| Citation: | XIONG Ying, LIU Qiang, REN Yuan, et al. Lorentz inertial stability platform control based on KF-LESO-PID[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(6): 1072-1081. doi: 10.13700/j.bh.1001-5965.2020.0721(in Chinese)

|
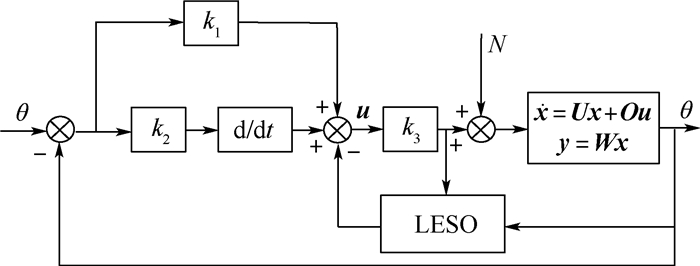
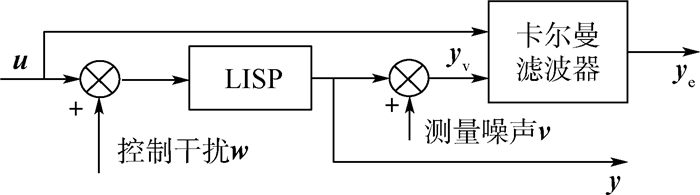
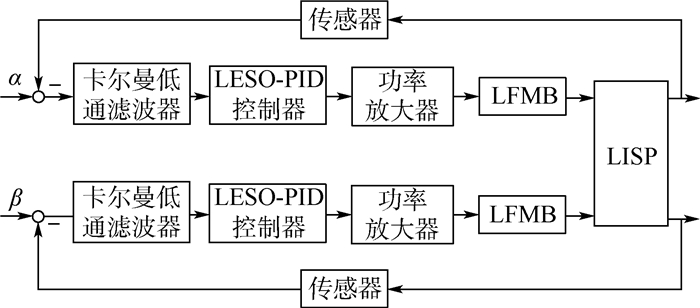
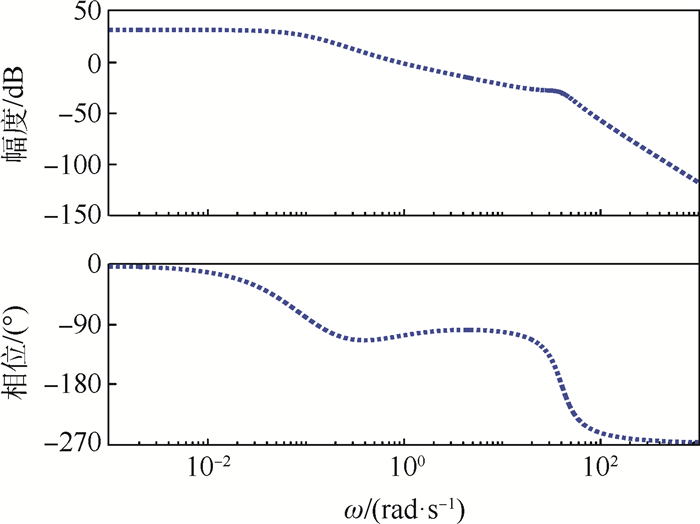
To overcome the disadvantages of the existing inertial stabilization platform such as large interference for using mechanical bearings, high difficulty for using air/liquid bearings and poor linearity for using magnetic resistance magnetic bearings, a new Lorentz inertial stability platform (LISP) based on Lorentz force deflection magnetic bearing is proposed. To suppress the influence of coupling effect and load-bearing friction resonance interference on the high-frequency attitude compensation control of the platform deflection channel, a digital control scheme based on LESO-PID combined with Kalman filter (KF) feedback is proposed. According to the structural characteristics of rotor tilt supported by Lorentz force magnetic bearing (LFMB), a dynamics model for LISP deflection is established; the tilting relationship of two radial channels is analyzed with the established model, and the linear extended state observer (LESO) and Kalman filter feedback control is introduced into PID controller to suppress friction resonance interference and coupling effects; a digital control system based on DSP and FPGA is construed, and the control method is digitalized in a discrete form. The stability of the proposed control method is analyzed by logarithmic frequency characteristic criterion and Nichols curve, and the stabilities of the rotor deflection channel before and after importing LESO-Kalman are compared through simulation. Experimental results show that with traditional PID, the rotor system causes serious distortion at high frequency, while the system reduces noise and interference greatly after importing LESO-Kalman control. Meanwhile, the internal state parameters of the system can be monitored in real time. Experimental results verify the effectiveness of proposed control method to suppress the frictional resonance interference and coupling effects.

| [1] |
HILKERT J M. Inertially stabilized platform technology concepts and principles[J]. IEEE Control Systems Magazine, 2008, 28(1): 26-46. doi: 10.1109/MCS.2007.910256
|
| [2] |
MASTEN M K. Inertially stabilized platforms for optical imaging systems[J]. IEEE Control Systems Magazine, 2008, 28(1): 47-64. doi: 10.1109/MCS.2007.910201
|
| [3] |
ZHAO Y, LIU Q, MA L M, et al. Novel Lorentz force-type magnetic bearing with flux congregating rings for magnetically suspended gyrowheel[J]. IEEE Transactions on Magnetics, 2019, 55(12): 1-8.
|
| [4] |
XU G F, CAI Y W, REN Y, et al. Application of a new Lorentz force-type tilting control magnetic bearing in a magnetically suspended control sensitive gyroscope with cross-sliding mode control[J]. Transactions of the Japan Society for Aeronautical and Space Sciences, 2018, 61(1): 40-47. doi: 10.2322/tjsass.61.40
|
| [5] |
夏长峰, 蔡远文, 任元, 等. 磁悬浮控制敏感陀螺转子偏转通道稳定控制方法[J]. 控制理论与应用, 2020, 37(7): 1535-1543. https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY202007011.htm
XIA C F, CAI Y W, REN Y, et al. Stable control method for rotor tilt channel in magnetically suspended control and sensing gyro[J]. Control Theory & Applications, 2020, 37(7): 1535-1543(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY202007011.htm
|
| [6] |
LIU Q, LI H, WANG W, et al. Analysis and experiment of 5-DOF decoupled spherical vernier-gimballing magnetically suspended flywheel (VGMSFW)[J]. IEEE Access, 2020, 8: 111707-111717. doi: 10.1109/ACCESS.2020.3001144
|
| [7] |
李志俊, 包启亮, 毛耀, 等. 惯性平台稳定回路多闭环串级控制[J]. 光电工程, 2010, 37(5): 19-24. https://www.cnki.com.cn/Article/CJFDTOTAL-GDGC201005007.htm
LI Z J, BAO Q L, MAO Y, et al. Multi-closed loops cascade control for stabilization of inertia platform[J]. Opto-Electronic Engineering, 2010, 37(5): 19-24(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-GDGC201005007.htm
|
| [8] |
ZHOU X Y, LI Y T, JIA Y, et al. An improved fuzzy neural network compound control scheme for inertially stabilized platform for aerial remote sensing applications[J]. International Journal of Aerospace Engineering, 2018, 2018: 7021038.
|
| [9] |
ZHANG Y S, YANG T, LI C Y, et al. Fuzzy-PID control for the position loop of aerial inertially stabilized platform[J]. Aerospace Science and Technology, 2014, 36: 21-26. doi: 10.1016/j.ast.2014.03.010
|
| [10] |
TSAI M S, LIN M T, YAU H T. Development of command-based iterative learning control algorithm with consideration of friction, disturbance, and noise effects[J]. IEEE Transactions on Control Systems Technology, 2006, 14(3): 511-518. doi: 10.1109/TCST.2005.860521
|
| [11] |
GE S S, LEE T H, ZHAO Q. Real-time neural network control of a free gyro stabilized mirror system[C]//Proceedings of the 1997 American Control Conference. Piscataway: IEEE Press, 1997: 1076-1080.
|
| [12] |
SHTESSEL Y B. Sliding mode stabilization of three axis inertial platform[C]//Proceedings of 26th Southeastern Symposium on System Theory. Piscataway: IEEE Press, 1994: 54-58.
|
| [13] |
WANG L, LING M X, WANG D Z, et al. Line-of-sight stabilization system based on fractional-order control[C]//2008 2nd International Symposium on Systems and Control in Aerospace and Astronautics. Piscataway: IEEE Press, 2008: 1-4.
|
| [14] |
贾琳, 孟卫锋. 滑模变结构控制在惯性平台稳定回路中的应用[J]. 科学技术与工程, 2009, 9(2): 433-436. doi: 10.3969/j.issn.1671-1815.2009.02.053
JIA L, MENG W F. Sliding mode variable structure control in the stabilization loop of inertial platform[J]. Science Technology and Engineering, 2009, 9(2): 433-436(in Chinese). doi: 10.3969/j.issn.1671-1815.2009.02.053
|
| [15] |
李红光, 鱼云岐, 宋亚民. 最优控制在车载惯性平台稳定回路中的应用[J]. 应用光学, 2007, 28(3): 251-256. doi: 10.3969/j.issn.1002-2082.2007.03.002
LI H G, YU Y Q, SONG Y M. Application of optimal control for stabilization loop of vehicle inertial platform[J]. Journal of Applied Optics, 2007, 28(3): 251-256(in Chinese). doi: 10.3969/j.issn.1002-2082.2007.03.002
|
| [16] |
WANG C E, TANG J Q. Design and mathematical analysis of a novel reluctance force-type hybrid magnetic bearing for flywheel with gimballing capability[J]. Mathematical Problems in Engineering, 2013, 2013: 836058.
|
| [17] |
TANG J Q, XIANG B, WANG C E. Rotor's suspension for vernier-gimballing magnetically suspended flywheel with conical magnetic bearing[J]. ISA Transactions, 2015, 58: 509-519. doi: 10.1016/j.isatra.2015.05.011
|
| [18] |
王新华, 陈增强, 袁著祉. 基于扩张观测器的非线性不确定系统输出跟踪[J]. 控制与决策, 2004, 19(10): 1113-1116. doi: 10.3321/j.issn:1001-0920.2004.10.008
WANG X H, CHEN Z Q, YUAN Z Z. Output tracking based on extended observer for nonlinear and uncertain systems[J]. Control and Decision, 2004, 19(10): 1113-1116(in Chinese). doi: 10.3321/j.issn:1001-0920.2004.10.008
|
| [19] |
王新华, 刘金琨. 微分器设计与应用: 信号滤波与求导[M]. 北京: 电子工业出版社, 2010: 152-153.
WANG X H, LIU J K. Differentiator design and application: Signal filtering and differentiation[M]. Beijing: Publishing House of Electronics Industry, 2010: 152-153(in Chinese).
|
| [20] |
AHRENS J H, KHALIL H K. High-gain observers in the presence of measurement noise: A switched-gain approach[J]. Automatica, 2009, 45(4): 936-943. doi: 10.1016/j.automatica.2008.11.012
|
| [21] |
夏长峰, 蔡远文, 任元, 等. MSCSG转子系统的扩展双频Bode图稳定性分析方法[J]. 宇航学报, 2018, 39(2): 168-176. https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201802008.htm
XIA C F, CAI Y W, REN Y, et al. Stability analysis method with extended double-frequency Bode diagram for rotor of MSCSG[J]. Journal of Astronautics, 2018, 39(2): 168-176(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201802008.htm
|
| [22] |
GARCIA-SANZ M. The Nyquist stability criterion in the Nichols chart[J]. International Journal of Robust and Nonlinear Control, 2016, 26(12): 2643-2651. doi: 10.1002/rnc.3465
|
Figures(19) / Tables(1)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.







 DownLoad:
DownLoad: