| Citation: | LIU Ronghua, LIU Shuguang, ZHANG Boyang, et al. 3D cooperative path following control of multi-UAVs with input saturation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(6): 1038-1049. doi: 10.13700/j.bh.1001-5965.2020.0701(in Chinese)

|
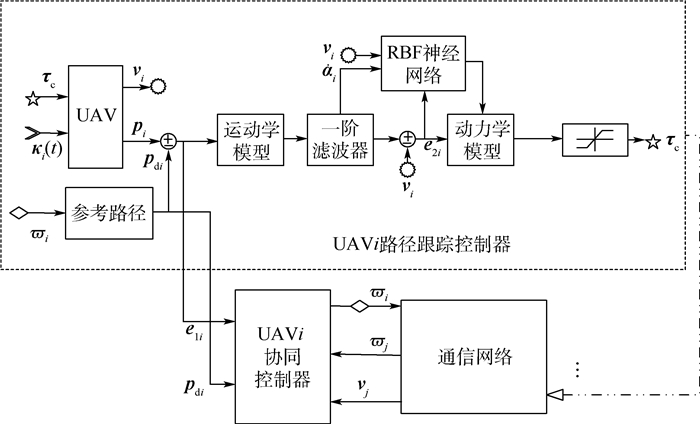
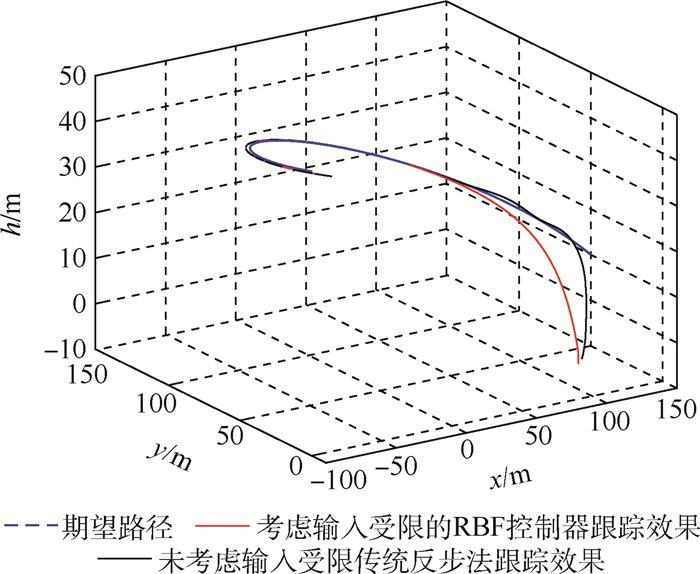
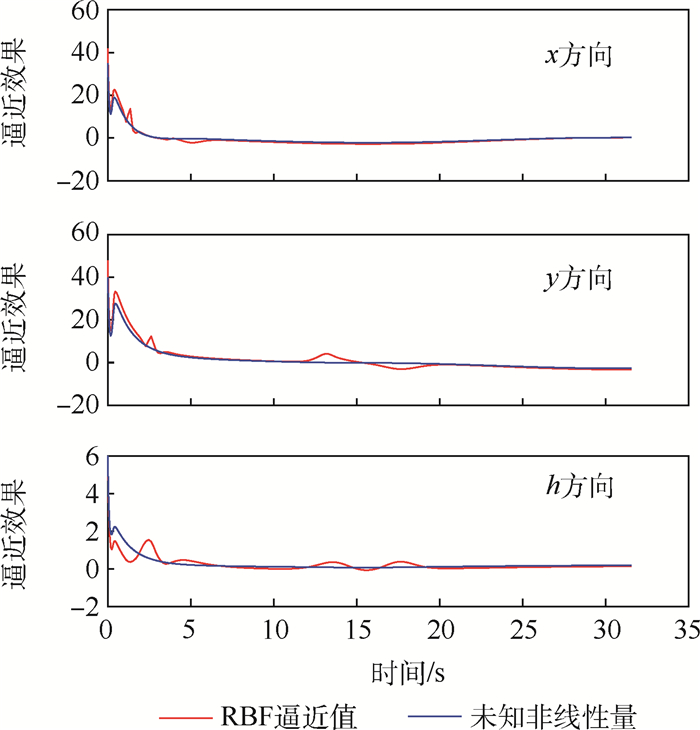
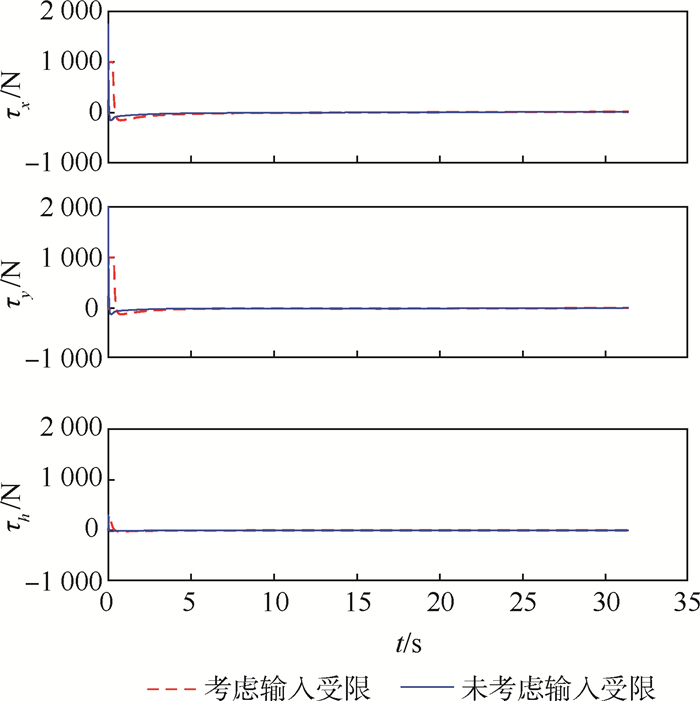
Aiming at the problem of multi-UAV cooperative path following in three-dimensional space, a cooperative controller was designed based on backstepping. To avoid control input saturation, an auxiliary controller was introduced to ensure control performance of the system. The six degrees of freedom nonlinear model of the UAV was feedback linearized, and the uncertain disturbances of the UAV and the unmodeled dynamics of the model itself were estimated and compensated online by radial basis function, thus improving the robustness of the system and its capacity to resist disturbances. Meanwhile, a first-order filter was introduced to avoid the derivation of the virtural control variable in the backstepping method. The graph theory was adopted to solve the communication problem between UAVs, and the consensus theory to realize the cooperative control of multiple UAVs. Finally, the Lyapunov stability theory was used to prove the stability of the system. The simulation results show that the designed cooperative path following controller can achieve good cooperative tracking control effects.

| [1] |
CHUNG S J, PARANJAPE A A, DAMES P, et al. A survey on aerial swarm robotics[J]. IEEE Transactions on Robotics, 2018, 34(4): 837-855. doi: 10.1109/TRO.2018.2857475
|
| [2] |
CABECINHAS D, CUNHA R, SILVESTRE C. Rotorcraft path following control for extended flight envelope coverage[C]//Proceedings of the IEEE Conference on Decision and Control. Piscataway: IEEE Press, 2009: 3460-3465.
|
| [3] |
CABECINHAS D, CUNHA R, SILVESTRE C. A globally stabilizing path following controller for rotorcraft with wind disturbance rejection[J]. IEEE Transactions on Control Systems Technology, 2015, 23(2): 708-714. doi: 10.1109/TCST.2014.2326820
|
| [4] |
KLAUSEN K, FOSSEN T, JOHANSEN T, et al. Cooperative path-following for multirotor UAVs with a suspended payload[C]//2015 IEEE Conference on Control Applications (CCA). Piscataway: IEEE Press, 2015: 1354-1360.
|
| [5] |
AKKINAPALLI V S, NIERMEYER P, LOHMANN B, et al. Adaptive nonlinear design plant uncertainty cancellation for a multirotor[C]//2016 International Conference on Unmanned Aircraft Systems (ICUAS). Piscataway: IEEE Press, 2016: 1102-1110.
|
| [6] |
RUCCO A, AGUIAR A P, HAUSER J. Trajectory optimization for constrained UAVs: A virtual target vehicle approach[C]//2015 International Conference on Unmanned Aircraft Systems(ICUAS). Piscataway: IEEE Press, 2015: 236-245.
|
| [7] |
RUCCO A, AGUIAR A P, PEREIRA F L, et al. A predictive path-following approach for fixed-wing unmanned aerial vehicles in presence of wind disturbances[C]//Robot 2015: Second Iberian Robotics Conference. Berlin: Springer, 2016: 623-634.
|
| [8] |
SINGH S, PADHI R. Automatic path planning and control design for autonomous landing of UAVs using dynamic inversion[C]//Proceedings of the American Control Conference. Piscataway: IEEE Press, 2009: 2409-2414.
|
| [9] |
AKHTAR A, WASLANDER S, NIELSEN C. Fault tolerant path following for a quadrotor[C]//Proceedings of the IEEE Conference on Decision and Control. Piscataway: IEEE Press, 2013: 847-852.
|
| [10] |
BYRNES C I, ISIDORI A. Asymptotic stabilization of minimum phase nonlinear systems[J]. IEEE Transactions on Automatic Control, 1991, 36(10): 1122-1137. doi: 10.1109/9.90226
|
| [11] |
EDWARDS C, SPURGEON S K. Sliding mode control: Theory and applications[M]. London: Taylor & Francis, 1988: 43-50.
|
| [12] |
SHAH M Z, SAMAR R, BHATI A. Lateral track control of UAVs using the sliding mode approach: From design to flight testing[J]. Transactions of the Institute of Measurement and Control, 2015, 37(4): 457-474. doi: 10.1177/0142331214543093
|
| [13] |
ROZA A, MAGGIORE M. Path following controller for a quadrotor helicopter[C]//Proceedings of the American Control Conference. Piscataway: IEEE Press, 2012: 4655-4660.
|
| [14] |
XARGAY E, KAMINER I, PASCOAL A, et al. Time-critical cooperative path following of multiple unmanned aerial vehicles over time-varying networks[J]. Journal of Guidance, Control, and Dynamics, 2013, 36(2): 499-516. doi: 10.2514/1.56538
|
| [15] |
WANG Y, WANG D, ZHU S. Cooperative moving path following for multiple fixed-wing unmanned aerial vehicles with speed constraints[J]. Automatica, 2019, 100: 82-89. doi: 10.1016/j.automatica.2018.11.004
|
| [16] |
CHEN H, CONG Y, WANG X, et al. Coordinated path-following control of fixed-wing unmanned aerial vehicles[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(4): 2540-2554. doi: 10.1109/TSMC.2021.3049681
|
| [17] |
崔正阳, 王勇. 无人机固定时间路径跟踪容错制导控制研究[J]. 北京航空航天大学学报, 2021, 47(8): 1619-1627. doi: 10.13700/j.bh.1001-5965.2020.0250
CUI Z Y, WANG Y. Fault tolerant fixed-time path following control of UAV[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(8): 1619-1627(in Chinese). doi: 10.13700/j.bh.1001-5965.2020.0250
|
| [18] |
鲜斌, 李宏图. 分布式多无人机的时变编队非线性控制设计[J]. 控制与决策, 2021, 36(10): 2490-2496. https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC202110020.htm
XIAN B, LI H T. Time-varying formation nonlinear control of distributed multiple UAVs[J]. Control and Decision, 2021, 36(10): 2490-2496(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC202110020.htm
|
| [19] |
MENON P K, SWERIDUK G D, SRIDHAR B. Optimal strategies for free-flight air traffic conflict resolution[J]. Journal of Guidance, Control, and Dynamics, 1999, 22(2): 202-211. doi: 10.2514/2.4384
|
| [20] |
WANG J, XIN M. Integrated optimal formation control of multiple unmanned aerial vehicles[J]. IEEE Transactions on Control Systems Technology, 2013, 21(5): 1731-1744. doi: 10.1109/TCST.2012.2218815
|
| [21] |
MENON P K A. Short-range nonlinear feedback strategies for aircraft pursuit-evasion[J]. Journal of Guidance, Control, and Dynamics, 1989, 12(1): 27-32. doi: 10.2514/3.20364
|
| [22] |
HARTMAN E J, KEELER J D, KOWALSKI J M. Layered neural networks with Gaussian hidden units as universal approximations[J]. Neural Computation, 1990, 2: 210-215. doi: 10.1162/neco.1990.2.2.210
|
| [23] |
AGUIAR A P, HESPANHA J P. Trajectory-tracking and path-following of underactuated autonomous vehicles with parametric modeling uncertainty[J]. IEEE Transactions on Automatic Control, 2007, 52(8): 1362-1379. doi: 10.1109/TAC.2007.902731
|
| [24] |
RUBI B, PEREZ R, MORCEGO B. A survey of path following control strategies for UAVs focused on quadrotors[J]. Journal of Intelligent & Robotic Systems, 2020, 98: 241-265.
|
| [25] |
OLFATI-SABER R, MURRAY R M. Consensus problems in networks of agents with switching topology and time-delays[J]. IEEE Transactions on Automatic Control, 2004, 49(9): 1520-1533. doi: 10.1109/TAC.2004.834113
|
| [26] |
GHABCHELOO R, PASCOAL A, SILVESTRE C, et al. Nonlinear coordinated path following control of multiple wheeled robots with bidirectional communication constraints[J]. International Journal of Adaptive Control and Signal Processing, 2007, 21: 133-157. doi: 10.1002/acs.923
|

Figures(10)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: