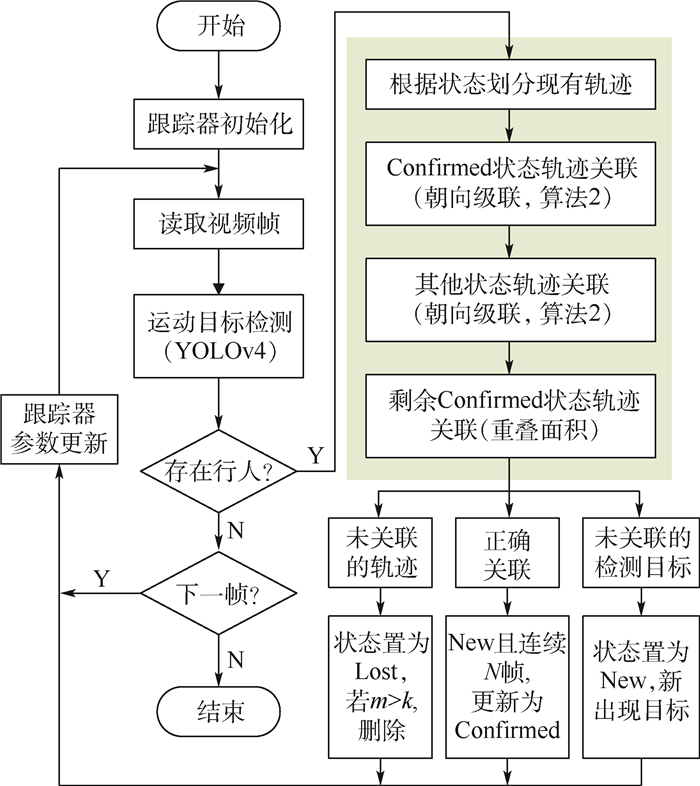
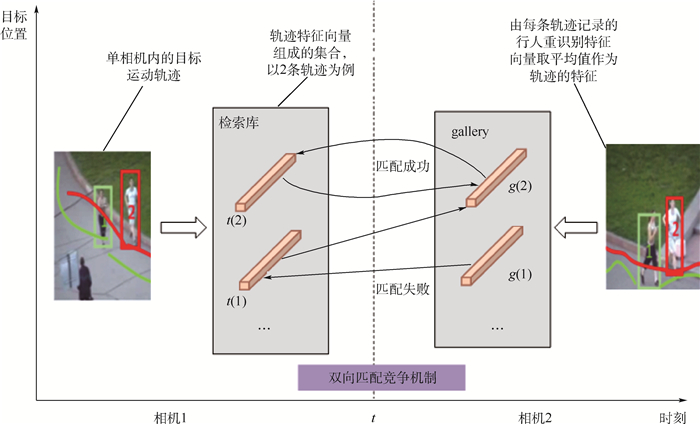
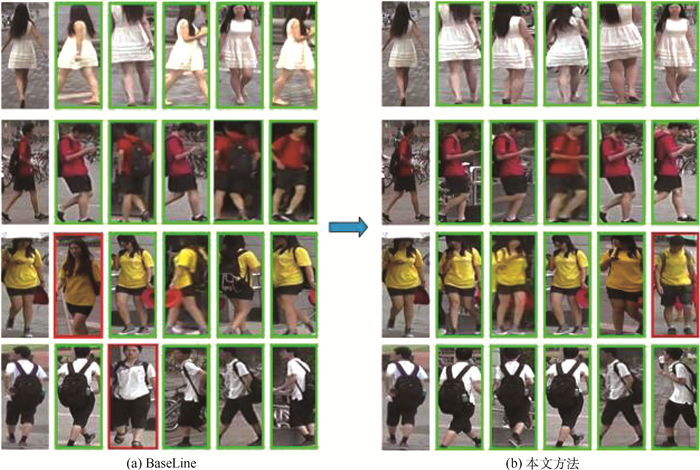
Target trajectory association method based on detection association and deep learning is one of the research hotspots in the field of computer vision. However, due to the lack of effective space-time constraints in the design of existing methods, and the insufficency of generalization ability of target apparent features, recognition errors will occur in the case of obvious differences in target orientation, which will lead to frequent ID switching and error association. To solve this problem, we propose a target trajectory association method based on orientation constraint and re-identification feature. This paper introduces pedestrian orientation discrimination into pedestrian re-identification, and presents a pedestrian re-identification network model with orientation constraint, which improves the representation ability of target features. Combining the spatial and temporal characteristics of target orientation, position information from Kalman filter and overlap area, a hierarchical trajectory association model based on orientation constraint is proposed to obtain the target trajectory in a single camera. A simple and effective bi-directional competitive matching mechanism is introduced to implement effective association of target trajectories in the cross camera scene. Experimental results show that the proposed method achieves a competitive level on MOT datasets. It can reduce frequent ID exchange, and can effectively solve the problem of error association when similar objects are moving towards each other. Meanwhile, with a frame rate of 19.6 frame/s, it can satisfy the requirements of near real-time scene.




 Download (96849)
Download (96849) 
 Views
Views  Cited by
Cited by 








































































































 XML Online Production Platform
XML Online Production Platform
