| Citation: | GAO Yang, WU Wenhai, JI Shaokang, et al. High-order LADRC based robust coordinated decoupling control for V/STOL aircraft in hover/translation mode[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(9): 1812-1823. doi: 10.13700/j.bh.1001-5965.2018.0758(in Chinese)

|
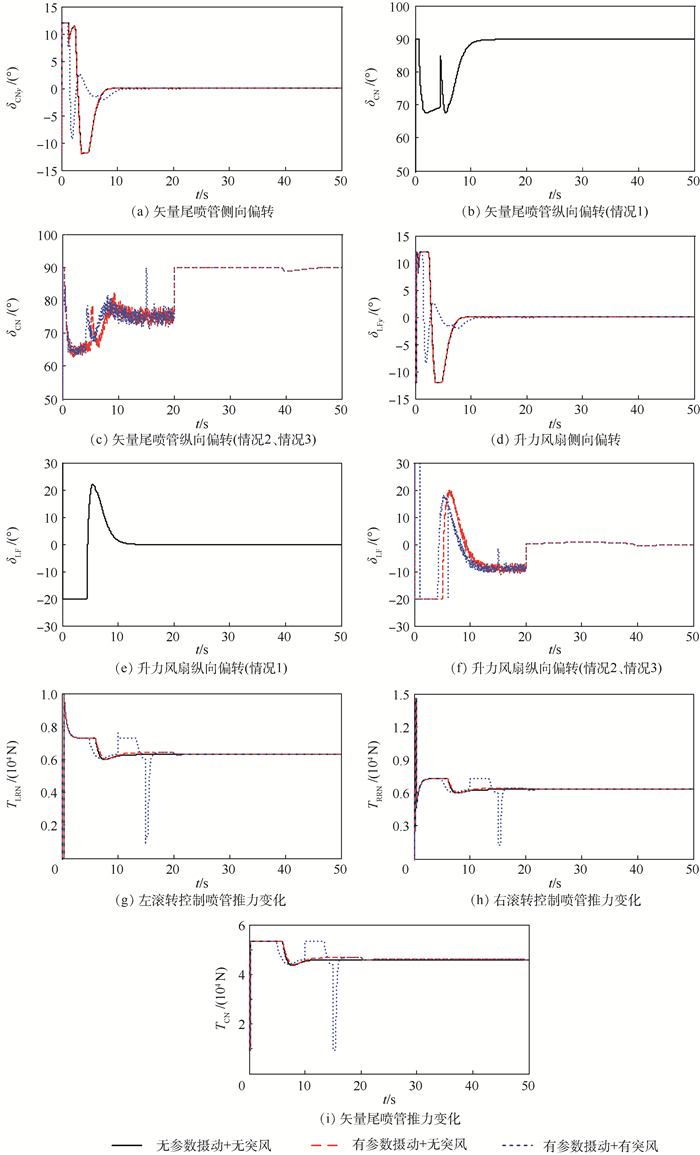
To deal with the issue of dynamic coupling, thrust vector control redundancy and vulnerability to disturbed wind for vertical and/or short take-off and landing (V/STOL) aircraft in hover/translation mode, a robust coordinated decoupling flight control method based on high-order linear active disturbance rejection control (LADRC) is proposed. Firstly, the thrust vector model and the nonlinear hover/translation motion model under the disturbed wind are established according to the concept of V/STOL aircraft. On this basis, the coordinated control strategy of attitude and position is given in this mode. Then by transforming the control variables, six active disturbance rejection decoupling control laws are designed, which refrains from the redundant control of multiple thrust vectors using LADRC to compensate the total disturbances in real time. Simulation results show the effectiveness of the LADRC applied to hover/translation control and the robustness of the designed control laws for aircraft internal parameter perturbation and external gust disturbance.
| [1] |
索德军, 梁春华, 张世福, 等.S/VTOL战斗机及其推进系统的技术研究[J].航空发动机, 2014, 40(4):7-13.
SUO D J, LIANG C H, ZHANG S F, et al.Technology of short/vertical takeoff and landing fighter and propulsion system[J].Aeroengine, 2014, 40(4):7-13(in Chinese).
|
| [2] |
MADDOCK I A, HIRSCHBERG M J.The quest for stable jet borne vertical lift: ASTOVL to F-35 STOVL: AIAA-2011-6999[R].Reston: AIAA, 2011.
|
| [3] |
WANG X Y, ZHU J H, ZHANG Y J.Dynamics modeling and analysis of thrust-vectored V/STOL aircraft[C]//Proceedings of the 32nd Chinese Control Conference.Piscataway, NJ: IEEE Press, 2013: 1825-1830.
|
| [4] |
TIAN Y, HE Y, LI X Y, et al.Simulation testing method of V/STOL flight control strategy[C]//Proceedings of the 10th World Congress on Intelligent Control and Automation.Piscataway, NJ: IEEE Press, 2012: 1969-1975.
|
| [5] |
HAUSER J, SASTRY S, MEYER G.Nonlinear control design for slightly non-minimum phase systems:Application to V/STOL aircraft[J].Automatica, 1992, 28(4):665-679. doi: 10.1016/0005-1098(92)90029-F
|
| [6] |
LIN F, ZHANG W, BRANDT R D.Robust hovering control of a PVTOL aircraft[J].IEEE Transactions on Control Systems Technology, 1999, 7(3):343-351. doi: 10.1109/87.761054
|
| [7] |
CHWA D.Fuzzy adaptive output feedback tracking control of VTOL aircraft with uncertain input coupling and input-dependent disturbances[J].IEEE Transactions on Fuzzy Systems, 2015, 23(5):1505-1518. doi: 10.1109/TFUZZ.2014.2362554
|
| [8] |
CARLOS A I, MIGUEL S S C, JULIO M M, et al.Output feedback stabilization for the PVTOL aircraft system based on an exact differentiator[J].Journal of Intelligent and Robotic Systems, 2018, 90(3-4):443-454. doi: 10.1007/s10846-017-0660-0
|
| [9] |
FAN Y, ZHU J H, MENG X Y, et al.Intelligent method based coordinated integrated flight control of a tailless STOVL[C]//Proceedings of the 8th World Congress on Intelligent Control and Automation.Piscataway, NJ: IEEE Press, 2010: 85-90.
|
| [10] |
ZHANG Y, ZUO J, ZHANG B.Modularized modeling and inversed dynamics control design for a lift-fan UAV in hover[C]//Proceedings of the IEEE International Conference on Information and Automation.Piscataway, NJ: IEEE Press, 2013: 570-575.
|
| [11] |
KUANG M C, ZHU J H.Hover control of a thrust-vectoring aircraft[J].Science China Information Sciences, 2015, 58(7):1-5. http://www.cnki.com.cn/Article/CJFDTotal-JFXG201507016.htm
|
| [12] |
GUO B Z, ZHAO Z L.On convergence of nonlinear active disturbance rejection for SISO systems[C]//Proceedings of the 24th Chinese Control and Decision Conference.Piscataway, NJ: IEEE Press, 2012: 3507-3512.
|
| [13] |
QI X H, LI J, XIA Y Q, et al.On the robust stability of active disturbance rejection control for SISO systems[J].Circuits, Systems, and Signal Processing, 2017, 36(1):65-81. doi: 10.1007/s00034-016-0302-y
|
| [14] |
XUE W, HUANG Y.Performance analysis of 2-DOF tracking control for a class of nonlinear uncertain systems with discontinuous disturbances[J].International Journal of Robust Nonlinear Control, 2018, 28(4):1456-1473. doi: 10.1002/rnc.v28.4
|
| [15] |
LI Z Y, LI X M, ZHOU Z Y.Active disturbance rejection controller for loitering unit with parameter uncertainty[C]//Proceedings of the 16th International Conference on Control, Automation and Systems.Piscataway, NJ: IEEE Press, 2016: 140-144.
|
| [16] |
LONG Y, DU Z J, CONG L, et al.Active disturbance rejection control based human gait tracking for lower extremity rehabilitation exoskeleton[J].ISA Transactions, 2017, 67:389-397. doi: 10.1016/j.isatra.2017.01.006
|
| [17] |
GAO Z Q.Scaling and bandwidth-parameterization based controller tuning[C]//Proceedings of the American Control Conference.Piscataway, NJ: IEEE Press, 2003: 4989-4996.
|
| [18] |
ZHENG Q, GAO Z Q, GAO L Q.On stability analysis of active disturbance rejection control for nonlinear time-varying plants with unknown dynamics[C]//Proceedings of the 46th IEEE Conference on Decision and Control.Piscataway, NJ: IEEE Press, 2007: 3501-3506.
|
| [19] |
高阳, 吴文海, 高丽.高阶不确定非线性系统的线性自抗扰控制[J/OL].控制与决策, (2018-10-12)[2018-11-02].
GAO Y, WU W H, GAO L.Linear active disturbance rejection control for high-order nonlinear systems with uncertainty[J/OL].Control and Decision, (2018-10-12)[2018-11-02].in Chinese).
|
| [20] |
FRANKLIN J A.Revised simulation model of the control system, displays, and propulsion system for a ASTOVL lift fan aircraft: NASA-TM-112208[R].Washington, D.C.: NASA, 1997.
|
| [21] |
BIRCKELBAW L G, MCNEILL W E, WARDWELL D A.Aerodynamics model for a generic ASTOVL lift-fan aircraft: NASA-TM-110347[R].Washington, D.C.: NASA, 1995.
|
| [22] |
GUO B Z, ZHAO Z L.On convergence of tracking differentiator and application to frequency estimation of sinusoidal signals[C]//Proceedings of the 8th Asian Control Conference.Piscataway, NJ: IEEE Press, 2011: 1470-1475.
|
| [1] | SUN X M,MA X,LIU Y,et al. Adaptive sliding mode region reaching control for uncertain nonlinear systems[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(8):2482-2491 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0647. |
| [2] | WEI Zhiqiang, XIAO Xinlong. Vertiport operational task planning model and capacity estimation method[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0249 |
| [3] | CHANG Z N,HU M H,ZHANG Y,et al. A multi-objective optimal control trajectory optimization method for aircraft under wind influence[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(11):3521-3531 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0836. |
| [4] | BAI F C,YANG X X,DENG X L,et al. Station keeping control for aerostat in wind fields based on deep reinforcement learning[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(7):2354-2366 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0629. |
| [5] | KONG Lingwei, LI Weiqi. Optimization of aircraft speed vector control based on Hp adaptive Pseudo-spectral method[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0405 |
| [6] | WANG H B,HE H,ZOU H J,et al. Nonlinear backstepping control of special EHA for rail grinding vehicles[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(8):2439-2448 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0681. |
| [7] | QUAN Q,CHEN L. Control of non-affine nonlinear systems: A survey[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(8):2367-2381 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0642. |
| [8] | TIAN Xinyu, WANG Shaoping, WANG Xingjian, ZHANG Yuwei, WEI Yi. Ankle prosthesis control method inspired by central pattern generator[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0665 |
| [9] | CHANG Jiaming, LI Sulan, DUAN Xuechao, ZHANG Wei, WANG Chenyang. Anti-stochastic disturbance control of airship[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0489 |
| [10] | ZHEN X D,WANG Z A,HU R C,et al. Aircraft flight qualities of short take-off and vertical landing[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(5):1576-1585 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0413. |
| [11] | LIN Junting, CHEN Xinzhou. Sliding mode control of magnetic levitation ball systems based on high-gain disturbance observer[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0518 |
| [12] | SU Zi-kang, CHEN Jia, LI Xue-bing, LI Chun-tao. Coordinated Control of Transition Flight Position and Attitude for Quad Tilt-Rotor UAV[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0622 |
| [13] | HE Xiongfeng, LU Wei, XU Nuo, ZHOU Qixian, WANG Pengcheng, ZHANG Yonghe. Disturbance Rejection Model Predictive Control for Building Drag-free Steady State[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0380 |
| [14] | MENG Z P,YANG L Q,WANG B,et al. ADRC design for folding wing vehicles based on improved equilibrium optimization algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(8):2449-2460 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0698. |
| [15] | DUAN Leqiang, LI Lei, WANG Weijie, ZHU Hongye, PANG Weikun, REN Yuan. Dynamics Modeling and Active disturbance rejection control of Magnetically Suspended Universally Stabilized Platform[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0065 |
| [16] | WEI Kun-yu, LI Chen-di, LI Bo-wen, YUAN Yuan, HE Xiao-fan. Research on Developing Design Gust Load Spectrum for Bomber-Mounted Air-to-Ground Missiles[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0126 |
| [17] | DENG B H,XU J F. Active disturbance rejection control of attitude of compound unmanned helicopter[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(11):3100-3107 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0788. |
| [18] | CUI K K,HAN W,LIU Y J,et al. Automatic wave-off control algorithm for carrier aircraft based on DM-DSC[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(4):900-912 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0362. |
| [19] | XIA L C,WANG S Y,ZHANG J,et al. Bi-bandwidth extended state observer based disturbance rejection control method and its application on UAV[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(5):1201-1208 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0411. |
| [20] | YIN Zengyuan, CAI Yuanwen, REN Yuan, WANG Weijie, CHEN Xiaocen, YU Chunmiao. Decoupled active disturbance rejection control method for magnetically suspended rotor based on state feedback[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(7): 1210-1221. doi: 10.13700/j.bh.1001-5965.2021.0021 |
| 1. | Yunlong Hu,Jia Song,Mian Wu. A Review of Control Methods for Tailless Aircraft. Guidance, Navigation and Control. 2024(04): 5-36 .  | |
| 2. | 刘亮,陶呈纲,薛艺璇,甄子洋,曹红波. 基于增量动态逆的V/STOL飞机悬停段控制. 飞行力学. 2022(04): 27-33 . |


Figures(3) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

Zhang Jinbai, Zheng Zhaohu. Direct numerical simulation of turbulent channel flow of polymer solution[J]. Journal of Beijing University of Aeronautics and Astronautics, 2009, 35(12): 1417-1420. (in Chinese)




 DownLoad:
DownLoad: