| Citation: | YU Jianghang, XU Jun, HUANG Yukeet al. Tracking control for a class of nonlinear systems in feedback form[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(7): 1444-1450. doi: 10.13700/j.bh.1001-5965.2018.0688(in Chinese)

|
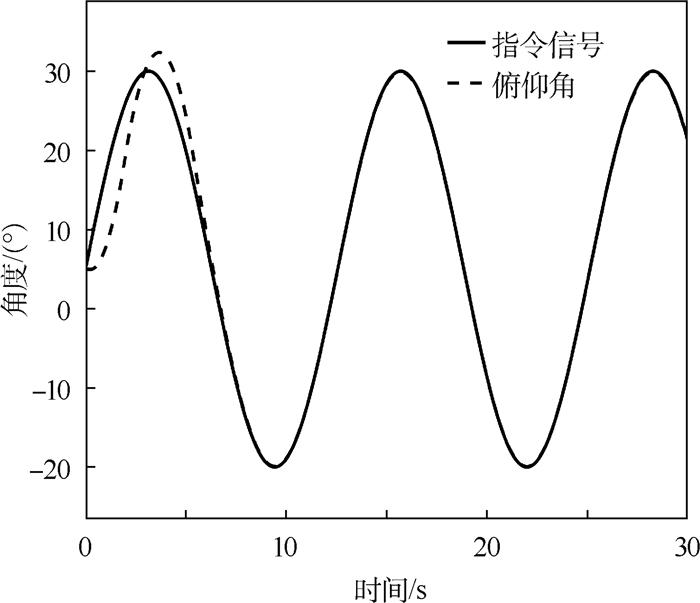
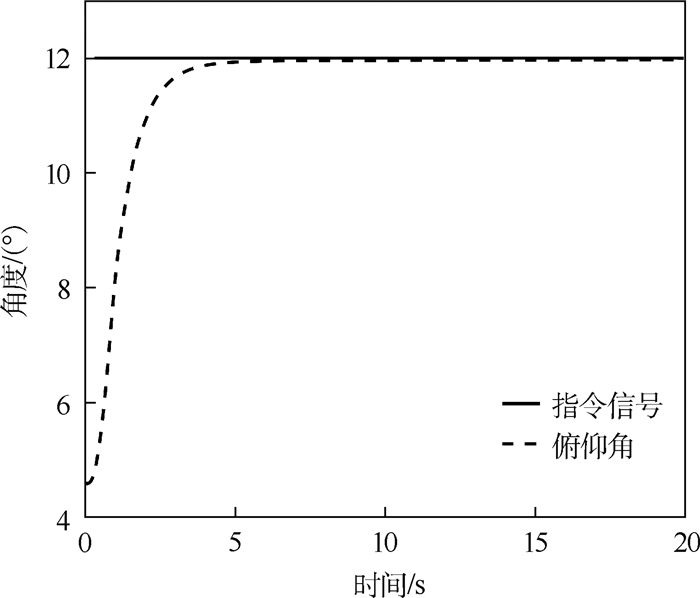
In order to achieve the control of a class of nonlinear systems in feedback form, the system is studied. First, according to LaSalle's invariance principle, the convergence of a class of autonomous systems is proved. The error function is introduced, and the Lyapunov function of the error function is used to find the controller which makes the error function asymptotically stable. Then, according to the lemma, the trajectories tracked by the system states are all converged, so that the system states are bounded and the output of the system converges to input. The condition and the proof of the stability of the closed-loop system are given. Finally, an example of longitudinal dynamics of an fixed-wing aircraft flight control system is presented, and the controller is designed according to the proposed method. The simulation is verified under the Simulink module of MATLAB. The results show that, for step signals and sinusoidal signals, the proposed controller can enable the pitch angle of aircraft to quickly converge the tracking command.
| [1] |
WANG C, WEN C, LIN Y.Adaptive actuator failure compensation for a class of nonlinear systems with unknown control direction[J].IEEE Transactions on Automatic Control, 2016, 62(1):385-392.
|
| [2] |
CAI J, WEN C, SU H, et al.Adaptive backstepping control for a class of nonlinear systems with non-triangular structural uncertainties[J].IEEE Transactions on Automatic Control, 2016, 62(10):5220-5226.
|
| [3] |
FURQON R, CHEN Y J, TANAKA M, et al.An SOS-based control Lyapunov function design for polynomial fuzzy control of nonlinear systems[J].IEEE Transactions on Fuzzy Systems, 2017, 25(4):775-787. doi: 10.1109/TFUZZ.2016.2578339
|
| [4] |
ZHANG W, LI C, HUANG T, et al.Stability and synchronization of memristor-based coupling neural networks with time-varying delays via intermittent control[J].Neurocomputing, 2016, 173(P3):1066-1072.
|
| [5] |
LOZANO R, BROGLIATO B.Adaptive control of robot manipulators with flexible joints[J].IEEE Transactions on Automatic Control, 1992, 37(2):174-181. doi: 10.1109/9.121619
|
| [6] |
KOKOTOVIC P.The joy of feedback:Nonlinear and adaptive[J].IEEE Control Systems Magazine, 1992, 12(3):7-17. doi: 10.1109/37.165507
|
| [7] |
KOKOTOVIC P, ARCAK M.Constructive nonlinear control:A historical perspective[J].Automatica, 2001, 37(5):637-662. doi: 10.1016/S0005-1098(01)00002-4
|
| [8] |
QU Z.Robust control of nonlinear uncertain systems under generalized matching conditions[J].IEEE Transactions on Automatic Control, 1993, 40(8):1453-1460. doi: 10.1016-0005-1098(93)90101-X/
|
| [9] |
HOU Z G, ZOU A M, CHENG L, et al.Adaptive control of an electrically driven nonholonomic mobile robot via backstepping and fuzzy approach[J].IEEE Transactions on Control Systems Technology, 2009, 17(4):803-815. doi: 10.1109/TCST.2009.2012516
|
| [10] |
李海涛, 闫斌.基于自适应反步的DGMSCMG框架伺服系统控制方法[J].北京航空航天大学学报, 2016, 42(4):703-710. https://bhxb.buaa.edu.cn/CN/abstract/abstract13864.shtml
LI H T, YAN B.Adaptive backstepping control method used in DGMSCMG gimbal servo system[J].Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(4):703-710(in Chinese). https://bhxb.buaa.edu.cn/CN/abstract/abstract13864.shtml
|
| [11] |
方一鸣, 任少冲, 王志杰, 等.永磁同步电动机转速自适应模糊Backstepping控制[J].电机与控制学报, 2011, 15(6):97-102. doi: 10.3969/j.issn.1007-449X.2011.06.017
FANG Y M, REN S C, WANG Z J, et al.Adaptive fuzzy Backstepping control for speed of permanent magnet synchronous motor[J].Electric Machines and Control, 2011, 15(6):97-102(in Chinese). doi: 10.3969/j.issn.1007-449X.2011.06.017
|
| [12] |
LASALLE J P.The extent of asymptotic stability[J].Proceedings of the National Academy of Sciences of the United States of America, 1960, 46(3):363-365. doi: 10.1073/pnas.46.3.363
|
| [13] |
徐军, 杨亚炜.飞机电传操纵系统[M].北京:北京理工大学出版社, 2018:65-74.
XU J, YANG Y W.Aircraft fly-by-wire system[M].Beijing:Beijing Institute of Technology Press, 2018:65-74(in Chinese).
|
| [14] |
XU H, MIRMIRANI M, IOANNOU P.Robust neural adaptive control of a hypersonic aircraft: AIAA-2003-5641[R].Reston: AIAA, 2003.
|
| [15] |
WANG Q, STENGEL R F.Robust nonlinear control of a hypersonic aircraft[J].Journal of Guidance, Control, and Dynamics, 2000, 23(1):15-26.
|
| [1] | PENG Yi, SUN Chang, YANG Qingqing, LI Hui, WANG Jianming. Swin Transformer-Based Semantic Image Transmission with Model Division Multiplexing[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0542 |
| [2] | HOU Z Q,DAI N,CHENG M J,et al. Two-branch real-time semantic segmentation algorithm based on spatial information guidance[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(1):19-29 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0980. |
| [3] | LIU W,JIA S L. Robust traffic flow prediction based on graph contrastive learning[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(1):122-133 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0230. |
| [4] | WAN Ru, MA Zi-yuan, GONG Hua-jun, WANG Xin-hua, ZHANG Shuai. Design of unmanned aerial vehicle formation keeping controller based on improved consistency algorithmesign[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0505 |
| [5] | HOU Z Q,CHEN M L,MA J Y,et al. Siamese network visual tracking algorithm based on second-order attention[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(3):739-747 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0373. |
| [6] | LUO Q J,TIAN X,GAO Q J. Rotation binocular stereo rectification algorithm based on hierarchical spatial consistency[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(5):1551-1559 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0611. |
| [7] | ZHANG Wen-ke, HAN Peng, FENG Yu, GAO Dong. Visual-inertial integrated navigation method based on semantic segmentation and geometric constraints in dynamic environment[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0016 |
| [8] | WEI Qing-lan, HE Yu, SONG Jin-bao. A adaptive automatic construction algorithm for sentiment dictionaries based on semantic rules[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0367 |
| [9] | LI Y R,YAO T,ZHANG L L,et al. Image-text matching algorithm based on multi-level semantic alignment[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(2):551-558 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0385. |
| [10] | ZHANG Shunxiang, LIU Jiajia, JIAO Yixuan, ZHANG Yulei, LI Ziliang. Sentiment Representation Calibration-Based Model for Image-Text Sentiment Analysis[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0545 |
| [11] | ZHANG Yi-tian, LUO Xi-ling, WANG Yu-peng. Self-supervised image change detection method based on lightweight capsule network[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023-0251 |
| [12] | CHENG B P,FANG Y W,PENG W S,et al. Comprehensive performance evaluation of swarm intelligence algorithms based on improved radar graph method[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(10):2780-2789 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0726. |
| [13] | SHEN X B,ZHAO W Z,LIN G P,et al. Accuracy analysis of Eulerian method for droplet impingement characteristics under aircraft icing conditions[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(8):1912-1921 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0607. |
| [14] | ZHANG Yun-jie, ZHOU Jie-xin, ZHANG Feng-zhe, ZHOU Rui, ZOU Ting. Reachability Evaluation Method for Ballistic Missile Based on Extended Boundary Method[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0630 |
| [15] | GUO Q,WU T H,XU W,et al. Target tracking algorithm based on saliency awareness and consistency constraint[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(9):2244-2257 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0688. |
| [16] | SHI X S,LIN Z Y. Fixed-time distributed convex algorithm over second-order multi-agent systems under bounded disturbances[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(11):2951-2959 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0060. |
| [17] | WU Y,KONG L,SUN Q Q,et al. Heat transfer path design and heat flow analysis of satellite phased array antenna[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(5):1127-1134 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0373. |
| [18] | HE F D,WU B,LI Z R. Zone loading technology for aircraft load calibration test[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(10):2867-2872 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0742. |
| [19] | DONG Leiting, HE Shuangxin. SGBEM-FEM coupling for thermoelastic fracture mechanics analysis of rotational components[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(9): 1702-1709. doi: 10.13700/j.bh.1001-5965.2022.0140 |
| [20] | WANG Shaoping, CHEN Rentong, ZHANG Chao. Reliability estimation for aircraft hydraulic pump based on bivariate performance degradation analysis[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(9): 1613-1623. doi: 10.13700/j.bh.1001-5965.2022.0297 |

Figures(4)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

Zhai Yu, Su Donglin. Ambiguity of rotating-element electric-field vector method and elimination method[J]. Journal of Beijing University of Aeronautics and Astronautics, 2012, (11): 1450-1453. (in Chinese)





 DownLoad:
DownLoad: