y, CHEN N, et al.The research on control strategy of urban expressway under CVIS[J].International Journal of Simulation:Systems, Science and Technology, 2016, 16(1):30-34.
|
| [17] |
王庞伟, 余贵珍, 王云鹏, 等.基于滑模控制的车车协同主动避撞算法[J].北京航空航天大学学报, 2014, 40(2):268-273. https://bhxb.buaa.edu.cn/CN/abstract/abstract12860.shtml
WANG P W, YU G Z, WANG Y P, et al.Cooperative active collision avoidance algorithm based on sliding mode control[J].Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(2):268-273(in Chinese). https://bhxb.buaa.edu.cn/CN/abstract/abstract12860.shtml
|
| [18] |
章权, 温惠英, 孙博.适于配送车辆导航路径规划的遍历模型的改进型粒子群优化算法[D].华南理工大学学报, 2011, 39(8): 110-117.
ZHANG Q, WEN H Y, SUN B.Improved particle swarm optimization algorithm of ergodic model for routing planning of delivery vehicle navigation[D].Journal of South China University of Technology, 2011, 39(8): 110-117(in Chinese).
|
| [19] |
JANCHIV A, BATSAIKHAN D, KIM B S, et al.Time-efficient and complete coverage path planning based on flow networks for multi-robots[J].International Journal of Control, Automation, and Systems, 2013, 11(2):369-376. doi: 10.1007/s12555-011-0184-5
|
| [20] |
ADLER J L, SATAPATHY G, MANIKONDA V, et al.A multi-agent approach to cooperative traffic management and route guidance[J].Transportation Research Part B:Methodological, 2005, 39(4):297-318. doi: 10.1016/j.trb.2004.03.005
|
| [21] |
PAZ A, PEETA S.On-line calibration of behavior parameters for behavior-consistent route guidance[J].Transportation Research Part B:Methodological, 2009, 43(4):403-421. doi: 10.1016/j.trb.2008.07.007
|


Figures(18) / Tables(7)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

Wu Hong, Li Yulong, Chen Jianget al. Design of evaporator-condenser-separate mechanical vapor compression system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(3): 376-380. (in Chinese)





 DownLoad:
DownLoad: