| Citation: | ZHANG He, MIAO Cunxiao, TANG Youjun, et al. Dynamic obstacle avoidance method for mobile robots[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(6): 1013-1021. doi: 10.13700/j.bh.1001-5965.2020.0727(in Chinese)

|
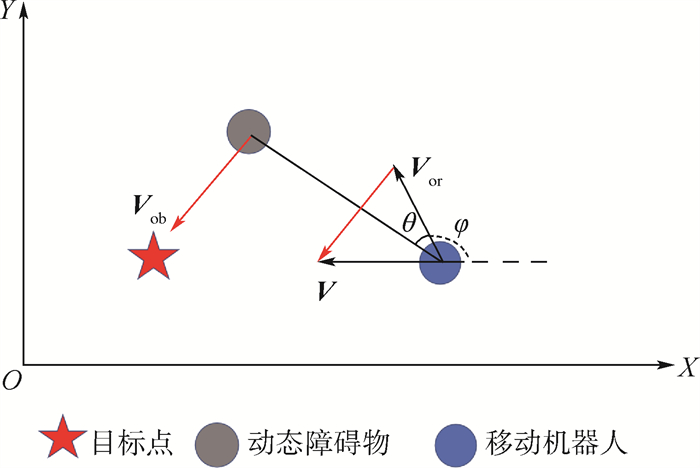
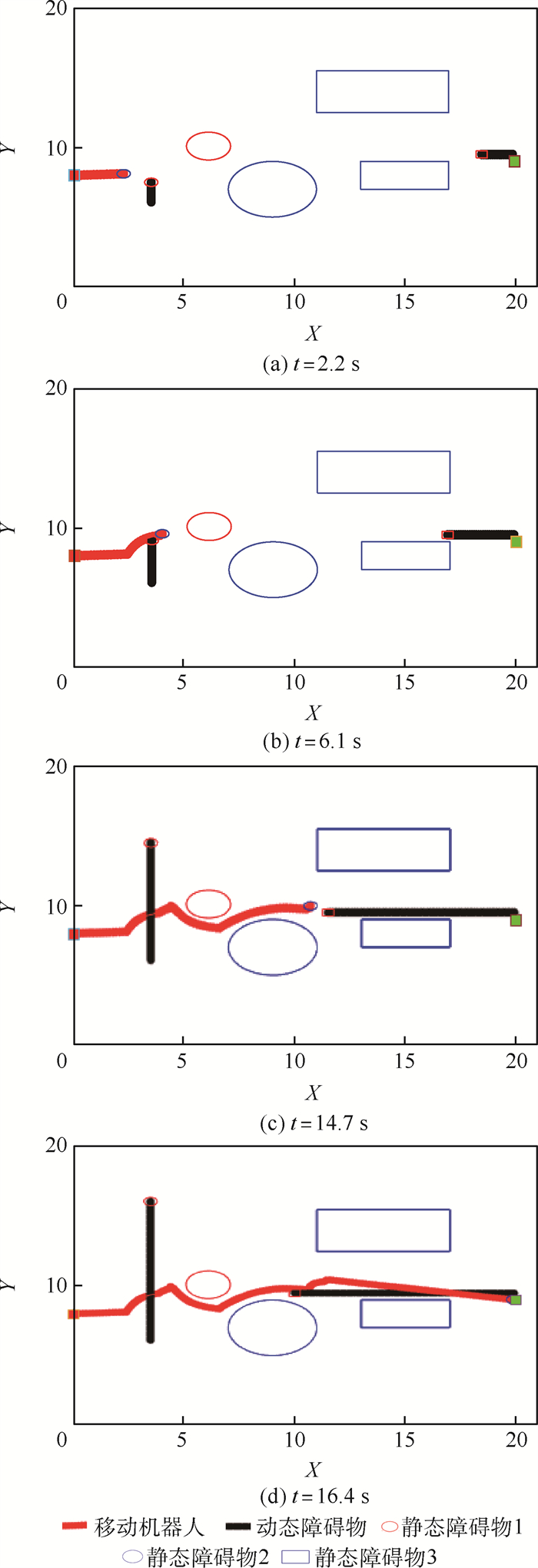
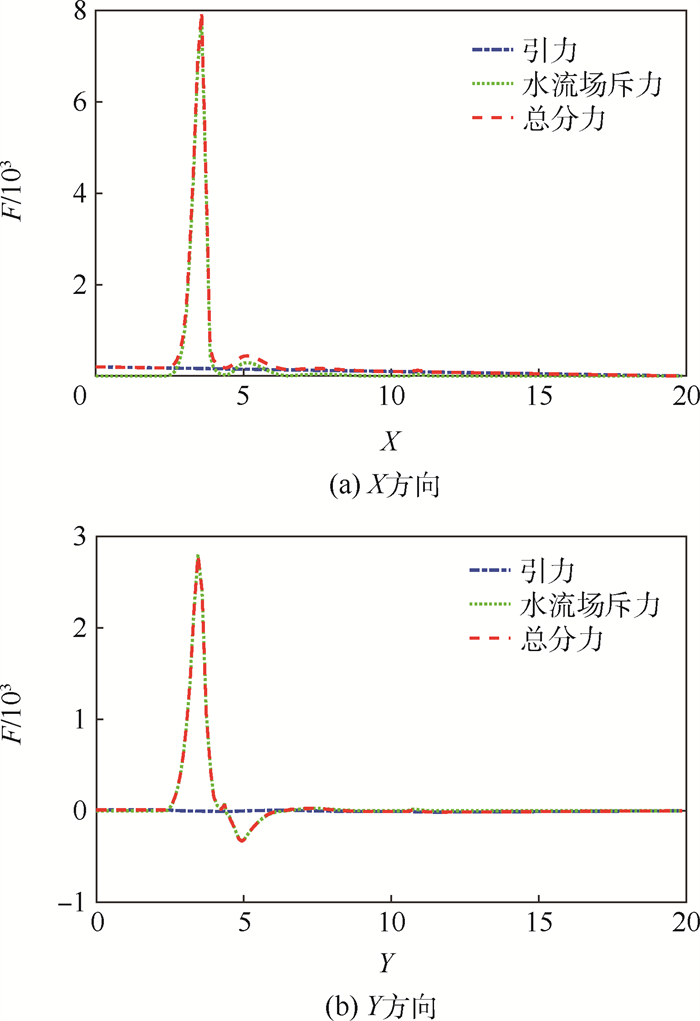
This paper proposes an autonomous dynamic obstacle avoidance method for omnidirectional mobile robot by introducing velocity repulsion field to solve the existing problems, an improvement from water flow field based artificial potential field obstacle avoidance method. This paper presents a detailed analysis of problems of artificial potential field improved by water flow field, such as a too long avoidance path or avoidance failure caused by the mobile robot moving in front of the obstacles. To solve the above problems, the velocity repulsion field, in line with the relative velocity of the mobile robot and the dynamic obstacle, is introduced in artificial potential field obstacle avoidance method based on water flow field. With the omni-directional mobile robot moving in rear of the obstacles, a safe and autonomous dynamic obstacle avoidance is fully realized. The effectiveness and practicability of the autonomous dynamic obstacle avoidance algorithm are verified through simulation and indoor obstacle avoidance experiment.

| [1] |
庞师坤, 梁晓锋, 李英辉, 等. 基于零空间行为法的自主水下机器人避障策略[J]. 上海交通大学学报, 2020, 54(3): 295-304. https://www.cnki.com.cn/Article/CJFDTOTAL-SHJT202003010.htm
PANG S K, LIANG X F, LI Y H, et al. Collision avoidance strategy for autonomous underwater vehicle based on null-space-based behavioral approach[J]. Journal of Shanghai Jiao Tong University, 2020, 54(3): 295-304(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-SHJT202003010.htm
|
| [2] |
付丽霞, 任玉洁, 张勇, 等. 基于改进平滑A*算法的移动机器人路径规划[J]. 计算机仿真, 2020, 37(8): 271-276. https://www.cnki.com.cn/Article/CJFDTOTAL-JSJZ202008058.htm
FU L X, REN Y J, ZHANG Y, et al. Path planning of mobile robot based on improved smoothing A* algorithms[J]. Computer Simulation, 2020, 37(8): 271-276(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JSJZ202008058.htm
|
| [3] |
MONTIEL O, OROZCO-ROSAS U, SEP U ' LVEDA R. Path planning for mobile robots using bacterial potential field for avoiding static and dynamic obstacles[J]. Expert Systems with Applications, 2015, 42(12): 5177-5191. doi: 10.1016/j.eswa.2015.02.033
|
| [4] |
杨明辉, 吴垚, 张勇, 等. 室内动态环境下的移动机器人自主避障策略[J]. 中南大学学报(自然科学版), 2019, 50(8): 1833-1839. https://www.cnki.com.cn/Article/CJFDTOTAL-ZNGD201908010.htm
YANG M H, WU Y, ZHANG Y, et al. Autonomous obstacle avoidance strategy for mobile robots in indoor dynamic environment[J]. Journal of Central South University (Science and Technology), 2019, 50(8): 1833-1839(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZNGD201908010.htm
|
| [5] |
李卫硕, 孙剑, 陈伟. 基于BP神经网络机器人实时避障算法[J]. 仪器仪表学报, 2019, 40(11): 204-211. https://www.cnki.com.cn/Article/CJFDTOTAL-YQXB201911025.htm
LI W S, SUN J, CHEN W. Real-time obstacle avoidance algorithm for robots based on BP neural network[J]. Chinese Journal of Scientific Instrument, 2019, 40(11): 204-211(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-YQXB201911025.htm
|
| [6] |
RAMEZANI D A, LEE D J. An end-to-end deep reinforcement learning-based intelligent agent capable of autonomous exploration in unknown environments[J]. Sensors, 2018, 18(10): 3575. doi: 10.3390/s18103575
|
| [7] |
庞磊, 曹志强, 喻俊志. 基于A*和TEB融合的行人感知无碰跟随方法[J]. 航空学报, 2021, 42(4): 524909. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB202104036.htm
PANG L, CAO Z Q, YU J Z. A pedestrian-aware collision-free following approach for mobile robots based on A* and TEB[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(4): 524909(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB202104036.htm
|
| [8] |
槐创锋, 郭龙, 贾雪艳, 等. 改进A*算法与动态窗口法的机器人动态路径规划[J]. 计算机工程与应用, 2021, 57(8): 244-248. https://www.cnki.com.cn/Article/CJFDTOTAL-JSGG202108034.htm
HUAI C F, GUO L, JIA X Y, et al. Improved A* algorithm and dynamic window method for robot dynamic path planning[J]. Computer Engineering and Applications, 2021, 57(8): 244-248(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JSGG202108034.htm
|
| [9] |
程志, 张志安, 乐伟扬, 等. 基于D* Lite算法的三维路径规划研究[J]. 传感器与微系统, 2020, 39(12): 71-73. https://www.cnki.com.cn/Article/CJFDTOTAL-CGQJ202012021.htm
CHENG Z, ZHANG Z A, YUE W Y, et al. Research on path planning in 3D terrain based on D* Lite algorithm[J]. Transducer and Microsystem Technologies, 2020, 39(12): 71-73(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-CGQJ202012021.htm
|
| [10] |
徐开放. 基于D*Lite算法的移动机器人路径规划研究[D]. 哈尔滨: 哈尔滨工业大学, 2017.
XU K F. Research on mobile robot path-planning based on D* Lite algorithm[D]. Harbin: Harbin Institute of Technology, 2017(in Chinese).
|
| [11] |
张贺, 胡越黎, 王权, 等. 基于改进D*算法的移动机器人路径规划[J]. 工业控制计算机, 2016, 29(11): 73-74. https://www.cnki.com.cn/Article/CJFDTOTAL-GYKJ201611035.htm
ZHANG H, HU Y L, WANG Q, et al. Path planning of mobile robot based on improved D* algorithm[J]. Industrial Control Computer, 2016, 29(11): 73-74(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-GYKJ201611035.htm
|
| [12] |
朱战霞, 靖飒, 仲剑飞, 等. 基于碰撞检测的空间冗余机械臂避障路径规划[J]. 西北工业大学学报, 2020, 38(1): 183-190. https://www.cnki.com.cn/Article/CJFDTOTAL-XBGD202001023.htm
ZHU Z X, JING S, ZHONG J F, et al. Obstacle avoidance path planning of space redundant manipulator based on a collision detection algorithm[J]. Journal of Northwestern Polytechnical University, 2020, 38(1): 183-190(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XBGD202001023.htm
|
| [13] |
LIN Y H, HUANG L C, CHEN S Y, et al. The optimal route planning for inspection task of autonomous underwater vehicle composed of MOPSO-based dynamic routing algorithm in currents[J]. Applied Ocean Research, 2018, 75: 178-192.
|
| [14] |
魏彤, 龙琛. 基于改进遗传算法的移动机器人路径规划[J]. 北京航空航天大学学报, 2020, 46(4): 703-711. doi: 10.13700/j.bh.1001-5965.2019.0298
WEI T, LONG C. Path planning for mobile robot based on improved genetic algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(4): 703-711(in Chinese). doi: 10.13700/j.bh.1001-5965.2019.0298
|
| [15] |
郭一聪, 刘小雄, 章卫国, 等. 基于改进势场法的无人机三维路径规划方法[J]. 西北工业大学学报, 2020, 38(5): 977-986. https://www.cnki.com.cn/Article/CJFDTOTAL-XBGD202005009.htm
GUO Y C, LIU X X, ZHANG W G, et al. 3D path planning method for UAV based on improved artificial potential field[J]. Journal of Northwestern Polytechnical University, 2020, 38(5): 977-986(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XBGD202005009.htm
|
| [16] |
陈麒杰, 晋玉强, 王陶昱. 基于改进人工势场算法的无人机群避障算法研究[J]. 导航定位与授时, 2020, 7(6): 109-113. https://www.cnki.com.cn/Article/CJFDTOTAL-DWSS202006016.htm
CHEN Q J, JIN Y Q, WANG T Y. Research on obstacle avoidance algorithm of UAV group based on improved artificial potential field algorithm[J]. Navigation Positioning and Timing, 2020, 7(6): 109-113(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DWSS202006016.htm
|
| [17] |
崔宝侠, 宋佳瑞. 未知环境下机器人避障及动态目标追踪[J]. 沈阳工业大学学报, 2018, 40(3): 292-298. https://www.cnki.com.cn/Article/CJFDTOTAL-SYGY201803010.htm
CUI B X, SONG J R. Obstacle avoidance and dynamic target tracking of robot in unknown environment[J]. Journal of Shenyang University of Technology, 2018, 40(3): 292-298(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-SYGY201803010.htm
|
| [18] |
杜婉茹, 王潇茵, 田涛, 等. 面向未知环境及动态障碍的人工势场路径规划算法[J]. 计算机科学, 2021, 48(2): 250-256. https://www.cnki.com.cn/Article/CJFDTOTAL-JSJA202102033.htm
DU W R, WANG X Y, TIAN T, et al. Artificial potential field path planning algorithm for unknown environment and dynamic obstacles[J]. Computer Science, 2021, 48(2): 250-256(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JSJA202102033.htm
|
| [19] |
张大志, 刘万辉, 缪存孝, 等. 全向移动机器人动态避障方法[J]. 北京航空航天大学学报, 2021, 47(6): 1115-1123. doi: 10.13700/j.bh.1001-5965.2020.0155
ZHANG D Z, LIU W H, MIAO C X, et al. Dynamic obstacle avoidance method for omnidirectional mobile robots[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(6): 1115-1123(in Chinese). doi: 10.13700/j.bh.1001-5965.2020.0155
|

Figures(13) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: