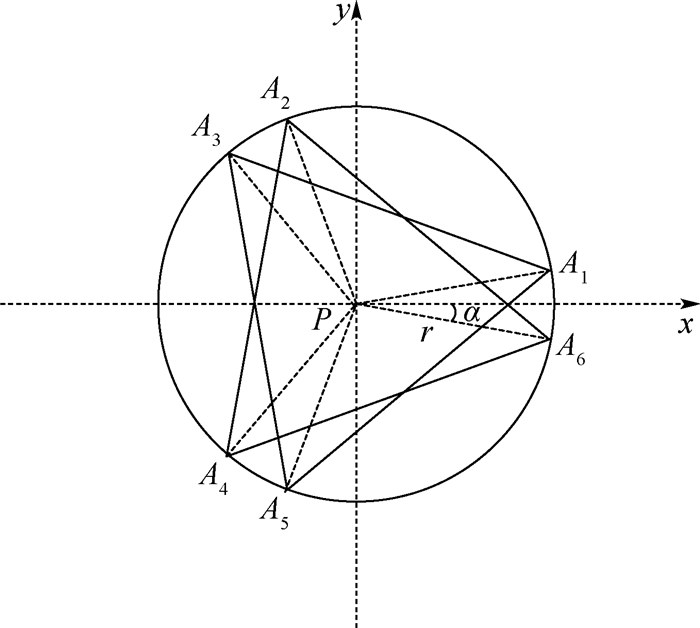
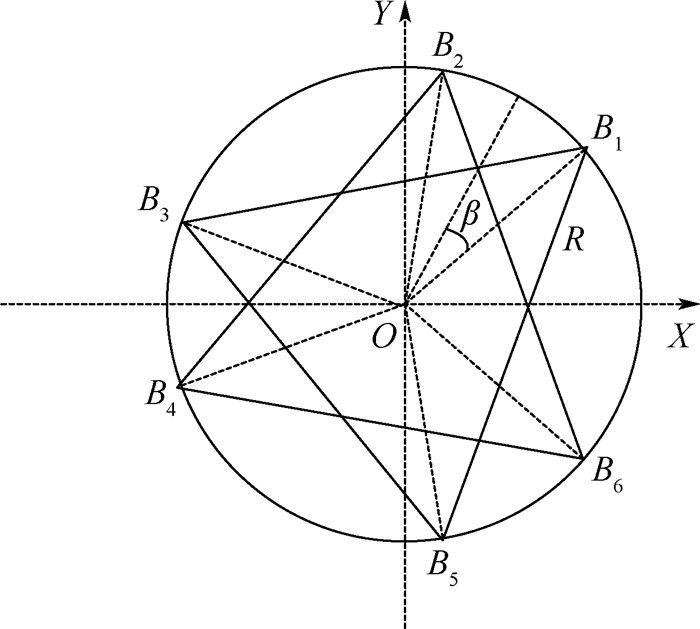
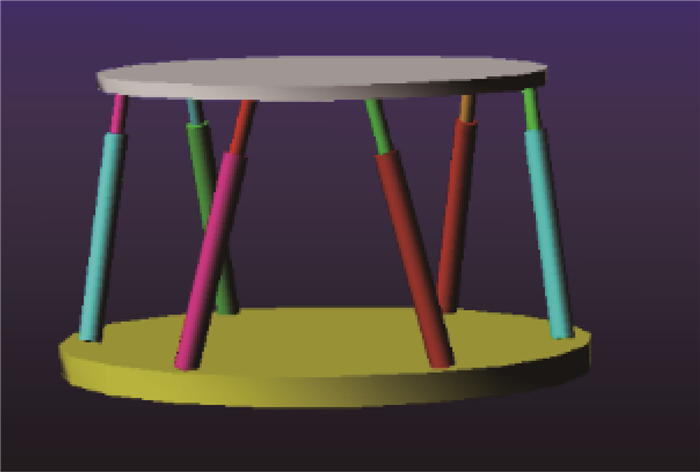
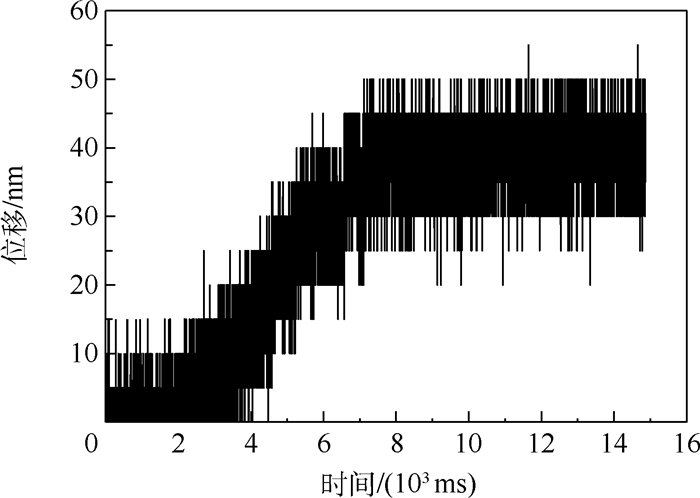
The high precision 6-DOF parallel platform can precisely adjust the position and pose of the secondary mirror of the space optical remote sensor, which could realize the ground optical alignment and the active correction of optical aberration on orbit. In order to solve the two difficulties, ie, ulti index and multi constraint structural optimization design and high-resolution driving strut design, in the development of a high-precision parallel platform, 3 steps are taken as follows: Firstly, the inverse solution mathematical model and ADAMS parametric model of the 6-DOF parallel mechanism are established, and the structure optimization objective function is determined. The structure optimization design is carried out in combination with the constraints such as strut length and hinge angle, therefore, the structure parameters and the requirement of 60 nm driving strut resolution are obtained. Then, to get high resolution strut, the driving strut based on "brushless DC motor+ball screw+grating ruler" is designed, and PI control law is used to realize the high-precision closed-loop servo control of eliminating static error. As a result, the resolution of the driving strut reaches 50 nm. Finally, the accuracy of the parallel platform is tested, and the test results show that the resolution of the platform is 0.2 μm, and the angular resolution is 1″, which meet the requirements of the index. The platform has been successfully applied to the ground optical alignment and aberration active correction experiment of the space remote sensor, which lays a solid theoretical and practical foundation for the on orbit application.



 Download (120917)
Download (120917) 
 Views
Views  Cited by
Cited by 









































































































































































 XML Online Production Platform
XML Online Production Platform
