| Citation: | ZHANG Zhenyang, WANG Chengwen, GUO Xinping, et al. Backstepping sliding mode control of electro-hydraulic position servo system based on ESO[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(6): 1082-1090. doi: 10.13700/j.bh.1001-5965.2020.0724(in Chinese)

|
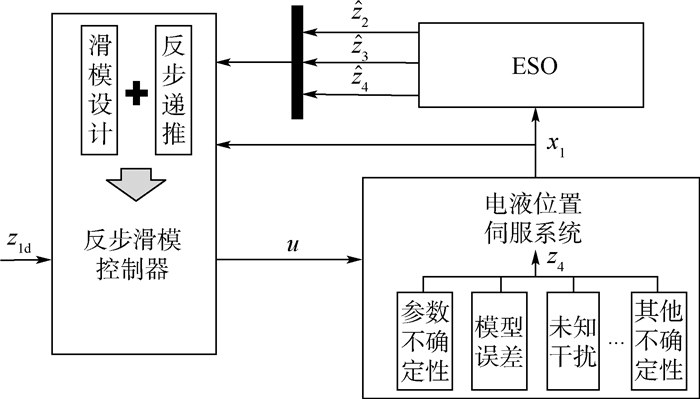
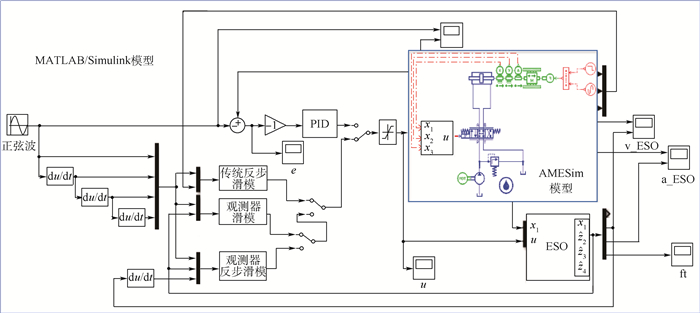
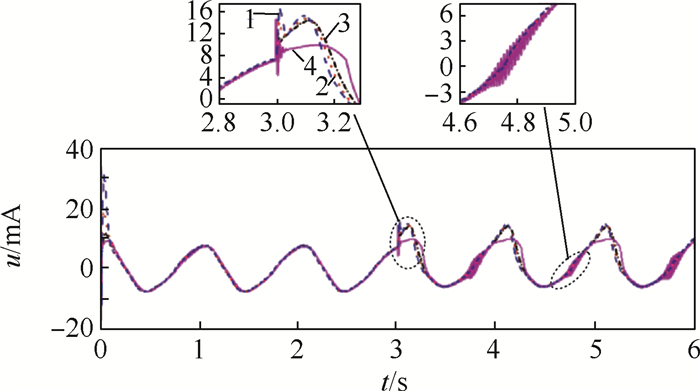
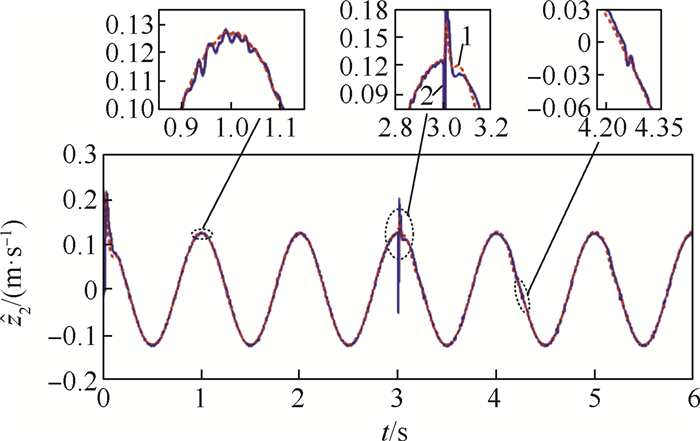
The backstepping sliding mode control method based on extended state observer (ESO) is proposed, which can solve the compound disturbance problem caused by unmodeled friction force, parameter uncertainty and external random disturbance. The ESO is designed to estimate the velocity and acceleration of actuator. The backstepping sliding mode controller is designed based on the displacement feedback signal and the estimated values of ESO. By constructing Lyapunov function including backstepping design error, sliding mode function and observer error, the stability of the proposed control method is proved. In order to verify the effectiveness of the proposed method, AMESim and MATLAB/Simulink co-simulation is carried out to compare with PID controller, traditional backstepping sliding mode controller and sliding mode controller based on ESO, and the simulation data is analyzed. The results show that the proposed method can effectively suppress the compound disturbance of the system, with higher precision and stronger robustness.

| [1] |
LI Y H, HE L Y. Counterbalancing speed control for hydrostatic drive heavy vehicle under long down-slope[J]. IEEE/ASME Transactions on Mechatronics, 2015, 20(4): 1533-1542. doi: 10.1109/TMECH.2014.2385700
|
| [2] |
董致新, 黄伟男, 葛磊, 等. 泵阀复合进出口独立控制液压挖掘机特性研究[J]. 机械工程学报, 2016, 52(12): 173-180. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201612023.htm
DONG Z X, HUANG W N, GE L, et al. Research on the performance of hydraulic excavator with pump and valve combined separate meter in and meter out circuits[J]. Journal of Mechanical Engineering, 2016, 52(12): 173-180(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201612023.htm
|
| [3] |
WANG C W, JIAO Z X, QUAN L. Nonlinear robust dual-loop control for electro-hydraulic load simulator[J]. ISA Transactions, 2015, 59: 280-289. doi: 10.1016/j.isatra.2015.10.013
|
| [4] |
WANG C W, JIAO Z X, WU S, et al. Nonlinear adaptive torque control of electro-hydraulic load system with external active motion disturbance[J]. Mechatronics, 2014, 24(1): 32-40. doi: 10.1016/j.mechatronics.2013.11.005
|
| [5] |
PI Y J, WANG X Y. Trajectory tracking control of a 6-DOF hydraulic parallel robot manipulator with uncertain load disturbances[J]. Control Engineering Practice, 2011, 19(2): 185-193. doi: 10.1016/j.conengprac.2010.11.006
|
| [6] |
付永领, 韩旭, 杨荣荣, 等. 电动静液作动器设计方法综述[J]. 北京航空航天大学学报, 2017, 43(10): 1939-1952. doi: 10.13700/j.bh.1001-5965.2017.0195
FU Y L, HAN X, YANG R R, et al. Review on design method of electro-hydrostatic actuator[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(10): 1939-1952(in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0195
|
| [7] |
YAO B, BU F P, JOHN R, et al. Adaptive robust motion control of single-rod hydraulic actuators: Theory and experiments[J]. IEEE/ASME Transactions on Mechatronics, 2000, 5(1): 79-91. doi: 10.1109/3516.828592
|
| [8] |
贾鹤鸣, 宋文龙. 基于非线性干扰观测器的L2滤波反步控制[J]. 中南大学学报(自然科学版), 2014, 45(8): 2640-2647. https://www.cnki.com.cn/Article/CJFDTOTAL-ZNGD201408015.htm
JIA H M, SONG W L. L2 filter backstepping control based on nonlinear disturbance observer[J]. Journal of Central South University (Science and Technology), 2014, 45(8): 2640-2647(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZNGD201408015.htm
|
| [9] |
WANG C W, ZHANG Z Y, WANG H, et al. Disturbance observer based output feedback control of hydraulic servo system considering mismatched uncertainties and internal pressure dynamics stability[J]. IET Control Theory and Applications, 2020, 14(8): 1046-1056. doi: 10.1049/iet-cta.2019.0346
|
| [10] |
蒲明, 吴庆宪, 姜长生, 等. 非匹配不确定高阶非线性系统递Terminal滑模控制[J]. 自动化学报, 2012, 38(11): 1777-1793. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201211008.htm
PU M, WU Q X, JIANG C S, et al. Recursive Terminal sliding mode control for higher-order nonlinear system with mismatched uncertainties[J]. Acta Automatica Sinica, 2012, 38(11): 1777-1793(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201211008.htm
|
| [11] |
GUAN C, PAN S X. Adaptive sliding mode control of electro-hydraulic system with nonlinear unknown parameters[J]. Control Engineering Practice, 2008, 16(11): 1275-1284. doi: 10.1016/j.conengprac.2008.02.002
|
| [12] |
NA J, REN X M, ZHENG D D. Adaptive control for nonlinear pure-feedback systems with high-order sliding mode observer[J]. IEEE Transactions on Neural Networks and Learning Systems, 2013, 24(3): 370-382. doi: 10.1109/TNNLS.2012.2225845
|
| [13] |
NA J, LI Y P, HUANG Y B, et al. Output feedback control of uncertain hydraulic servo systems[J]. IEEE Transactions on Industrial Electronics, 2020, 67(1): 490-500. doi: 10.1109/TIE.2019.2897545
|
| [14] |
石胜利, 李建雄, 方一鸣. 具有输入饱和的电液伺服系统反步位置跟踪控制[J]. 中南大学学报(自然科学版), 2016, 47(10): 3369-3374. https://www.cnki.com.cn/Article/CJFDTOTAL-ZNGD201610012.htm
SHI S L, LI J X, FANG Y M. Backstepping position tracking control for electro-hydraulic servo system with input saturation[J]. Journal of Central South University (Science and Technology), 2016, 47(10): 3369-3374(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZNGD201610012.htm
|
| [15] |
LIU J Y. Observer-based backstepping dynamic surface control for stochastic nonlinear strict-feedback systems[J]. Neural Computing & Applications, 2014, 24(5): 1067-1077.
|
| [16] |
JI X H, WANG C W, ZHANG Z Y, et al. Nonlinear adaptive position control of hydraulic servo system based on sliding mode back-stepping design method[J]. Proceedings of the Institution of Mechanical Engineers. Part I-Journal of Systems and Control Engineering, 2021, 235(4): 474-485.
|
| [17] |
YIN X X, LIN Y G, LI W, et al. Adaptive sliding mode back-stepping pitch angle control of a variable-displacement pump controlled pitch system for wind turbines[J]. ISA Transactions, 2015, 58: 629-634. doi: 10.1016/j.isatra.2015.07.006
|
| [18] |
方一鸣, 焦宗夏, 王文宾, 等. 轧机液压伺服位置系统的自适应反步滑模控制[J]. 电机与控制学报, 2011, 15(10): 95-100. doi: 10.3969/j.issn.1007-449X.2011.10.015
FANG Y M, JIAO Z X, WANG W B, et al. Adaptive backstepping sliding mode control for hydraulic servo position system of rolling mill[J]. Electric Machines and Control, 2011, 15(10): 95-100(in Chinese). doi: 10.3969/j.issn.1007-449X.2011.10.015
|
| [19] |
吉鑫浩, 汪成文, 陈帅, 等. 阀控电液位置伺服系统滑模反步控制方法[J]. 中南大学学报(自然科学版), 2020, 51(6): 1518-1525. https://www.cnki.com.cn/Article/CJFDTOTAL-ZNGD202006006.htm
JI X H, WANG C W, CHEN S, et al. Sliding mode backstepping control method for valve-controlled electro-hydraulic position servo system[J]. Journal of Central South University (Science and Technology), 2020, 51(6): 1518-1525(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZNGD202006006.htm
|
| [20] |
韩京清. 一类不确定对象的扩张状态观测器[J]. 控制与决策, 1995, 10(1): 85-88. doi: 10.3321/j.issn:1001-0920.1995.01.020
HAN J Q. Extended state observer for a class of uncertain plants[J]. Control and Decision, 1995, 10(1): 85-88(in Chinese). doi: 10.3321/j.issn:1001-0920.1995.01.020
|
| [21] |
HAN J Q, HUANG Y. Analysis and design for the second order nonlinear continuous extended states observer[J]. Chinese Science Bulletin, 2000, 21(3): 1938-1944.
|
| [22] |
SHI P, XIA Y Q, LIU G P, et al. On designing of sliding-mode control for stochastic jump systems[J]. IEEE Transactions on Automatic Control, 2006, 51(1): 97-103. doi: 10.1109/TAC.2005.861716
|
| [23] |
郭新平, 汪成文, 刘华, 等. 基于扩张状态观测器的泵控电液伺服系统滑模控制[J]. 北京航空航天大学学报, 2020, 46(6): 1159-1168. doi: 10.13700/j.bh.1001-5965.2019.0418
GUO X P, WANG C W, LIU H, et al. Sliding mode control of pump controlled electro-hydraulic servo system based on extended state observer[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(6): 1159-1168(in Chinese). doi: 10.13700/j.bh.1001-5965.2019.0418
|
| [24] |
CHEN H P, JYH C R, JUHNG P S. Sliding mode control with varying boundary layers for an electro-hydraulic position servo system[J]. International Journal of Advanced Manufacturing Technology, 2005, 26(1-2): 117-123. doi: 10.1007/s00170-004-2145-0
|

Figures(9) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: