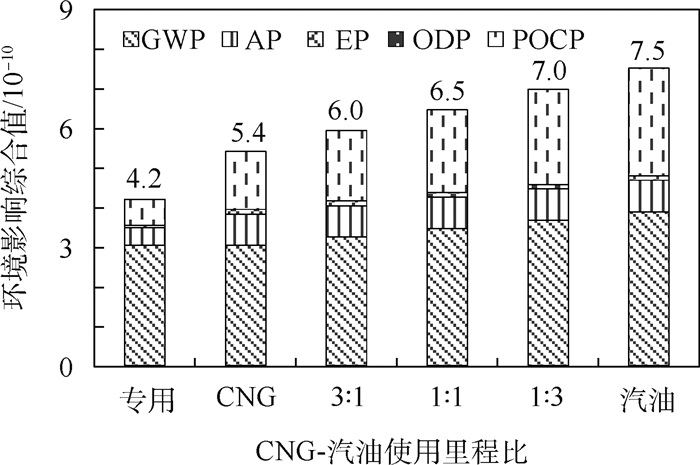
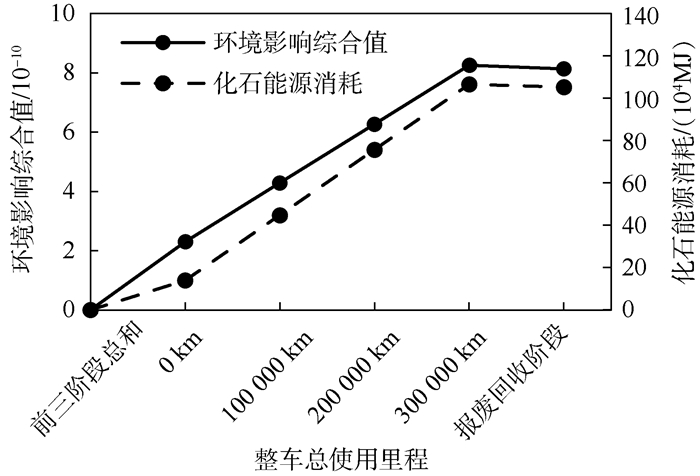
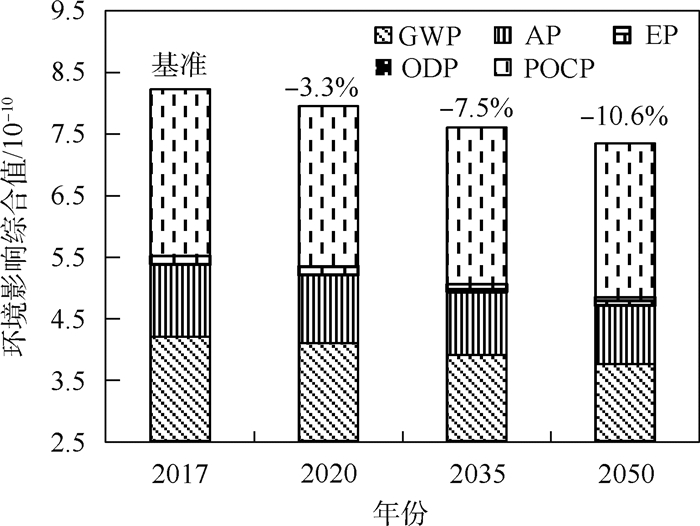
A full life cycle evaluation model of compressed natural gas (CNG)/gasoline bi-fuel passenger vehicle has been established based on GaBi software, which is adopted to analyze the energy consumption and emission of the bi-fuel vehicle from the raw material acquirement phase to the scrap recycling phase, and the sensitivity of the energy consumption and emission in full life cycle towards the using mileage ratio of the CNG-gasoline, total mileage and electric power structure. The results indicate that, in the full life cycle, the energy consumption and pollutant emission in the using stage are the most, taking up more than 50% of the full life cycle; major pollutants are CO, NOx, SO2, etc.; the CNG/gasoline bi-fuel vehicle can effectively cut the environmental influence down with a lower cost, but a CNG special vehicle is more beneficial to the energy saving and emission reduction; the energy consumption and emission of the full life cycle can obviously decrease by recycling the scrapped vehicles, increasing the CNG using mileage ratio of bi-fuel vehicles, and improving the ratio of using renewable energy to generate power.



 Download (18485)
Download (18485) 
 Views
Views  Cited by
Cited by 






























 XML Online Production Platform
XML Online Production Platform
