| Citation: | YIN Zengyuan, CAI Yuanwen, REN Yuan, et al. Decoupled active disturbance rejection control method for magnetically suspended rotor based on state feedback[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(7): 1210-1221. doi: 10.13700/j.bh.1001-5965.2021.0021(in Chinese)

|
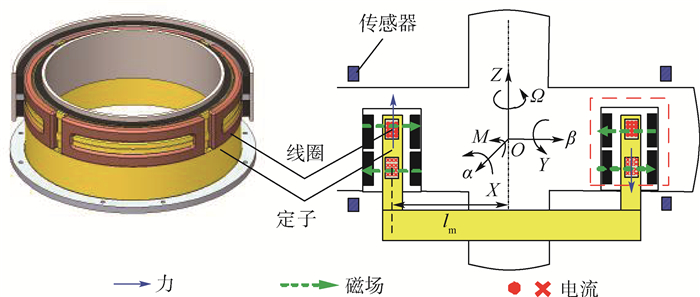
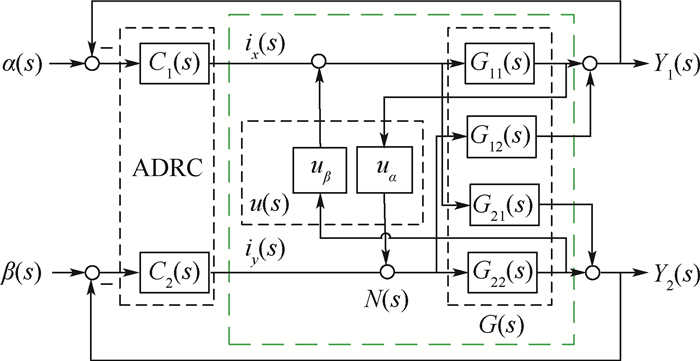
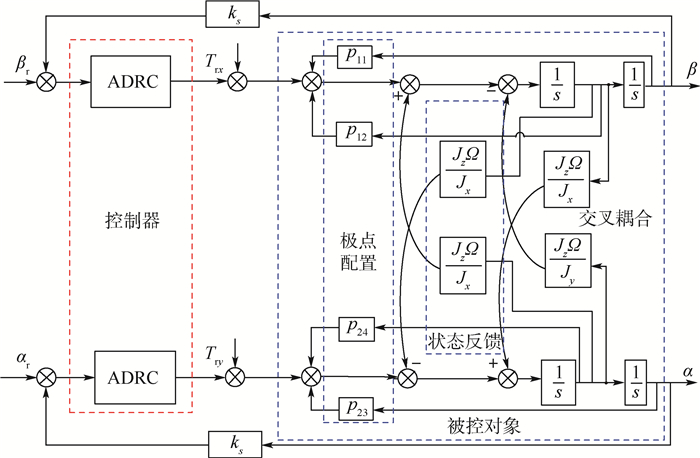
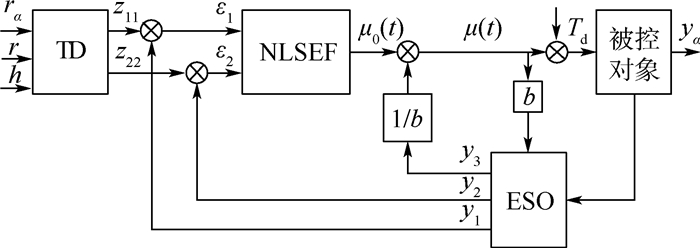
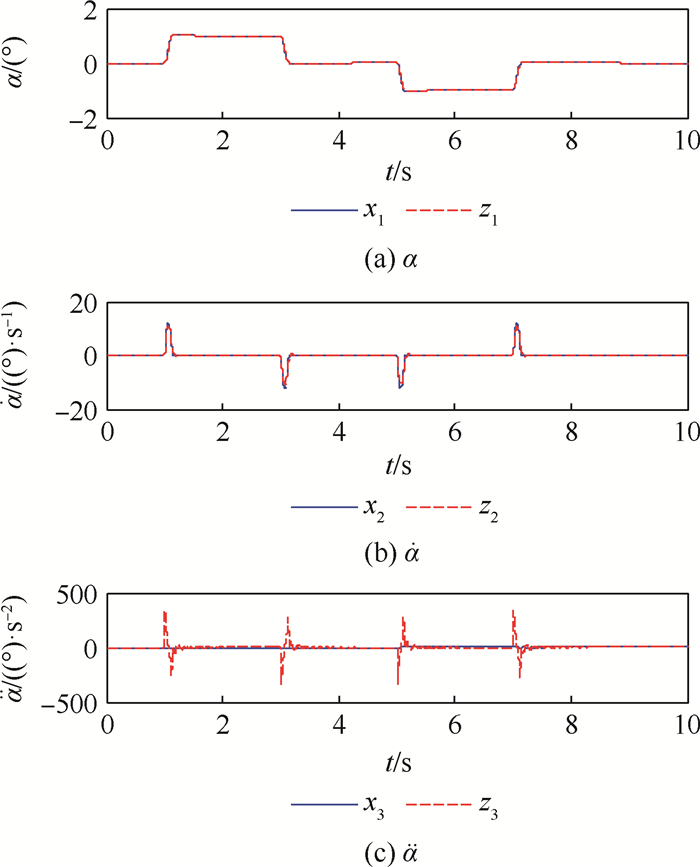
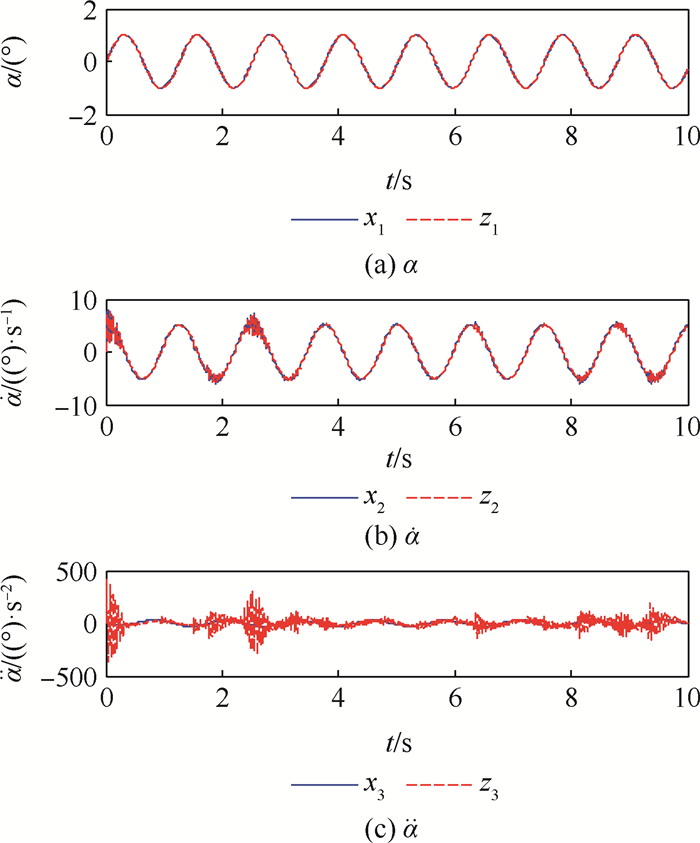
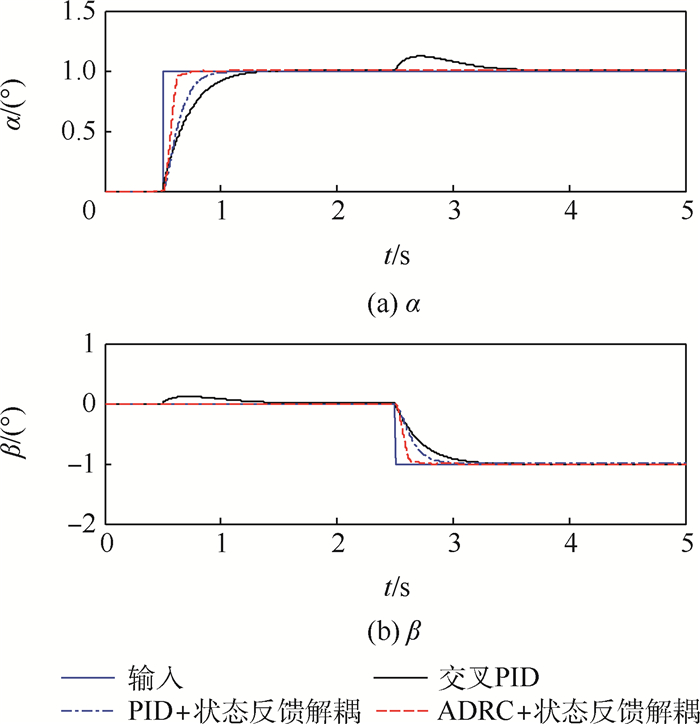
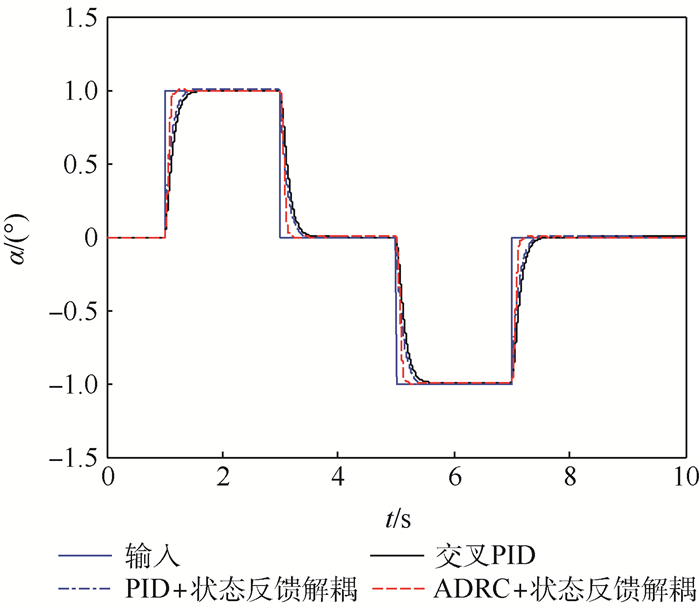
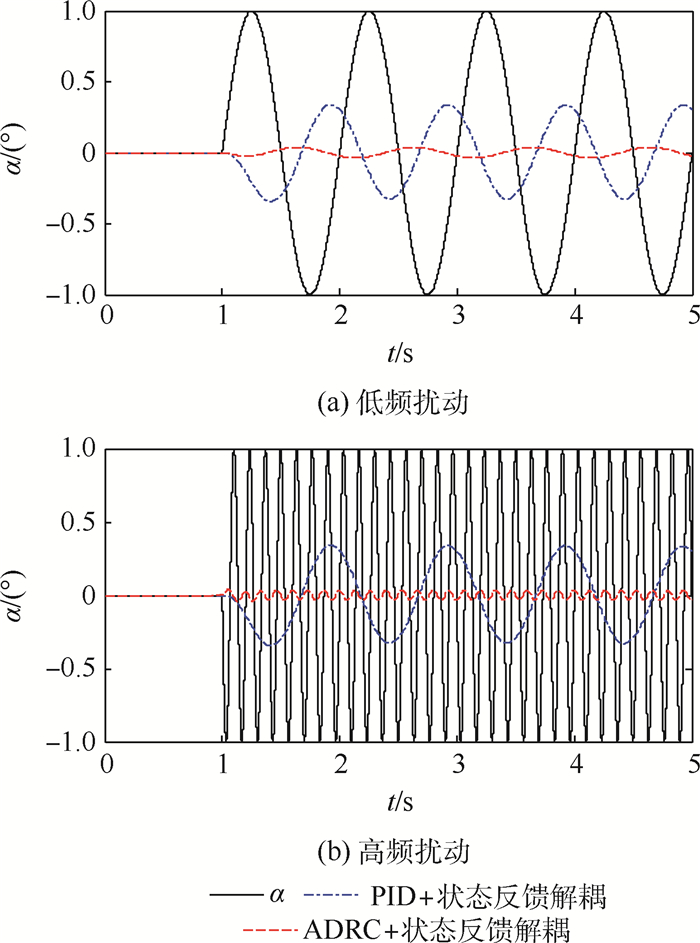
A decoupled anti-interference control method for rotor tilting is proposed to address the strong coupling of rotor deflection channels of magnetically suspended control and sensitive gyroscope (MSCSG), as well as disturbance instability during spacecraft attitude measurement. The coupling of rotors tilting with two degrees of freedom is analyzed, and a decoupling controller is designed based on state feedback. The MSCSG interference torque to the magnetically suspended rotor produced by attitude motions during spacecraft attitude measurement is deduced. The anti-interference control of the rotor is realized by the active disturbance rejection control (ADRC). The tracking performance and stability of the constructed extended state observer (ESO) are analyzed. The stability of the system with bounded inputs is achieved by adjusting the nonlinear state error feedback coefficients. Simulation results show that the state feedback decoupling can realize the complete decoupling of tilting freedom degrees, that ESO has good tracking performance, and that ADRC has better anti-interference performance than the traditional PID control method.

| [1] |
SUN L, ZHENG Z. Disturbance observer-based robust back-stepping attitude stabilization of spacecraft under input saturation and measurement uncertainty[J]. IEEE Transactions on Industrial Electronics, 2017, 64(10): 7994-8002. doi: 10.1109/TIE.2017.2694349
|
| [2] |
SUN L, HUO W, JIAO Z. Adaptive backstepping control of spacecraft rendezvous and proximity operations with input saturation and full-state constraint[J]. IEEE Transactions on Industrial Electronics, 2017, 64(1): 480-492. doi: 10.1109/TIE.2016.2609399
|
| [3] |
XU S, CUI N, FAN Y, et al. Active vibration suppression of flexible spacecraft during attitude maneuver with actuator dynamics[J]. IEEE Access, 2018, 6: 35327-35337. doi: 10.1109/ACCESS.2018.2851665
|
| [4] |
LIN Z, LIN S, WU S, et al. Vibration control of a flexible spacecraft system with input backlash[J]. IEEE Access, 2019, 7: 87017-87026. doi: 10.1109/ACCESS.2019.2926516
|
| [5] |
SI H, SHAO X, ZHANG W. MLP-based neural guaranteed performance control for MEMS gyroscope with logarithmic quantizer[J]. IEEE Access, 2020, 8: 38596-38605. doi: 10.1109/ACCESS.2020.2974526
|
| [6] |
REN Y, CHEN X, CAI Y, et al. Attitude-rate measurement and control integration using magnetically suspended control and sensitive gyroscopes[J]. IEEE Transactions on Industrial Electronics, 2018, 65(6): 4921-4932. doi: 10.1109/TIE.2017.2772161
|
| [7] |
XU G F, CAI Y W, REN Y, et al. Application of a new Lorentz force-type tilting control magnetic bearing in a magnetically suspended control sensitive gyroscope with cross-sliding mode control[J]. Transactions of the Japan Society for Aeronautical and Space Sciences, 2018, 61(1): 40-47. doi: 10.2322/tjsass.61.40
|
| [8] |
夏长峰, 蔡远文, 任元, 等. MSCSG转子系统的扩展双频Bode图稳定性分析方法[J]. 宇航学报, 2018, 39(2): 168-176. https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201802008.htm
XIA C F, CAI Y W, REN Y, et al. Extended dual-frequency Bode diagram stability analysis method for MSCSG rotor system[J]. Journal of Astronautics, 2018, 39(2): 168-176(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201802008.htm
|
| [9] |
FANG J, REN Y, FAN Y. Nutation and precession stability criterion of magnetically suspended rigid rotors with gyroscopic effects based on positive and negative frequency characteristics[J]. IEEE Transactions on Industrial Electronics, 2014, 61(4): 2003-2014. doi: 10.1109/TIE.2013.2266077
|
| [10] |
REN Y, SU D, FANG J. Whirling modes stability criterion for a magnetically suspended flywheel rotor with significant gyroscopic effects and bending modes[J]. IEEE Transactions on Power Electronics, 2013, 28(12): 5890-5901. doi: 10.1109/TPEL.2013.2253126
|
| [11] |
FANG J C, REN Y. Decoupling control of magnetically suspended rotor system in control moment gyros based on an inverse system method[J]. IEEE/ASME Transactions on Mechatronics, 2012, 17(6): 1133-1144. doi: 10.1109/TMECH.2011.2159618
|
| [12] |
REN Y, FANG J C. High-stability and fast-response twisting motion control for the magnetically suspended rotor system in a control moment gyro[J]. IEEE/ASME Transactions on Mechatronics, 2013, 18(5): 1625-1634. doi: 10.1109/TMECH.2012.2211376
|
| [13] |
AHRENS M, KUCERA L, LARSONNEUR R. Performance of a magnetically suspended flywheel energy storage device[J]. IEEE Transactions on Control Systems Technology, 1996, 4(5): 494-502. doi: 10.1109/87.531916
|
| [14] |
FAN Y, FANG J. Experimental research on the nutational stability of magnetically suspended momentum flywheel in control moment gyroscope (CMG)[C]//Proceedings of 9th International Symposium on Magnetic Bearings, 2004: 116-121.
|
| [15] |
HUNG J Y. Magnetic bearing control using fuzzy logic[J]. IEEE Transactions on Industry Applications, 1995, 31(6): 1492-1497. doi: 10.1109/28.475746
|
| [16] |
SOBHAN P V S, KUMAR G V N, AMARNATH J. Rotor levitation by active magnetic bearings using fuzzy logic controller[C]//2010 International Conference on Industrial Electronics, Control and Robotics. Piscataway: IEEE Press, 2010: 27-29.
|
| [17] |
BENOMAIR A M, BASHIR F A, TOKHI M O. Optimal control based LQR-feedback linearisation for magnetic levitation using improved spiral dynamic algorithm[C]//201520th International Conference on Methods and Models in Automation and Robotics (MMAR). Piscataway: IEEE Press, 2015: 24-27.
|
| [18] |
ZHANG Y C, SUN G J, ZHANG Y J. Experimental verification for zero power control of 0.5 kWh class flywheel system using magnetic bearing with gyroscopic effect[C]//Proceedings of International Conference on Machine Learning and Cybernetics. Piscataway: IEEE Press, 2002: 4-5.
|
| [19] |
REN Y, FANG J. High-precision and strong-robustness control for an MSCMG based on modal separation and rotation motion decoupling strategy[J]. IEEE Transactions on Industrial Electronics, 2014, 61(3): 1539-1551. doi: 10.1109/TIE.2013.2257147
|
| [20] |
XIE J J, LIU G, WEN T. Composite compensation for load torque of active magnetic bearing in DGMSCMG[J]. Optical and Precision Engineering, 2015, 23(8): 2211-2219. doi: 10.3788/OPE.20152308.2211
|
| [21] |
KANG M S, LYOU J, LEE J K. Sliding mode control for an active magnetic bearing system subject to base motion[J]. Mechatronics, 2010, 20(1): 171-178. doi: 10.1016/j.mechatronics.2009.09.010
|
| [22] |
刘强, 赵勇, 代峰燕, 等. 磁悬浮陀螺飞轮用隐式洛伦兹力磁轴承[J]. 光学精密工程, 2018, 26(2): 399-409. https://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201802019.htm
LIU Q, ZHAO Y, DAI F Y, et al. Implicit Lorentz force magnetic bearing for magnetically suspended gyro flywheel[J]. Optics and Precision Engineering, 2018, 26(2): 399-409(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201802019.htm
|
| [23] |
夏长峰, 蔡远文, 任元, 等. 磁悬浮控制敏感陀螺转子前馈解耦内模控制[J]. 北京航空航天大学学报, 2018, 44(3): 480-488. doi: 10.13700/j.bh.1001-5965.2017.0190
XIA C F, CAI Y W, REN Y, et al. Feedforward decoupling and internal model control for rotor of magnetically suspended control and sensing gyroscope[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(3): 480-488(in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0190
|
| [24] |
BASARAN S, SIVRIOGLU S. Novel repulsive magnetic bearing flywheel system with composite adaptive control[J]. IET Electric Power Applications, 2019, 13(5): 676-685.
|
| [25] |
HAN J. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900-906.
|
| [26] |
尹增愿, 蔡远文, 王卫杰, 等. 一种组合磁钢叠加磁场洛伦兹力磁轴承设计方法[J]. 宇航学报, 2018, 39(7): 56-64. https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201807007.htm
YIN Z Y, CAI Y W, WANG W J, et al. A Lorentz force magnetic bearing design method with composite magnetic steel and superimposed magnetic field[J]. Journal of Aerospace, 2018, 39(7): 56-64(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201807007.htm
|

Figures(12) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: