| Citation: | WANG Qi, WANG Lixin, ZHOU Xiaogang, et al. Attitude quaternion continuous self-calibration model of hybrid inertial navigation system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(7): 1424-1434. doi: 10.13700/j.bh.1001-5965.2018.0691(in Chinese)

|
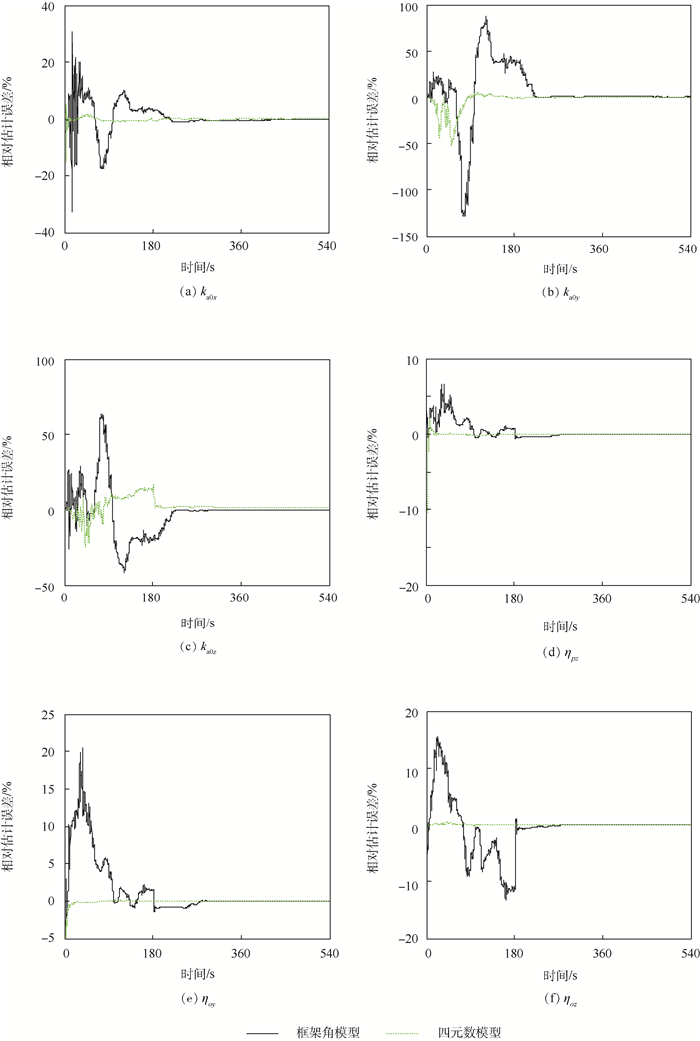
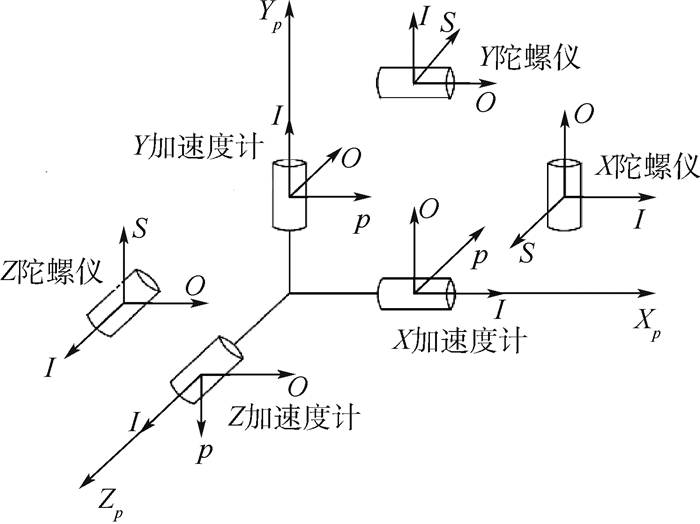
As a kind of new inertial navigation system, the hybrid inertial navigation system has the characteristics of three-axis physical platform, strapdown attitude algorithm and installed self-calibration. Based on these characteristics and in order to improve the accuracy of hybrid inertial navigation system the attitude quaternion is used to replace the traditional Euler angle to represent the rotation of three-axis physical platform in the continuous self-calibration, and the attitude quaternion continuous self-calibration model of hybrid inertial navigation system based on the gimbal angle equation is established for its error coefficient estimation.Then a quaternion unscented Kalman filter based on singular value decomposition (SVD-QUKF) is proposed by improving the traditional unscented Kalman filter (UKF) based on the characteristics of the attitude quaternion model. The simulation and experimental results prove that the proposed attitude quaternion continuous self-calibration model based on the SVD-QUKF can calibrate all the error coefficients of hybrid inertial navigation system with the relative error less than 1%, and the calibration precision and the computing speed are better than the traditional gimbal angle model based on UKF.
| [1] |
冯培德.论混合式惯导系统[J].中国惯性技术学报, 2016, 24(3):281-284.
FENG P D.On hybrid inertial navigation systems[J].Journal of Chinese Inertial Technology, 2016, 24(3):281-284(in Chinese).
|
| [2] |
JACKSON D J.Continuous calibration and alignment techniques for an all-attitude inertial platform: AIAA-73-865[R].Reston, VA: AIAA, 1973.
|
| [3] |
CAO Y, CAI H, ZHANG S F, et al.A new continuous self-calibration scheme for a gimbaled inertial measurement unit[J].Measurement Science and Technology, 2012, 23(1):385-394.
|
| [4] |
杨华波.惯性测量系统误差标定及分离技术研究[D].长沙: 国防科学技术大学, 2008.
YANG H B.Research on error calibration and separation for inertial measurement systems[D].Changsha: National University of Defense Technology, 2008(in Chinese).
|
| [5] |
曹渊, 张士峰, 杨华波, 等.惯导平台误差快速自标定方法研究[J].宇航学报, 2011, 32(6):1281-1287. doi: 10.3873/j.issn.1000-1328.2011.06.012
CAO Y, ZHANG S F, YANG H B, et al.Research on rapid self-calibration method for inertial platform[J].Journal of Astronautics, 2011, 32(6):1281-1287(in Chinese). doi: 10.3873/j.issn.1000-1328.2011.06.012
|
| [6] |
丁智坚, 蔡洪, 杨华波, 等.浮球式惯性平台连续翻滚自标定自对准方法[J].国防科技大学学报, 2015, 37(3):148-154.
DING Z J, CAI H, YANG H B, et al.Continuous self-calibration and self-alignment method for floated inertial platform[J].Journal of National University of Defense Technology, 2015, 37(3):148-154(in Chinese).
|
| [7] |
许永飞, 张士峰.惯导平台自标定中安装误差可观性分析[J].中国惯性技术学报, 2015, 23(5):575-579.
XU Y F, ZHANG S F.Observability analysis of IMU's misalignment angles in self-calibration for inertial platform[J].Journal of Chinese Inertial Technology, 2015, 23(5):575-579(in Chinese).
|
| [8] |
连丁磊, 夏刚, 王汀, 等.基于陀螺仪敏感轴系的平台连续翻滚自标定算法[J].导弹与航天运载技术, 2013(2):24-29.
LIAN D L, XIA G, WANG T, et al.Self-calibration algorithm of inertial navigation platform continuous tumble based on gyro sensitive shaft system[J].Missiles and Space Vehicles, 2013(2):24-29(in Chinese).
|
| [9] |
CHOUKROUN D, BAR-ITZHACK I Y, OSHMAN Y.Novel quaternion Kalman filter[J].IEEE Transactions on Aerospace and Electronic Systems, 2006, 42(1):174-190. doi: 10.1109/TAES.2006.1603413
|
| [10] |
XUE L, YUAN W Z, CHANG H L, et al.Application of quaternion-based extended Kalman filter for MAV attitude estimation using MEMS sensors[J].Nanotechnology and Precision Engineering, 2009, 7(2):163-167.
|
| [11] |
XU X S, ZHOU F, ZHANG T, et al.Initial alignment algorithm for SINS based on quaternion adaptive Kalman filter[J].Journal of Chinese Inertial Technology, 2016, 24(4):454-459.
|
| [12] |
XU C X, WU G, SHI C, et al.Temperature compensation model research on fiber optic gyroscope[J].Optical Technique, 2014, 40(6):492-498. doi: 10.3788/GXJS
|
| [13] |
王琪, 汪立新, 秦伟伟, 等.基于双回路扩展卡尔曼滤波的惯性平台连续自标定[J].宇航学报, 2017, 38(6):621-629.
WANG Q, WANG L X, QIN W W, et al.Continuous self-calibration of inertial platform based on dual extend Kalman filter[J].Journal of Astronautics, 2017, 38(6):621-629(in Chinese).
|
| [14] |
谭兴龙, 王坚, 李增科.基于SVD的改进抗差UKF算法及在组合导航中的应用[J].控制与决策, 2014, 29(10):1744-1750.
TAN X L, WANG J, LI Z K.SVD aided improved robust UKF algorithm and its application for integration navigation[J].Control and Decision, 2014, 29(10):1744-1750(in Chinese).
|
| [15] |
LIU Y, YU A X, ZHU J B, et al.Unscented Kalman filtering in the additive noise case[J].Science China:Technology Sciences, 2010, 53(4):929-941. doi: 10.1007/s11431-010-0119-z
|
| [16] |
AINSCOUGH T, ZANETTI R, CHRISTIAN J, et al.Q-method extend Kalman filter[J].Journal of Guidance, Control, and Dynamics, 2015, 38(4):752-760. doi: 10.2514/1.G000118
|
| [17] |
杨华波, 蔡洪, 张士峰, 等.高精度惯性平台连续自标定自对准技术[J].宇航学报, 2006, 27(4):600-604. doi: 10.3321/j.issn:1000-1328.2006.04.006
YANG H B, CAI H, ZHANG S F, et al.Continuous calibration and alignment techniques for a high precision inertial platform[J].Journal of Astronautics, 2006, 27(4):600-604(in Chinese). doi: 10.3321/j.issn:1000-1328.2006.04.006
|
| [1] | ZHANG Yiqing, HUANG Tingshuang, LI Yongxiang, YANG Yanchu, XU Guoning. Analysis impact of spherical reflection on solar cell calibration[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0772 |
| [2] | FU Shangyu, YU Tianze, LIN Chunyu, LIU Xianhui, ZHAO Yao. Joint pose calibration algorithm for vehicle surrounding-view systems based on spatiotemporal fusion[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0454 |
| [3] | CAO Ziyu, YANG Jianhua. Nonlinear Optimization-based Online Temporal Calibration of Stereo Camera and IMU in Stereo Visual-Inertial Odometry[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0374 |
| [4] | CAO Y,CHENG Y H,GAO B,et al. Effectiveness evaluation method for earth observation satellite attitude control system[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(5):1655-1664 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0489. |
| [5] | ZHANG Yonghua, WANG Zheng, WANG Shiyu, BAI Yunfei, QIU Likuan. Robust Guidance Method for Reusable Rocket Landing Phase based on UMPSP[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0491 |
| [6] | WANG D,YANG J,XIONG K. Autonomous navigation method of satellite constellation based on adaptive UKF[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(8):2655-2666 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0696. |
| [7] | ZHAO H Z,WEI G H,PAN X D,et al. Dual-frequency continuous wave pseudo-signal interference effect in swept-frequency radar[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(9):2843-2851 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0739. |
| [8] | NIE Li, LI Chenliang, LIU Wangkui, SHEN Haidong, LIU Yanbin, CHEN Jinbao. Adaptive neural network based fixed-time command-filtered control for quadrotor unmanned aerial vehicles[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0403 |
| [9] | WANG L F,ZOU T,REN Y,et al. Fine alignment method for biaxial redundant rotating inertial navigation system[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(11):3348-3357 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0818. |
| [10] | ZHAO T M,HOU J X,LIU Y W. Influence mechanism of continuous curvature shaping method on buzz-saw noise[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(4):922-931 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0342. |
| [11] | ZHANG P H,TANG Y,TANG J,et al. Simulation of cavity flow at high Mach number based on adaptive unstructured hybrid mesh[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(6):1311-1318 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0424. |
| [12] | YAN H B,XU W B,HUANG L E. Design of quadrotor attitude controller based on improved ADRC[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(12):3283-3292 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0129. |
| [13] | DENG B H,XU J F. Active disturbance rejection control of attitude of compound unmanned helicopter[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(11):3100-3107 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0788. |
| [14] | WANG R P,SONG X,CHEN K,et al. Pedestrian trajectory prediction method based on pedestrian pose[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(7):1743-1754 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0557. |
| [15] | Ruan Shilong, Dong Zhe, Sun Yao, Qu Xiaolei, Huo Shaoze. Research on Parameter Optimization Method of Thrust Vector/ Pneumatic Rudder Composite Control Law for Aircraft Based on Singular Value Method[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0227 |
| [16] | GONG Xiaoquan, WU Xiaojun, TANG Jing, LI Ming, ZHANG Jian. Application of r-grid adaptive for shock capturing in discontinuous Galerkin finite element method[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(10): 1889-1898. doi: 10.13700/j.bh.1001-5965.2021.0046 |
| [17] | SHAO Xin, JI Li, ZOU Huaiwu, XIE Yangmin. A parameter calibration method for manipulators based on laser displacement measurement[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(11): 2281-2288. doi: 10.13700/j.bh.1001-5965.2021.0093 |
| [18] | WU Lan, WU Yuanming, KONG Fanshi, LI Binquan. Traffic signal timing method based on deep reinforcement learning and extended Kalman filter[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(8): 1353-1363. doi: 10.13700/j.bh.1001-5965.2021.0529 |
| [19] | PENG Yan, GUO Junbin, YU Chuanqiang, KE Bing. Calibration method for high precision camera based on plane transformation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(7): 1297-1303. doi: 10.13700/j.bh.1001-5965.2021.0015 |
| [20] | SHU Hong-bin, YU Chuan-qiang, LIU Zhi-hao, TANG Sheng-jin, CHEN Jian-wei. State estimation of multi-axle special vehicles by fusion of neural network and unscented Kalman filter[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2022.0535 |
| 1. | 贾勇,刘生攀,杨银川,周普莉,杜晶晶. 某型惯组系统级标定算法研究与应用. 飞控与探测. 2024(03): 78-85 .  | |
| 2. | 魏栋,付强文,李炽融,李四海,陶渊博. 混合式惯性导航系统平台转动控制算法设计. 中国惯性技术学报. 2024(11): 1061-1068 . | |
| 3. | 柏思忠. 井下巷道内智能传感器移动轨迹研究. 工矿自动化. 2022(02): 49-54 . | |
| 4. | 柏思忠. 矿用智能传感器自主定位研究. 煤矿安全. 2022(07): 135-140 . | |
| 5. | 赵震,米智楠,杨群慧,吴正伟,金璐. 二段式自适应无迹卡尔曼姿态估计算法. 机电一体化. 2021(Z1): 3-10 . | |
| 6. | 汤心怡,戴建峰,叶萌,张浩宇. 基于MPU-6050芯片的固定翼飞行器自稳设计. 信息与电脑(理论版). 2020(03): 20-23 . | |
| 7. | 周锐俊. 关于惯性导航系统的车辆自动. 电子测试. 2019(14): 34-35 . |

Figures(4) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

WANG Qi, WANG Lixin, ZHOU Xiaogang, et al. Attitude quaternion continuous self-calibration model of hybrid inertial navigation system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(7): 1424-1434. doi: 10.13700/j.bh.1001-5965.2018.0691(in Chinese)





 DownLoad:
DownLoad: