| Citation: | WANG Zekun, WU Minggong, WEN Xiangxi, et al. Flight collision resolution and recovery strategy based on velocity obstacle method[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(7): 1294-1302. doi: 10.13700/j.bh.1001-5965.2018.0650(in Chinese)

|
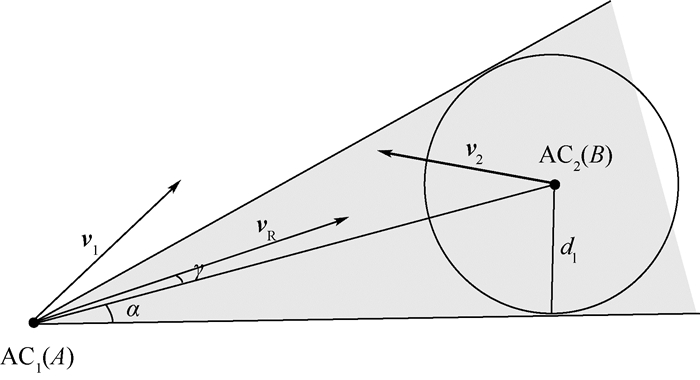
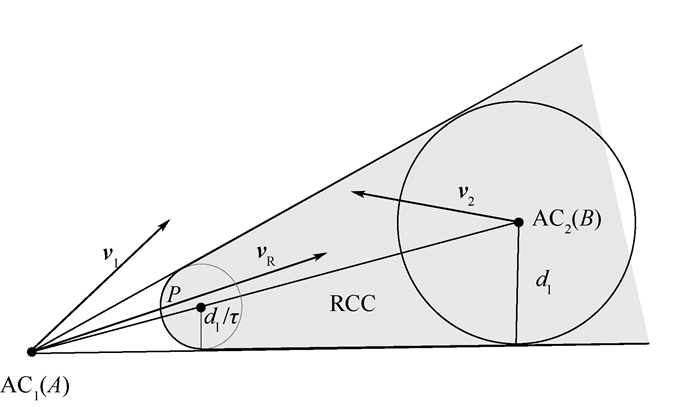
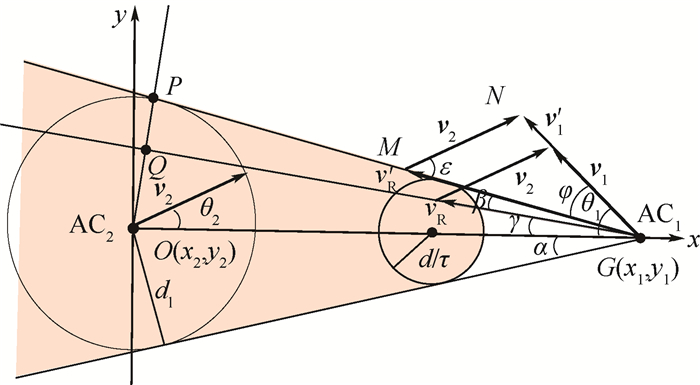
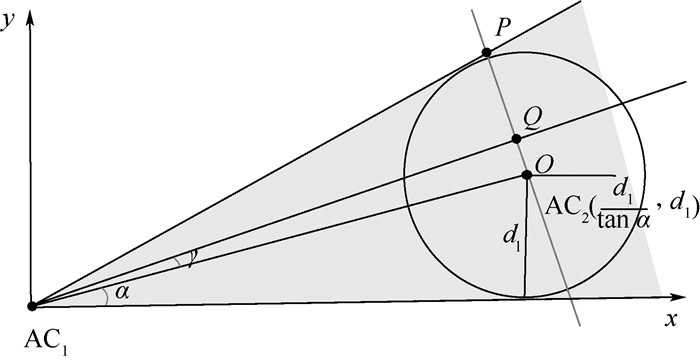
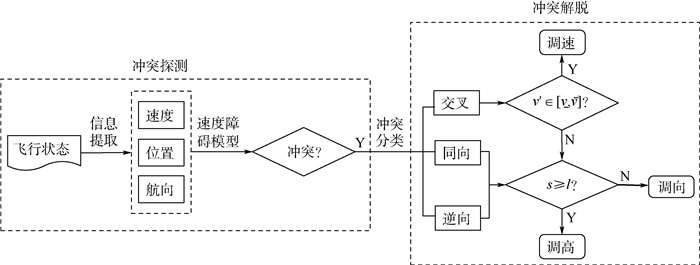
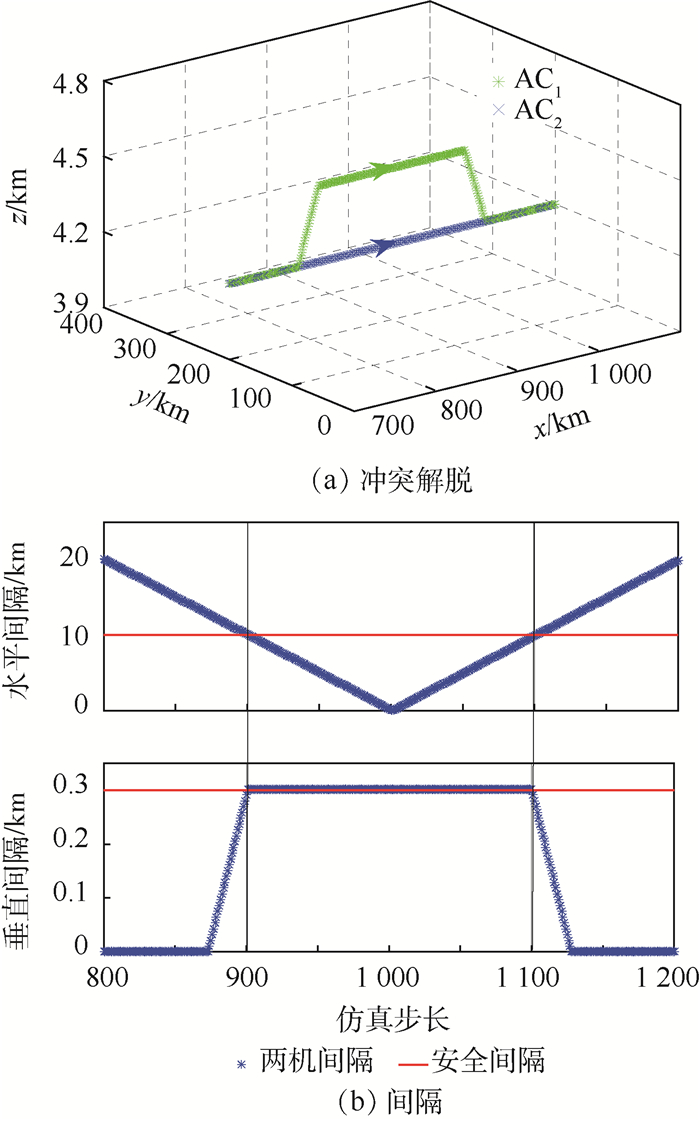
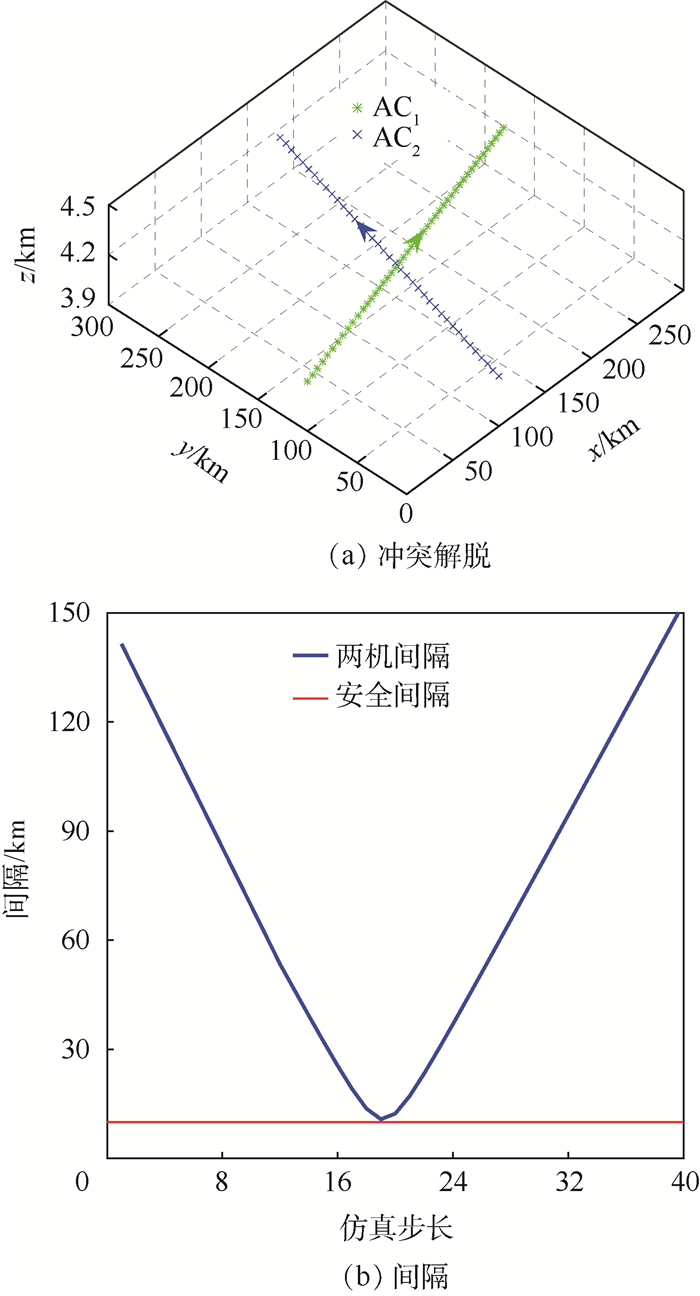
A geometric optimization algorithm is proposed based on velocity obstacle method to solve the problem of flight collision resolution and track recovery. We gave a rigorous mathematical description of the problem. Firstly, according to the relative position and speed relationship between the aircraft, the collision type and whether the conditions of each release strategy are met are determined, and the corresponding resolution strategy is adopted. After the collision was resolved, the plane resumed its flight on the original route. The model can effectively solve flight collision through geometric analysis and theoretical derivation. In addition, the track recovery point and the parameter solving process involved are given in detail. Finally, in the simulation, the algorithm chooses the collision resolution strategy independently according to different scenes. The results show that this method is simple and efficient, and the track recovery redirects the ownership to its original target waypoint without introducing new flight collision.
| [1] |
BILIMORIA K D.A geometric optimization approach to aircraft conflict resolution: AIAA-2000-4265[R].Reston: AIAA, 2000.
|
| [2] |
BILIMORIA K D, SRIDHAR B, CHATTERJI G B.FACET: Future ATM concepts evaluation tool[C]//3rd USA/Europe Air Traffic Management R&D Seminar, 2000. doi: 10.2514/atcq.9.1.1
|
| [3] |
HWANG I, KIM J, TOMLIN C.Protocol-based conflict resolution for air traffic control[C]//7th USA/Europe Air Traffic Management R&D Seminar, 2007. doi: 10.2514/atcq.15.1.1
|
| [4] |
GESER A, MUNOZ C.A geometric approach to strategic conflict detection and resolution[C]//Digital Avionics Systems Conference.Piscataway, NJ: IEEE Press, 2002, 1(6B): 1-11.
|
| [5] |
ZHANG Y, ZHANG M, YU J.Real-time flight conflict detection and release based on multi-agent system[C]//IOP Conference Series: Earth and Environmental Science.Bristol: IOP Publishing, 2018: 032053.
|
| [6] |
GOSS J, RAJVANSHI R, SUBBARAO K.Aircraft conflict detection and resolution using mixed geometric and collision cone approaches: AIAA-2004-4879[R].Reston: AIAA, 2004.
|
| [7] |
MUELLER T, SCHLEICHER D, BILIMORIA K D.Conflict detection and resolution with traffic flow constraints: AIAA-2002-4445[R].Reston: AIAA, 2002.
|
| [8] |
李雄, 徐肖豪, 朱承元.基于几何算法的空中交通改航路径规划[J].系统工程, 2008, 26(8):37-40. doi: 10.3969/j.issn.1001-4098.2008.08.007
LI X, XU X H, ZHU C Y.Air traffic reroute planning based on geometry algorithm[J].Systems Engineering, 2008, 26(8):37-40(in Chinese). doi: 10.3969/j.issn.1001-4098.2008.08.007
|
| [9] |
BERG J V D, LIN M, MANOCHA D.Reciprocal velocity obstacles for real-time multi-agent navigation[C]//2008 IEEE International Conference on Robotics and Automation.Piscataway, NJ: IEEE Press, 2008: 1928-1935.
|
| [10] |
BERG J V D, GUY S, LIN M, et al.Reciprocal n-body collision avoidance[C]//The 14th International Symposium ISRR.Berlin: Springer, 2011: 3-19.
|
| [11] |
DURAND N, BARNIER N.Does ATM need centralized coordination Autonomous conflict resolution analysis in a constrained speed environment[C]//11th USA/E Air Traffic Management R&D Seminar, 2015. doi: 10.2514/atcq.23.4.325
|
| [12] |
ALLIGNOL C, BARNIER N, DURAND N, et al.Assessing the robustness of a UAS detect & avoid algorithm[C]//12th USA/Europe Air Traffic Management R&D Seminar, 2017.
|
| [13] |
杨秀霞, 周硙硙, 张毅.基于速度障碍圆弧法的UAV自主避障规划研究[J].系统工程与电子技术, 2017, 39(11):168-176.
YANG X X, ZHOU W W, ZHANG Y.Automatic obstacle-avoidance planning for UAV based on velocity obstacle arc method[J].Systems Engineering and Electronics, 2017, 39(11):168-176(in Chinese).
|
| [14] |
杨秀霞, 张毅, 周硙硙.一种动态不确定环境下UAV自主避障算法[J].系统工程与电子技术, 2017, 39(11):2546-2552. doi: 10.3969/j.issn.1001-506X.2017.11.23
YANG X X, ZHANG Y, ZHOU W W.Automatic obstacle avoidance algorithm for UAV in dynamic uncertain environment[J].Systems Engineering and Electronics, 2017, 39(11):2546-2552(in Chinese). doi: 10.3969/j.issn.1001-506X.2017.11.23
|
| [15] |
蒋旭瑞, 吴明功, 温祥西, 等.基于合作博弈的多机飞行冲突解脱策略[J].系统工程与电子技术, 2018, 40(11):2482-2490. doi: 10.3969/j.issn.1001-506X.2018.11.14
JIANG X R, WU M G, WEN X X, et al.Conflict resolution of multi-aircraft based on the cooperative game[J].Systems Engineering and Electronics, 2018, 40(11):2482-2490(in Chinese). doi: 10.3969/j.issn.1001-506X.2018.11.14
|
| [16] |
吴明功, 王泽坤, 温祥西, 等.飞行冲突解脱的几何优化模型[J].系统工程与电子技术, 2019, 41(4):863-869.
WU M G, WANG Z K, WEN X X, et al.Aircraft conflict resolution model based on geometric optimization[J].Systems Engineering and Electronics, 2019, 41(4):863-869(in Chinese).
|


Figures(14) / Tables(3)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

Li Nuo, Jin Maozhong, Liu Chaoet al. Implementation and evaluation of measurement tool for Java[J]. Journal of Beijing University of Aeronautics and Astronautics, 2005, 31(02): 128-133. (in Chinese)





 DownLoad:
DownLoad: